Изобретение относится к электротехнике, а именно к управлению группой асинхронных короткозамкнутых двгателей с ограниченным доступом к валу.
Цель изобретения - повьшение точности поддержания частоты вращения электродвигателей.
На фиг.1 показана функциональная схема частотно-регулируемого многодвигательного электропривода; на фиг.2 - функциональные схемы датчик ЭДС, узла сравнения, регулятора напряжения; на фиг.З - временные диаграммы, поясняющие принцип работы устройства.
Многодвигательный электропривод содержит п асинхронных двигателей 1.1, 1.2, ..., 1.п, инвертор 2, ис
точник 3 задающего сигналаj выход ко торого подключен ко входу задания узла сравнения 4. Два вывода электродвигателей 1.1, 1.2, ..,, 1.п пофазн объединены и подключены к соответствующим двум фазным выводам инвертора 2. Электропривод снабжен п регуляторами напряжений 5.1,5.2, .., 5.П, п датчиками ЭДС 6.1, 6.2,..., 6.П, генератором эталонной частоты 7, а узел сравнения 4 выполнен с п информационными входами и п выходами Управляющий вход инвертора 2 соединен с выходом блока управления 8, вход которого соединен с источником 3 задающего сигнала. Одни входы 9.1, 9.2, ,..j 9.П датчиков ЭДС подключены к третьим выводам асинхронны двигателей 1.1, 1.2, ..., 1.п. Вторы входы 10.1, 10.2, ..., 10.11 указанных датчиков ЭДС объединены и соединены с выходом генератора эталонной частоты 7.
Выходы 11.1, 11.2, ..., 11.п датчиков ЭДС подключены к информационным входам узла сравнения 4, выхода 12,1, 12.2, ..., 12.П которого подключены к управляющим входгш регуляторов напряжении 5.1, 5.2, ..., 5.п. Входы 13.1, 13.2, ..., 13.П указанных регуляторов соединены с третьим фазным выводом инвертора, а выходы 14.1, 14.2, ..., 14.П регулятора напряжений 5.1, 5.2, ..., 5,п соединены с третьим фйзньм йьгеодом асинхронных двигателей 1.1,1,2, ..., 1 ,п соответств.енно. Вход 15 является входом задания узла сравнения.
10
15
20
25
Функциональная схема датчика 6.1 ЭДС вращения двигателя содержит нуль- орган 16 (фиг.2), схему 17 совпадения, R-S-триггер 18, элемент 19 за5 держки, преобразователь 20 частоты в : двоичный код, оперативное запоминающее устройство 21; функциональная схема узла 4 сравнения содержит двоичные сумматоры 22.1, 22,2, ..,,22.п, а регулятор 5.1 напряжения содержит оперативное запоминающее устройство 23, преобразователь 24 код-угол, генератор 25 тактовой частоты, буферный усилитель 26, полупроводниковый коммутатор 27.
На фиг.З обозначены: 28 - ЭДС вращения двигателя; выходной сигнал нуль-органа 16; 30 - сигнал на выходе R-S триггера 18; 31 - сигнал на выходе генератора 7 эталонной частоты; 32 - сигнал на выходе схемы совпадения; 33 - сигнал на выходе преобразователя 20 частоты в двоичный код 34 - диаграмма работы преобразователя 24 код-угол; 35 - сигнал на выходе преобразователя 24 код- угол; отражающий информацию о требуемом угле открытия полупроводникового коммутатора 27 регулятора 5,1 напряжения; 36 - фазное напряжение инвертора 2; 37 - фазное напряжение двигателя 1.1 после регулятора 5.1 напряжения; 38,1 и 38.2 - начало измерительного интервала; 39.1 и 39.2 - окончание измерительного интервала, 40 - сигнал, соответствующий двоичному коду, пропорциональному текущему значению частоты вращения; 41 - сигнал, пропорциональный полному заполнению счетчика 1, где m - число разрядов; 42 - сигнал изменения кода на выходах реверсивного счетчика преобразователя 24 код - угол; 43 - тактовые интервалы работы
- регулятора 5.1 напряжения.
