(5) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ИНЕРЦИОННЫМ ОБЪЕКТОМ ПРИ ОГРАНИЧЕННОМ УПРАВЛЯЮЩЕМ ВОЗДЕЙСТВИИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля исправности объекта | 1981 |
|
SU987581A1 |
| Релейно-импульсный регулятор для объекта второго порядка | 1980 |
|
SU943640A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Система с переменной структурой | 1984 |
|
SU1238029A1 |
| Многоканальный регулятор | 1986 |
|
SU1388840A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для регулирования уровня жидкости в резервуаре | 1988 |
|
SU1679470A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1671694A2 |

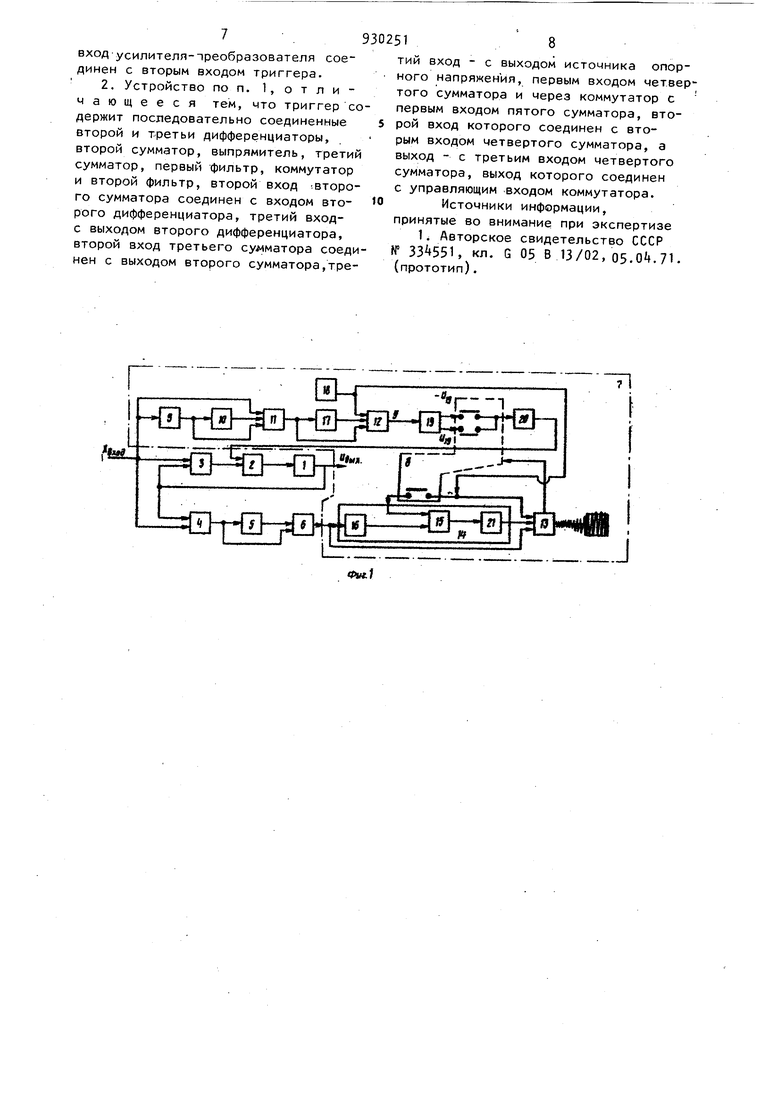
.. Изобретение относится к устройствам автоматического управления, используемых перимуществённо для управления объектами, обладающими большой инерционностью, нежесткостью и механическими нелинейностями типа люфт, сухое трение и др. По основному авт. св. If известно устройство для автоматического управления инерционным объектом при ограниченном управляющем воз действии, содержащее последовательно соединенные усилитель-преобразова тель, исполнительный орган и объект управления, выход которого соединен с первыми входами усилителя-преобразователя и формирователя сигнала оши ки, второй вход которого соединен с вторым входом усилителя-преобразова теля , а выход - с входом дифференциа тора, выход которого соединен с первым входом сумматора, второй вход ко торого соединен с выходом формирован сигнала ошибки, а выход через триггер соединен с вторым-входом исполнительного органа. . Недостатками известного устройства являются низкая точность и большая колебательность при непрерывно меняющейся по амплитуде и частоте входном воздействии. Цель изобретения - повышение точности и уменьшение колебательности устройства. Поставленная цель достигается тем, что в устройстве автоматического управления инерционным объектом при ограниченном управляющем воздействии второй вход усилителя соединен с вторым входом триггера. Причем триггер содержиг последовательно соединенные второй и третьи дифференциаторы, второй сумматор, выпрямитель, третий сумматор, первый фильтр, коммутатор и второй фильтр, второй вход второго сумматора соединен с входом второго дифференциатора, третий вход - с выходом второго диф39ференциатора, второй вход третьего сумматора соединен с выходом второго сумматора , третий вход - с выходом источника опорного напряжения, первым входом четвертого сумматора и через коммутатор с первым входом пятого сумматора, второй вход которого соединен с вторым входом четвертого сумматора, а выход - с третьим входом четвертого сумматора, выход которого соединен с управляющим входом коммутатора. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - график работы устройства; на фиг. 3 -схема изменения порога срабатывания коммутатора. Устройство содержит объект Т упра ления, исполнительный орган 2, усилитель-преобразователь 3, формирователь k сигнала ошибки, первый дифференциатор 5 первый сумматор 6, триг гер 7j коммутатор 8, второй и третий дифференциаторы 9 и 10, второй 11, третий 12, четвертый 13, пятый 14 и шестой 15 сумматоры, инвертор 1б, выпрямитель 17, источник 18 постоянного напряжения, первый 19 и вто рой 20 фильтры, вентиль 21. Кроме того, приняты обозначения: Xg,y- входной сигнал, выходно сигнал, U сигнал на выходе i-ro функциоЧнального блока,22- значение сигнала U при постоянном форсирующ сигнале. (U( const) ; 23- значение сигнала U при переменном форсирующем