В ОСНОВНОМ авт- св. № 116581 описано устройство для регулирования режима работы вальцевых станков путем автоматического уиравления включением электродвигателя механизма для сближения и разведения вальцев с применением расходомеров с электрическим измерительным контуром.
Описываемое устройство для регулирования режима работы вальцевых станков обеспечивает поддержание экстремальных условий режима работы. С этой целью в устройстве применены запоминающий механизм, командоконтроллер и делительный механизм, представляющий собою автоматический потенциометр, к которому подключены генератор расходомера продукта, поступающего на регулируемую систему, и генератор расходомера извлекаемой фракции. Запоминающий механизм состоит из реверсивного двигателя, индукционного реле скорости и электромагнитного реле. Командоконтроллер выполнен в виде приводимого во вращение синхронным электродвигателем диска, на котором закреплен кулачок, взаимодействующий с расположенными на общей окружности путевыми переключателями с самовозвратом.
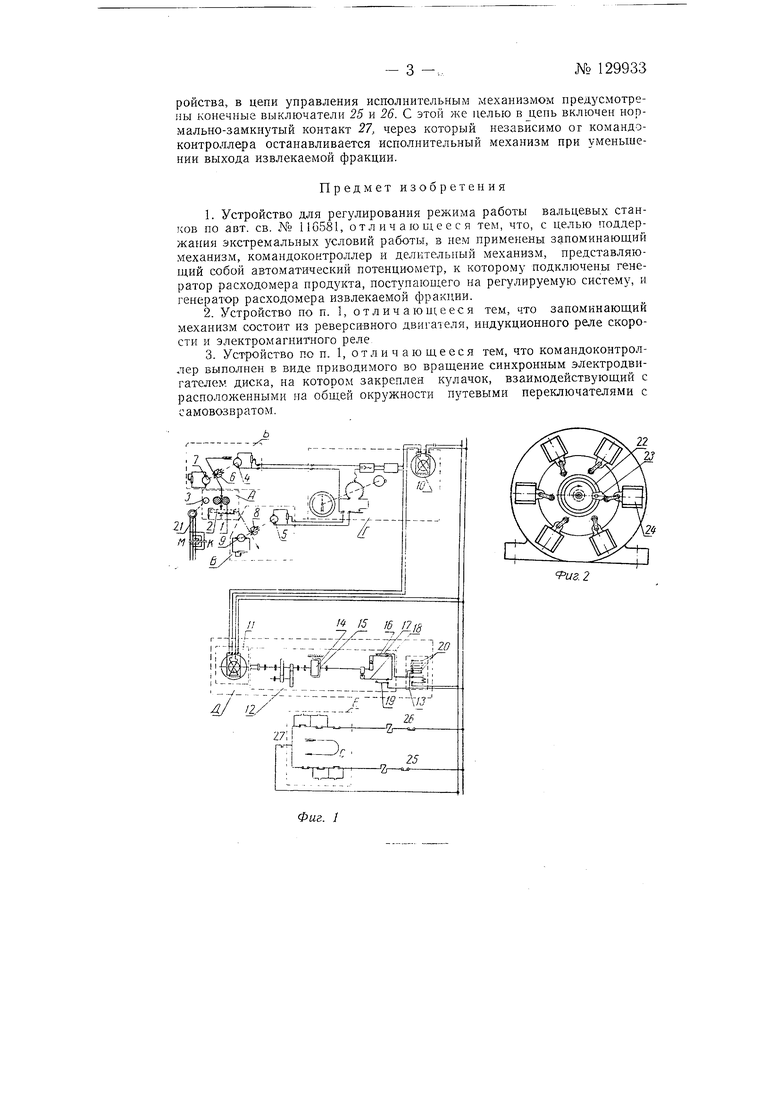
На фиг. 1 изображена схема устройства; на фиг. 2 - схема командоконтроллера.
Устройство включает: регулируемую систему А с измельчающими вальцами /, рассевом 2, исполнительным механизмом 3; два расходомера Б и В; делительный механизм Г; запоминающий механизм Л и командоконтроллер Е.
