(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ РУДНИЧНОГО ЭЛЕКТРОВОЗА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления скоростью движения рудничного электровоза | 1979 |
|
SU1004168A1 |
| Устройство для автоматического управления скоростью движения рудничного электровоза | 1980 |
|
SU939309A1 |
| Устройство для автоматического управления скоростью движения рудничного электровоза | 1980 |
|
SU998158A2 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для автоматического управления электроподвижным составом | 1977 |
|
SU716888A1 |
1
Изобретение относится к угольной промышленности и предназначено для автоматизации как единичных рудничных электровозов, так и для их автоматизации в системе автоматического вождения рудничных поездов.
Известно устройство автоматического управления скоростью движения рудничного электровоза, содержащее задатчик скорости, блок сравнения, выход которого через интегратор соединен с управляемым электроприводом, и датчики скоростей, соединенные выводами с соответствующими входами блока выделения максимальной и минимальной скорости 1.
К недостаткам устройства относятся невозможность обнаружения боксования в случае, когда сравниваемые колесные пары боксуют одинаковыми скоростями, а также полное отсутствие мероприятий, ликвидирующих или предотвращающих явление юза при условии минимального времени торможения. Кроме того, реле боксования, примененное в системе фирмы ASEA и осуществляющее защиту как по разности скоростей колесных пар, так и по их ускорению, при малых скоростях движения недостаточно эффективно из-за сложности дифференцирования медленно изменяющихся сигналов.
Цель изобретения - повышение надеж5 ности.
Поставленная цель достигается тем, что устройство снабжено релейными элементами дополнительным интегратором, дополнительным блоком сравнения, ограничителем и задатчиком ускорения, который через один
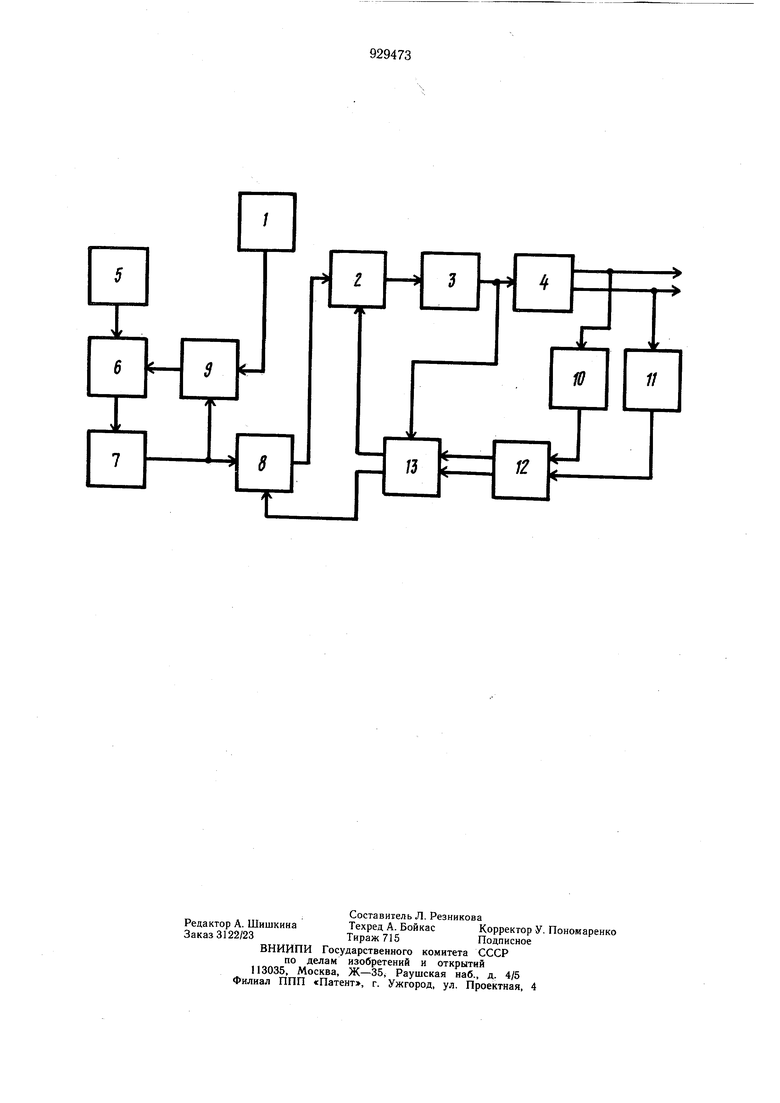
° из релейных элементов и дополнительный интегратор соединен с одним из входов ограничителя и одним из входов дополнительного блока сравнения, другой вход которого подключен к задатчику скорости, а выход - к упомянутому релейному элементу, при этом другой вход ограничителя соединен с одним из выходов другого релейного элемента, подключенного входами соответственно к выходам блока выделения максимальной и минимальной скорости и выходу интегратора, а другим выходом - к одному из выходов блока сравнения, другой вход которого соединен с выходом ограничителя. На чертеже приведена функциональная схема устройства.
