(54) УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ЗАДАННОГО
: СООТНОШЕНИЯ СКОРОСТЕЙ в МНСГОШИГАТЕЛЬНОМ
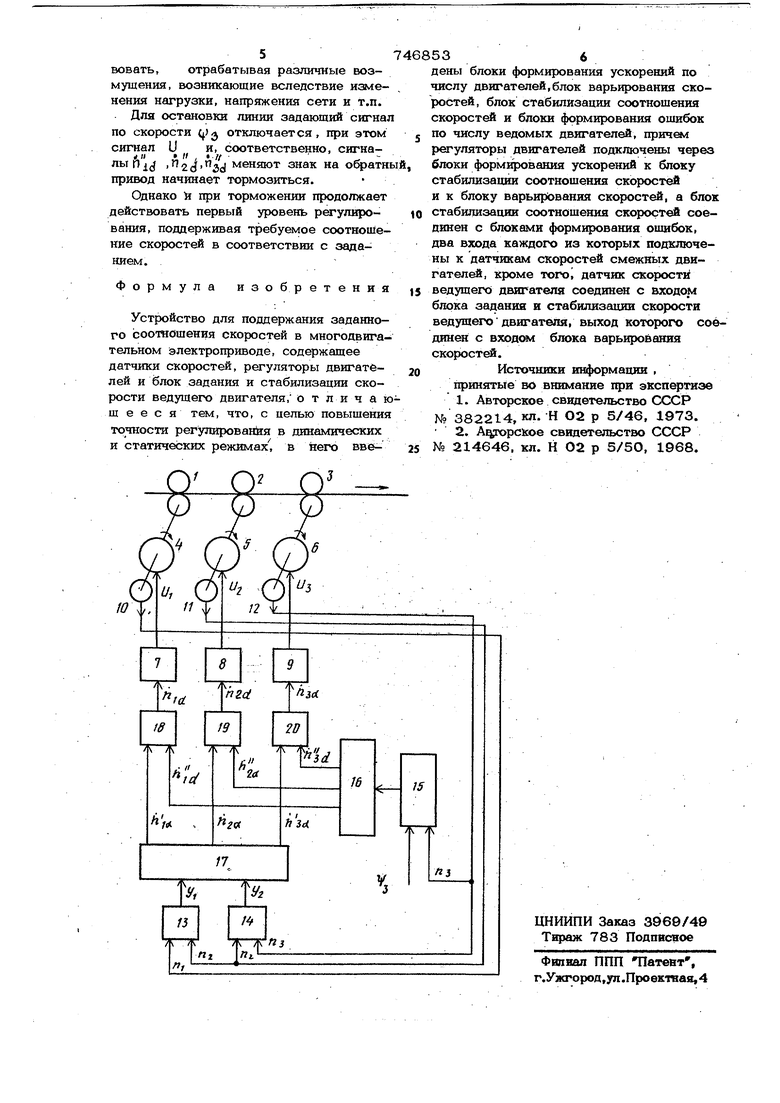
;ЭЛЕКТРОПРИВОДЕ Изобретение относится к эпейтротехн ке и может быть использовано в системах регулирования скорости линий для производства многослойных полимерных пленок. Известно устройство для регулирования скорости электродвигателя постоянного тока многодвигательного привода агрегата непрерывной обработки пленочного материала, содержащее задатчик скорости, к выходу которого подключен регулятор скорости с компаундирующей обратной связью по нагрузке двигателя, включенной на вход регулятора скорости Для поддержания заданного соотношения скоростей в таком устройстве в контур компаундирования по нагрузке электродвигателя включен корректор, второй вход которого подключен к выходу за- датчика скорости двигателя Недостатком такого устройства является низкая точность поддержания соо ношения скоростей электродвигателей пр изменении скорости агрегата/ Наиболее близким.к предложенному устройству по технической сущности является устройство, содержащее связывающие блоки, регуляторы двигателей и датчики скоростей с параллельно подключенными потенциометрами, на выходе которых через связующие блоки, образованные последовательно включенными делителями напряжения, подсоединены входы регуляторов двигателей 2. Недостатком этого устройства является значительная динамическая ошибка возникающая в процессе регулирования и при переводе линии на другую скорость, а также в установившемся режиме работы приводов в случае отработки возмущающих воздействий. Цель Изобретения - повышение точности регулирования в динамических и статических режимах. Это достигается тем, что применена двухуровневая система регулирования, содержащая блоки формирования ускорений по числу двигателей , блок варьирования с5ко1эостёй, блок стабилизации соотношени скорЬстей и ёлоки формирования ошибок по числу ведомых двигателей, щэичем ре гуляторы двигателей подключены через блоки формирования ускорений к блоку стабилизации соотношения скоростей и к блоку варьирования скоростей, а блок стабилизация соотношения скоростей соединен с блоками формирования ошибок, два входа каждого из которых подключен к датчикам скоростей смежных двигатеV ПЛ Г-ТГ1Х Л Л / ЧУ -1ГЧ/- 1 П 1Й T-v nnvvv /NiMn лей. Кроме того, датчик скорости ведущего двигателя соединен с входом блока задания и стабилизации скорости ведущего двигателя, выход которого соединен с входом блока варьирования скоростей. На чертеже изображена бтук- С Ша устройства, которое в данном случае исЬользуется в многодвигательной технологической линии для обработки гибкого материала между валками. Текущие пары валков 1, 2, 3 приводятся во вращение приводами с двига. телями 4, 5, 6, на которые подаются напряжения U ,(2 Из от регуляторов 7, 8, 9 вращающего момента, выполненных на основе тиристорньтх преобразователей . СкоростЕ-ь вращения каждого Д1зигателя измеряется датчиками 10, 11 12 скорости. Сигналы датчиковскоростисмежных двигателей .П, П2 , И tig поступают соответственна на входы блоков 13, 14 формирования ошибок, представляюших собой операшюнные усилители с аналоговым суммированием двух сигналов на входе. Кроме этогЬ, сигнал по сКорос-ки ведущего .двигателя ( в дан ном случае третьего) и задающий сигнал , определяющий скорость ведущего двигателя, и, следовательно, всей линии, подаются на вход блока 15 задания и стабилизации скорости ведущего двигателя, который формирует ошибку по скорости ведущего двигателя. Выходной сигнал I блока 15 регистрируется блоком 16.