Устройство работает следующим образом.
С выходов источника 3 задающего сигнала на вход блока 8 управления
0 инвертором поступает сигнал, пропорциональный требуемой частоте питания статоров асинхронных двигателей 1.1, 1.2,..., 1,п, а на йход узла 4 сравнения - сигнал в виде двоичного
55 кода, пропорциональный требуемой частоте вращения асинхронных двигателей 1.1, 1.2, ..., 1.п. Далее работу устройства рассм;отрим на примере управ30
35
40
ления одним двигателем. В узле 4 внения происходит сравнение двоичных кодов, соответствующих текущему и заданному значениям частоты вращения. Измерение частоты вращения производится путем кратковременного отключения одной фазы каждого двигателя по сигналу задания от источника 3 задающего сигнала на время, равное р.Т, где р - число пар полюсов асинхронного двигателя 1.1J Т - период выходной частоты инвертора (интервалы 38.1 - 39.1, 38.2 - 39.2 фиг.З). При этом регулятор напряжения 5.1 запирается и ЭДС вращения 28 (фиг.З) поступает на вход 9.1 нуль-органа 16, В моменты перехода ЭДС через ноль формируются импульсы 29 (фиг.З), ко- ToiM.ie с помощью R-S триггера 18 преераобразуются в сигнал 30, соответствую-20 дающего сигнала. Цифровой принцип
щий полупериоду ЭДС вращения двигателя 1.1. Одновременно на выходе схемы совпадения 17 с помощью импульсов генератора 17 эталонной частоты, поступающих на ее вход 10.1 формируется 25 сигнал 32 в виде пачки импульсов, которая поступает на входы преобразователя 20 частоты в двоичный код, и по окончании измерительного интервала в виде двоичного кода переносится в 30 оперативное запоминающее устройство 21. При этом элемент задержки 19 служит для согласования перезаписи кодов. Сигнал с выходов оперативного запоминающего устройства 21 поступает35 на входа цифрового двоичного сумматора 22.1, где происходит его сравнение с задающим сигналом по входу 15 от источника 3 задающего сигнала. В результате сравнения формируется сиг-40 нал 40, соответствующий отклонению частоты вращения двигателей от заданного значения. С выходов, узла 4 сравнения сигнал поступает на входы оперативного запоминающего устройства 2345 регулятора напряжения 5.1 и далее на входа преобразователя 24 код - угол, в котором на каждом тактовом интервале 43 и формируется сигнал 35 в виде импульсов регулируемой длительности, 50 путем формирования линейноспадающего кода 42 от максимального уровня сигнала 41 до уровня сигнала 40, пропорционального текущему отклонению частоты вращения асинхронного двигателя 55 1.1. Импульсы регулируемой длительности 35 через, буферный усилитель 26 управляют полупроводниковым коммута0623 4
тором 27, который модулирует выходное.
фазовое напряжение 36 инвертора 2, при этом фазное напряжение двигателя имеет вид 37. В моменты измерительных
интервалов 38.1 - 39.1; 38.2 - 39.2 напряжение питания двигателя отключается, и в фазе двигателя генерируется ЭДС вращения.
Таким образом, в устройстве для
управления частотно-регулируемом мне- годвигательном электроприводе стабилизация частоты вращения в заданной точке осуществляется с помощью асимметричного параметрического регулирования. Переход на другую скорость, а также пусковые процессы реализуются при изменении выходной частоты инвертора по сигналу задания частоты вращения двигателя от источника 3 запостроения данного устройства позволяет получить точность стабилизации частоты вращения в многодвигательном электроприводе .
Применение данного устройства особенно эффективно для высокоскоростных электроприводов с ограниченным доступом к валу двигателя и. для приводов, работакнцих в агрессивных средах, так как не требует применения дополнительных датчиков скорости , а также сокращает число проводников от двигателя к устройству.