Устройство содержит задатчик 1 скорости, блок 2 сравнения, выход которого через интегратор 3 соединен с управляемым электроприводом 4, задатчик 5 ускорения, который через релейный элемент 6 и дополнительный интегратор 7 соединен с одним из входов ограничителя 8 и одним из входов блока 9 сравнения. Устройство содержит также датчики 10 и 11 скорости, соединенные с входами блока 12 выделения максимальной и минимальной скорости, выходы которого подключены к релейному элементу 13.
Принцип действия устройства следующий.
Сигнал задатчика 1 скорости, управляемого, например, от приемника, установленного при автовождении на электровозе, служит информацией к движению электровоза, к переходу с одной стороны на другую и, при соответствующих условиях, к переводу аппаратуры управления приводом в режим динамического торможения.
Разгон, торможение, а также переход с большей скорости на меньшую и наоборот, т. е. при изменении уставки по скорости, производится по временной программе, реализуемой дополнительным интегратором 7. Для этого сигналы с задатчика 1 скорости и, интегратора 7 сравниваются в блоке 9 сравнения. Разность между ними управляет двухпозиционным релейным элементом 6, который переключает выход с задатчика 5 ускорения таким образом, что при положительной полярности сигнала с блока 9 сравнения на вход дополнительного интегратора 7 поступает сигнал о разгоне или увеличении скорости, а при отрицательной полярности поступает сигнал о уменьщении скорости и торможении. Величина задаиия ускорения и замедления выбирается по условию минимального времени разгона и торможения без боксования и юза в наиболее благоприятных условиях движения: сухие рельсы, на прямолинейном горизонтальном участке, при свежезаряжанной батарее у аккумуляторных электровозов.
Поскольку функциональная цепь интегратор 7 - блок 9 сравнения - первый релейный элемент 6 является замкнутой системой, релейный элемент б после каждого изменения по скорости в больщую или меньшую сторону и отработки рассогласования системой управления, а также в случае саморазряда интегратора 7. автоматически возвращается в состояние выхода - увеличение скорости, благодаря чему при наличии внутренних потерь - энергии в системе, осуществляется подпитка.
Выходной сигнал интегратора 7 поступает на ограничитель 8 напряжения, куда также поступает наименьший яри разгоне или наибольший при торможении сигнал с датчиков 10 и 11 скорости. Ограничение производится таким образом, что напряжение
на интеграторе 7 не может превысить при разгоне сигнал датчика, измеряющего в данный момент наименьщую скорость колесной пары, а при торможении или снижении скорости не может быть меньще наибольшей из двух скоростей колесны,х пар.
Сформированный таким образом сигнал задания мгновенной скорости движения с ограничителя 8 поступает на блок 2 сравнения, в котором он сравнивается при разгоне
(торможении) с большим (меиьщим) из двух сигналов датчиков 10 и 11 скоростей колесных пар.
Сигнал рассогласования скоростей подается на интегратор 3, который воздействует на управляемый двухдвигательный привод 4 рудничного электровоза, причем знак выходного сигнала интегратора 3 характеризует режим движения или торможения. Для определения большей и меньщей из двух скоростей колесных пар служит блок 12, два выхода с которого поступают на релейный элемент 13, который управляется выходным сигналом интегратрра 3. При положительном сигнале с интегратора 3 (разгон и установивщееся движение) релейный элемент 13 осуществляет подачу на элемент
2 сравнения сигнала наибольшей скорости, и на ограничитель 8 - наименьшей, а при отрицательном сигнале интегратора 3 (уменьшение скорости и торможение) - наоборот: на ограничение - сигнал большей скорости и на сравнение - сигнал меньшей
скорости. Указанная операция производится для того, чтобы при разгоие и движении с установившейся скоростью, когда может возникнуть явление боксования, выявить наиболее боксующую колесную пару, а при уменьшении скорости и торможении, когда может возникнуть явление юза, выявить наиболее юзующую колесную пару. Таким образом, в режимах разгона и торможения, а также при увеличении или уменьщении установки скорости, с заданной мгновенной
скоростью сравнивается скорость колесной пары, имеющая наибольшее отклонение от заданной, что существенно снижает время восстановления системы на заданный режим движения, а также обеспечивает управление скоростью электровоза с полной ликвидацией боксования и юза.