варьирования скоростей, представд ающего собой три усилителя с общим входным сигналом. Одновременно Ьигналы рассогласоваНИИ по скорости смежных двигателей и Ljg с выхода блоков 13, 14 поступают на входы блока 17 стабилизации соотношения скоростей. Он необходим для стабилизации заданных соотношений между скоростями двигателей nyTOvi измен аия их ускорений и представляет собой три операционных усилителя, на которых среднизй алгебраически суммирует на 53 входе два сигнала. На выходе блока 17 вырабатываются сигналы, пропорциональные ускорениям двигателей п .nadliojjj , необходимым для достижения требуемого соотношения скорюстей между ними. Эти сигналы поступают на блоки фор мирования ускорений двигателей 18, 19, 20, На эти же блоки соответственно поступают -сигналы, пропорциональные требу&лъш ускорениям двигателей п ({, . / j . -. .ngj-j . , которые необходимы, для достижения всеми двигателями скорости ведущего двигателя. При этом скорости остальных двигатели устанавливаются в требуемой сротношении независимо от величины скорости ведущего привода. Указанные сигналы ускорений алгебраически суммируются блоками 18-20 формирования ускорений. Последние вырабатывают требуемые сигналы ускорений п j , ЭсГ подают их на вход соответствующих регуляторов двигателей. Устройство работает следующим образом.... При включении сигнала задания (2 на выходе блока 15 появляется сигнал U, который поступает на вход блока 16, на выходе которого появляются сигналы njj . : Эти сигналы поступают в блоки 18, 19, 20. Пока двигатели не вращаются, скорости их равны нулю и выходные сигналы блоков 18, 19, 20, равные Пjjj , п2с .lad подаются на входы регуляторов 7, 8, 9, управлшощих двигателями 4, 5, 6. Двигатели начинают разгоняться. При этом, как правило, не выдерживаются требуемые соотношений скоростей и, следовательно, на выходе блоков 13 и 14 появляются ошибки регулирования у и у 2 , Сигнал ошибок регулирования поступают на вход блока 17.,: В блоке 17 формируются сигналь: П,, ud соответствующие требуемым ускорениям, направленным на поддержание заданного Соотношения скоростей. При этом вступает -в работу первый уровень регулирования. Сигналы с выхода блока 17 попадают на входы блоков 18, 19, 20, где суммируются с управляющими сигналами П| - -- 26 При этом происходит двухуровневое регулирование, причем регулирование на втором уровне выйвано изменением скорости ведущего двигателя. После разгона многодвигательного привода до установившейся скорости оба уровня регулзеЕрования продолжак)т зействовать, отрабатывая различные возмущения, возникающие вследствие изменения нагрузки, напряжения сети и т.п. Для остановки линии задающий сигна по скорости ()-j отключается, при этом сигнал и и, соответственно, сигналы 2cl 3d знак на офатн привод начинает тормозиться. Однако и при торможении продолжает действовать первый уровень регулирования, поддерживая требуемое соотношение скоростей в соответствии с заданием. Формула изобретения Устройство для поддержания заданного соотношения скоростей в многодвигательном :электроприводе, содержащее датчики скоростей, регуляторы двигателей и блок задания и стабилизации скорости ведущего двигателя, о т л и ч а i щ е е с я тем, что, с целью повышения точности регулирования в динамических и статических режимах, в него введены блоки формирования ускорений по числу двигателей,блок варьирования скоростей, блок стабилизации соотношения скоростей и блоки формирования ошибок по числу ведомых двигателей, причем регуляторы двигателей подключены через блоки формирования ускорений к блоку стабилизации соотношения скоростей и к блоку варьирбвания скоростей, а блок стабилизации соотнощения скоростей соединен с блоками формирования ошибок, два входа каждого из которых подключены к датчикам скоростей смежных двигателей, кроме Torol датчик скорости ведушехх) двигателя соединен с входом блока задания и стабилизации скорости ведущего двигателя, выход которого соединен с входом блока варьирования скоростей. Источники информации i принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 382214, кл. Н 02 р 5/46, 1973. 2. Aj iropckoe свидетельство СССР № 214646, кл. Н О2 р 5/5О, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе | 1983 |
|
SU1077040A2 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Устройство для стабилизации соотношения натяжения движущегося материала в зонах многодвигательной технологической линии | 1982 |
|
SU1062159A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Многодвигательный электропривод | 1983 |
|
SU1104632A1 |
| Многодвигательный электропривод | 1985 |
|
SU1300623A1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| Устройство для энергосберегающего управления воздушными и тепловыми потоками тягодутьевого механизма промышленного котлоагрегата | 2017 |
|
RU2707097C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