сигнале (Unjj /аг); порог срабатывания коммутатора 8 (Ц,р); 25- уменьшенный порог срабатывания коммутатора 8 (1 , значени сигнала Ь при переменном форсирующ сигнале пороге U pсрабатывания коммутатора UQ, 27 - постоянный знакопеременный форсирующий сигнал (lL) const; 28- переменный форсирующий сигнал и( пороге срабатывания коммутатора 8 (Ur,c) ; 29 - переме ный форсирующий сигнал порог срабатывания коммутатора 8 (( . На фиг. 2 кривые 22, 23, 2, 25 26изобрах ены в координатах U(S, I кривые 27 и 28 - в координатах где .iU4+ KijUg; 4 и KS коэффициенты усиления Jn - сигнал ошибки; и с - производная сигнала ошибки ; форсиоующий сигнал. 4 На фиг. 3 по оси абсцисс отложено значение сигнала U, по оси ординат показаны линии переключения коммутатора 8, где UQP - порог срабатывания коммутатора (ОВ) ; Уд - величина сигнала Ц, на которую уменьшается порог срабатывания коммутатора .8 (аЬ);Ц - порог срабатывания коммутатора 8, уменьшенный на величину сигнала U(Oa); зона нечувствительности коммутатора 8, смещенная влево на величину Уд. Устройство работает следующим образом. Рассмотрим случай отслеживания основным контуром (блоки 1,2 и 3) гармонического воздействия Xg, в заданном диапазоне частот и амплитуд. Предварительно рассмотрим работу устройства в случае, когда на вход третьего сумматора 12 подается только постоянный сигнал Цд, сформированный источником 19 постоянного напряжения. При этом сигнал Ufg, проходя через третий сумматор 12, первый (низкочастотный) фильтр 19, в случае, если коммутатор 8 находится в несработанном состоянии, т.е. выполняется условие и K4U4+ ,p, через его второй инвертированный выход, замкнутый контакт коммутатора 8, второй (низкочастотный) .фильтр 20, попадает на второй вход исполнительного органа 2. При этом на втором входе исполнительного органа 2 формируется сигнал . При .условии коммутатор 8 переключает свои контакты, и на второй ход исполнительного органа 2 попадает сигнал . Таким образом, создается режим осцилляции на выходе объекта относительно входного воздействия Xgy, устраняющий ошибку и уменьшающий влияние нелинейностей (кривые 22 и 27 на фиг. 2). При этом, в зависимости от установленной величины U,Q возможна большая или меньшая степень перерегулирования, приводящая к неплавному движению объекта, величину Ц0 можно регулировать с помощью усиления сумматора 12. Для улучшения формы выходного сигнала необходимо величину сигнала управления изменять в зависимости от амплитуды и частоты входного сигнала, сохраняя при этом форсирующий 59 сигнал li Q const для каждого конкретного значения амплитуды и частоты входного сигнала Xaj. Для этого в устройство введены второй 9 и третий 10 дифференциаторы, сумматор 1, вып рямитель 17-В результате на выходе сумматора 12 формируется переменный сигнал и .ex+ KgXg+KjX + 0 6Х где К..,. К коэффициенты усиле -д, ния входного сигнала ) и его первых двух производных Xg коэффициент усиления на втором входе сумматора 12, Низкочастотный фильор 19 с передаточной функцией -1.„ -: --- усредняет и ограничивает сигнал Цп,обеспечивая тем самым Ццп соп51, а на выходах фильтра - сигналы +U|gU- U/л, где К|-|И Т, соответственно коэффициент усиления и постоянная времени этого фильтра.. Для более плавного воздействия на объект 1 скачкообразного знакопеременного сигнала LU, возникающего на входе исполнительного органа 2 в результате переключения коммутатора 8, сигнал пропускается через второй низкочастотный фильтр 20 с 7д тпоам где TQQ- постоянная времени низкомастотного фильтра 20. При этом объект 1 более плавно и быстро отрабатывает входной сигнал (кривые 22 и 27 на фиг. 2). Для уменьшения порога срабать1вания коммутатора 8, влияющего на качество регулирования, в устройство включен пятый сумматор 1 селектирующего типа с отрицательным выходным сигналом , содержащий инвертор 16, шестой 15 румматор и вентиль 21 пропускающий только отрицательный с нал и сумматор 13. Работа схемы поясняется диаграммой (фиг. 3).