Сигнал с дополнительного интегратора 7 корректируется при разгоие сигналом меньщей скорости колесной пары, а при уменьщении скорости и торможении - сигналом
больщей скорости колесной пары, т. е. при разгоне осуществляется ограничение сигнала дополнительного интегратора 7. При возникновении боксования обеих колесных пар системой управления, благодаря обратной связи по скорости, вырабатывается сигнал
На уменьшение скорости до тех пор, пока одна из двух колесных пар не приобретет фактическую скорость электровоза. При этом интегратор 7 с момента равенства его
сигнала сигналу наименьшей скорости колесной пары следит за этим сигналом до тех пор, пока на другой колеской паре не прекратится боксование и скорости колесных пар не уравняются. В этот момент напряжение интегратора 7 соответ-етбует фактической скорости электровоза, т. е. к концу процесса боксования и возобновлению разгона с заданным ускорением автоматически осуществляется «привязка программы движения во времени к фактической скорости движения электровоза. При уменьшении уставки по скорости и при торможении, когда возникло явление юза, заданная программа движения осуш,ествляет слежение уже за наибольшей из двух скоростей колесных пар (с момента равенства сигнала интегратора 7 наибольшему сигналу датчиков), т. е. осуществляет слежение за фак тической скоростью электровоза, когда другая колесная пара еще находится в состоянии юза.
Таким образом, на всех режимах движения электровоза предлагаемое устройство осуществляет автоматическое слежение за фактической скоростью электровоза и измерение ее без наличия так называемой прицепной колесной пары, применение которой в условиях эксплуатации подземного транспорта нецелесообразно и практически трудно выполнимо: во-первых, стесненность в расположении оборудования на электровозе не позволяет установить датчик истинной скорости между осями электровоза, и, вовторых, датчик, установленный снаружи, из-за незначительной межосевой базы рудничных электровозов и из-за малых радиусов закруглений путей, может быть неработоспособным ввиду схода с рельс измерительного колеса.
Введение дополнительно задания по ускорению и новых элементов (задатчика ускорения, релейных элементов, интегратора, ограничителя, элемента сравнения) позволяет повысить приспособляемость системы управления к внешним возмущениям и формирование соответствующих управляющих воздействий в зависимости от изменения уклона пути, условии сцепления колес с рельсами, величины груза в прицепном составе, а также предельных возможностей тягового привода, ликвидировать проскальзывание и юз колесных пар. Во всех указанных случаях с помощью соответствующей коррекции временной программы разгона или торможения предлагаемая система управления выбирает наиболее оптимальный вариант движения.
Формула изобретения
Устройство автоматического управления скоростью движения рудничного электровоза, содержащее задатчик скорости, блок
сравнения, выход которого через интегратор соединен с управляемым электроприводом, и датчики скоростей, соединенные входами с соответствующими входами блока выделения максимальной и минимальной
скорости, отличающееся тем, что, с целью повышения надежности, оно снабжено релейными элементами, дополнительным интегратором, дополнительным блоком сравнения, ограничителем и задатчиком ускорения, который через один из релейных элементов и дополнительный интегратор соединен с одним из входов ограничителя и одним из входов дополнительного блока сравнения, другой вход которого подключён к задатчику скорости, а выход - к упомянутому рел.ейному элементу, при этом другой вход ограничителя соединен с одним из выходов другого релейного элемента, подключенного входами соответственно к выходами блока выделения максимальной и минимальной скорости и выходу интегратЧ)ра, а другим
выходом - к одному из выходов блока сравнения, другой вход которого соединен с вы-, ходом ограничителя.
Источники информации, принятые во внимание при экспертизе I. Андрее Пунар. Управляемый преобразователь для рудничных локомотивов постоянного тока. Journal, 1974, т. 47, № 6, с. 137-143.