Формула изобретения
Многодвигательный электропривод, содержащий п асинхронных двигателей, инвертор, блок управления, выходом подключенный к управляющему входу инвертора, а входом - к выходу источника задающего сигнала, соединенному с входом задания узла сравнения, отличающийся тем, что, с целью повышения точности стабилизации частоты вращения, введены п регуляторов напряжения, п двухвходовых датчиков ЭДС, генератор эталонной частоты, а узел сравнения выполнен с п информационными входами и п выходами, причем два вывода асинхронных двигателей объединены пофазно и подключены к соответствующим двум фазным выводам инвертора, третий фазный вывод которого подключен к силовым входам регуляторов напряжений, зыход каждого из которых подключен
51301)6236
к третьему выводу асинхронного дви- ка ЭДС нодключея к соответствующегп гателя и одному входу датчика ЭДС, информационному нходу узла сраине- другие входы датчиков ЭДС объединены ния, выход которого СОПДИНРН с упряв- и соединены с выходом генератора эта- ляющнм входом одного из регулятч роп лонной частоты, выход каждого датчи- g напряжений.
фие. I
25
г§
30 3 J2 33 ЗФ
J5 JF
37
lilli
шшили
лшжишишж
1-:1
1
JlllLtMijllt
tiniil , ,
W 42
t
ОДППП
шш
Ч-Ры Ы-А -Р-V/ L
Составитель В.Тарасов Редактор И.Сегляник Техред М.Ходанич Корректор Т.Колб