При по ложении коммутатора 8 в состоянии Выключено 43 его обмотку поступае с выхода сумматора 13 сигнал Urt K, Ug, где постоянная величина, формируемая источником 18 постоянного напряжения, на которую зона нечувствительности коммутатора 8 (Og- на фиг. З) смещается влево, тем самым уменьшая порог срабатывания LLp до заданного значения . (О-а на фиг. 3). 1 При достижении сигналом Uf, значения, равного Ц,о,коммутатор 8 срабатывает и подключает сигнал Цп на вход сумматора 15, формируя на его выходе сигнал КЛи - U(g ,гдё коэффициент усиления на первом входе сумматора 15; К - коэффициент усиления на втором входе сумматора 15В тот момент когда сигнал K;|5U(j, уменьшаясь, достигает значения U вентиль 21 открывается, и на вход сумматора 13 поступает сигнал с выхода сумматора It. С этого момента левая граница зоны нечувствительнос и (порог отпускания) начинает смещаться в исходное положение, и коммутатор 8 отключается при нулевом сигнале на его входе, т.е. при условии . Сигнал ртключается от входа сумматора 15, и зона нечувствительности сумматора скачком возвращается в смещенное состояние. В результате описанных смещений зона нечувствительности уменьшается (фиг. 3) до заданной величины U. Таким образом, форма выходногс сигнала объекта 1 управления и его качества регулирования резко улучшилась (кривые 26 и 29 на фиг. 2). Для определения значения коэффициента К и постоянного сигнала Цо при выбран ° значении Ц..рследует воспользоваться следующими соотношениями CP iVЦ& Цср У%Ж5 |11 и.гР Устройство работает аналогичным образом при входном сигнале произвольной формы. Таким образом в предлагаемом устройстве точность отслеживания входного сигнала повышается в 3- раза и 1рактически не зависит от его частогы и амплитуды, причем, при скачксюбэазном входйом воздействии степень перерегулирования объекта уменьшается в 4-5 раз. Кроме того, в рабочем диапазоне частот и амплитуд устраняется влияние нелинейности объекта на процессе регулирования. Формула изобретения 1. Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии по авт. св. № , о т л и ч а ющ е ее я тем, что, с целью повышения точности и уменьшения колебательности устройства, в нем второй 1 . вход усилителя-преобразователя соединен с вторым входом триггера. 2. Устройство по п. 1, о т л и чающееся тем, что триггер со держит последовательно соединенные второй и третьи дифференциаторы, второй сумматор, выпрямитель, третий сумматор, первый фильтр, коммутатор и второй фильтр, второй вход второго сумматора соединен с входом второго дифференциатора, третий входс выходом второго дифференциатора, второй вход третьего сумматора соеди нен с выходом второго сумматора,тре51тий вход - с выходом источника опорного напряжения, первым входом четвертого сумматора и через коммутатор с первым входом пятого сумматора, второй вход которого соединен с вторым входом четвертого сумматора, а выход - с третьим входом четвертого сумматора, выход которого соединен с управляющим входом коммутатора. Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР N° , кл. G 05 В 13/02, 05.Oi.71. (прототип).