Я2,:..1:29933- 2 Делительный механизм Г представляет собою автоматический электронный потенциометр, например типа ЭПД-02, к которому вместо термопары подключен генератор 4 расходомера Б продукта, поступающего на регулируемую систему А, а вместо сухого элемента - генератор 5 расходомера В извлекаемой фракции. Напряжение бу генератора 4 подается на вход электронного потенциометра; напряжение U генератора 5 подается на вход усилителя этого потенциометра. Продукт, поступающий в регулируемую систему Л, приводит во вращение ротор 6 расходомера Б; на валу ротора 6 закреплен нагрузочный генератор 7- На валу ротора 8 расходомера В (выводящего извлекаемую фракцию) закреплен нагрузочный генератор 9. У потенциометра, включенного по такой схеме, реверсивный двигатель 10 устанавливает движок реохорда в положение, которое соответствует соотношению: - к -
.-. .
(т. е. в данном случае выходу извлекаемой фракции), где qi-расход продукта в кг/час, поступающего в систему, а qz-расход извлекаемой фракции в кг/час; таким образом, направление вращения управляемого двигателя зависит от того, в каком направлении изменяется выход извлекаемой фракции.
Запоминающий механизм Д включает в себя реверсивный двигатель //, индукционное реле 12 скорости и электромагнитное реле /. Назначение запоминающего механизма Д «запомнить, как изменился выход извлекаемой фракции после предыдущего изменения зазора между измельчающими вальцами /, и в случае его увеличения дать сигнал изменить зазор в том же направлении, а если выход уменьщился, то в обратном направлении. Реверсивный двигатель 11 подключен параллельно реверсивному, двигателю 10 делительного механизма Г. На вал двигателя // насажен постоянный магнит /4 и колпачок 15 из диамагнитного материала. В зависимости от направления вращения двигателя // колпачок /5 через рычаг 16 воздействует на нормально-замкнутый контакт 17 или через рычаг 18 i-ia нормально-разомкнутый контакт 19 в цепи катущки электромагнитного реле 13.
Электромагнитное реле 13 имеет три нормально-разомкнутых контакта 20: при замыкании нормально-разомкнутого контакта 19 реле 13 срабатывает; при этом один из контактов 20 щунтирует контакт 19, другой -- путевой переключатель стоп - М, а третий - щунтирует переключатель стоп - /С.
Исполнительный механизм 3 сближает или разводит измельчающие вальцы 1, увеличивая или ум.еньщая степень измельчения продукта; механизм 3 приводится во вращение электродвигателем 21, управляемым командоконтроллером через реверсивный магнитный пускатель. Командоконтроллер Е представляет собой диск 22, приводимый во вращение в направлении стрелки С синхронным электродвигателем (на чертеже не показан). На диске 22 закреплен кулачок 23, взаимодействующий с расположенными на общей окружности шестью путевыми переключателями 24 (типа ВК-211) с самовозвратом.
Под воздействием командоконтроллера исполнительный механизм 3 может находиться в трех положениях: сводить вальцы / в положение «мельче, разводить их в положение «крупнее или оставаться неподг ижным. Время перемещения кулачка командоконтроллера от одного к другому -путевому переключателю должно быть больще, чем длительность движения продукта от расходомера Б к расходомеру В для того, чтобы к моменту включения последующего переключателя делительный механизм Г отработал, а запоминающий механизм Д «запомнил результат предыдущего переключения.
Для предупреждения увеличения или уменьщения зазора между вальцами / выще допускаемых пределов в случае неисправности усти . ,, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования режима работы вальцевых станков | 1958 |
|
SU116581A1 |
| Позиционно-шаговой регулятор температуры | 1960 |
|
SU141020A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| РЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2352052C2 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| Судовая энергетическая установка | 1980 |
|
SU931589A1 |
| ПРИБОР ДЛЯ РЕГИСТРАЦИИ РЕЗУЛЬТАТОВ ПОКОМПОНЕНТНОГО АНАЛИЗАВСЕСОЮЗНАЯ[МТЕ111НО-ТЕХКН4ЕГНДЯI БИБЛИОТЕКА | 1970 |
|
SU286337A1 |
| КОЛОНКА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СЕРВОМОТОРОМ | 1972 |
|
SU348977A1 |