Заказ 1158/55Тираж 661 .Поднисное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д, 4/5
JlllLtMijllt
tiniil , ,
W 42
шш
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4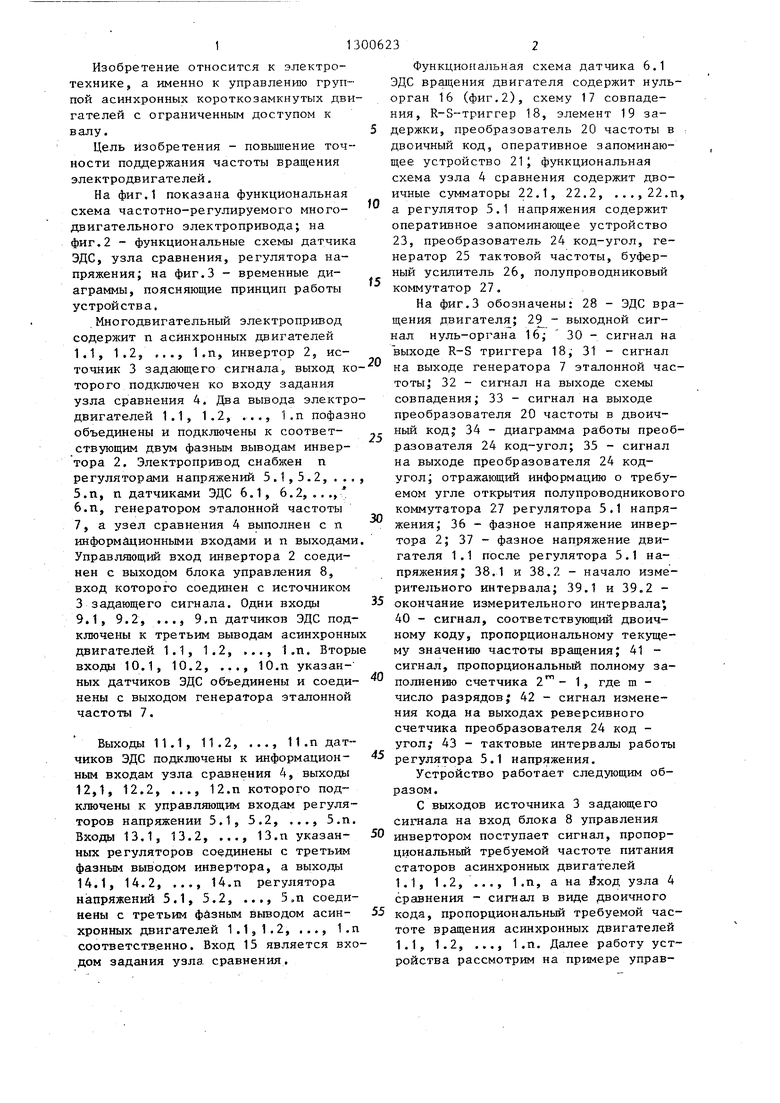
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Частотно-регулируемый электропривод | 1987 |
|
SU1434530A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| Способ управления многодвигательным электроприводом | 1984 |
|
SU1259464A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |

Изобретение относится к электротехнике. Целью изобретения является повышение точности стабилизации частоты вращения. Указанная цель достигается введением в многодвигательный электропривод датчиков 6.1, 6.2... 6,п ЭДС, регуляторов 5.1,5.2 ..5.п напряжений, генератора 7 эталонной частоты и выполнением узла 4 сравн 7 ния с п информационными входами и п выходами. Стабилизация частоты вращения осуществляется с помощью асимметричного параметрического регулирования. Переход на другую скорость и пусковые процессы осуществляется изменением выходной частоты напряжения инвертора 2 по сигналу задания частоты вращения от источника 3 задающего сигнала. 3 ил. « (Л О5 Ю СО Фиг.1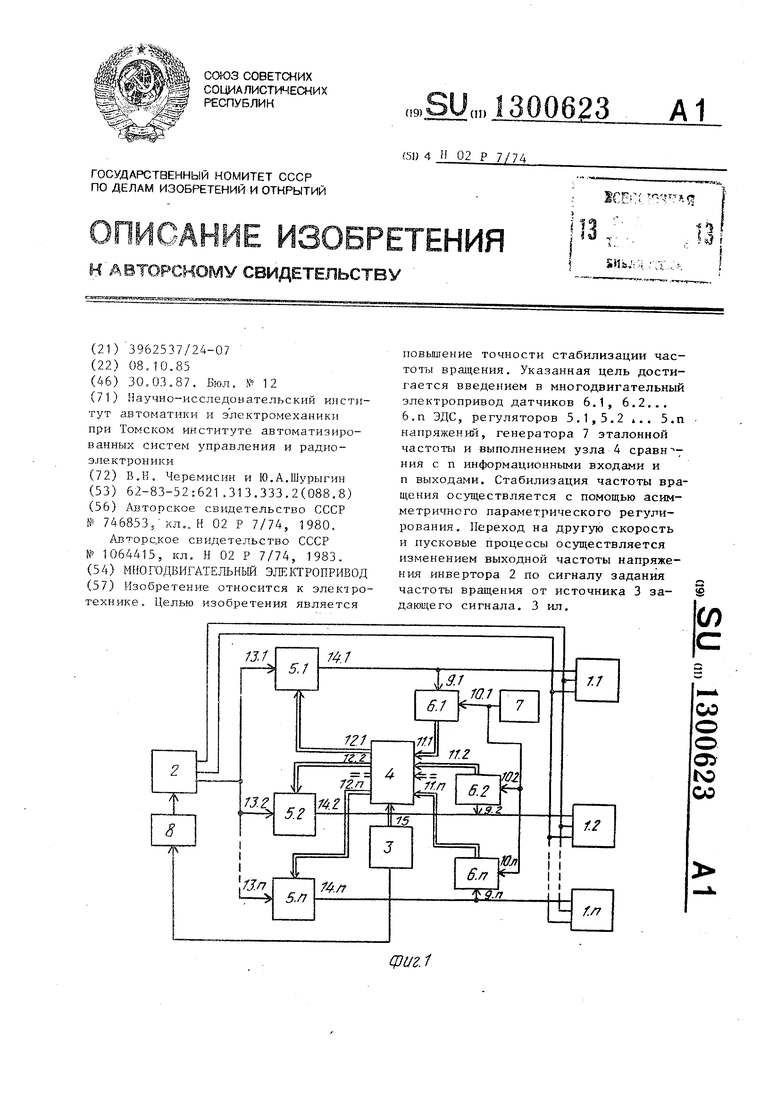
| Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе | 1977 |
|
SU746853A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
