Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потребляемого тока статора при питании асинхронного электродвигателя от преобразователя частоты.
Известен электропривод переменного тока, содержащий асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания модуля тока намагничивания, регуляторы фазных токов намагничивания, блок расчета сигналов задания тока намагничивания, блок задания частоты вращения поля статора, блок коррекции задания на ток намагничивания, блок расчета скольжения двигателя для коррекции параметров регуляторов фазных токов намагничивания [1].
Недостатками данного устройства являются сложность и малая точность адаптивных регуляторов фазных токов намагничивания, параметры которых изменяются при изменении скольжения, а также большая погрешность вычисления угла между моментообразующими векторами, обусловленная температурным дрейфом параметров двигателя.
Наиболее близким к изобретению по технической сути и достигаемому результату является электропривод переменного тока, содержащий асинхронный двигатель, трехфазный инвертор с ШИМ-регулятором тока, два датчика тока статора, с помощью которых реализуются обратные связи по фазным токам статора, датчик скорости, установленный на валу двигателя, с помощью которого реализуется обратная связь по скорости, регулятор скорости, блок расчета задания на момент двигателя, блок расчета задания модуля тока статора, блок задания фазных токов статора, блоки расчета фазных потокосцеплений ротора, блок расчета скольжения, блок задания частоты вращения поля статора, блок коррекции задания момента двигателя, с помощью которого формируется модуль вектора тока статора, в котором корректирующий сигнал определяется путем сравнения заданного и рассчитанного угла между векторами тока статора и потокосцепления ротора, и суммируется с сигналом задания на момент двигателя [2].
Недостатками данного устройства являются сложность и малая точность адаптивных блоков расчета фазных потокосцеплений ротора, параметры которых изменяются при изменении скольжения, что снижает точность расчета требуемого сигнала коррекции.
Целью изобретения является упрощение и повышение работоспособности электропривода, минимизация тока статора за счет построения системы коррекции напряжения, осуществляющей выработку корректирующего сигнала в функции более просто определяемого параметра - тангенса угла между векторами тока и эдс статора, вычисляемого на основании измеренных мгновенных значений фазных токов статора и заданных значений фазных напряжений статора двигателя.
Предлагаемый электропривод переменного тока содержит трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум обмоткам статора асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулирования, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания, амплитудный вход которого, соединен с выходом первого сумматора, выходы двух датчиков фазного тока статора соединены с входами другого сумматора фазных токов статора, а также соединены с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между векторами тока статора и другой переменной статора, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов блока вычисления параметра взаимной ориентации векторов, выход блока расчета параметра взаимной ориентации векторов соединен с отрицательным входом блока сравнения параметра взаимной ориентации векторов, положительный вход которого соединен с блоком задания параметра взаимной ориентации векторов, а выход блока сравнения параметра взаимной ориентации векторов подключен к входу блока коррекции сигнала управления, амплитудным значением гармонических сигналов задания является напряжение, вектором другой переменной статора является вектор эдс статора, а параметром взаимной ориентации между векторами тока и эдс статора является тангенс угла между этими векторами, выход блока коррекции сигнала управления соединен с одним входом первого сумматора, со вторым входом которого соединен амплитудный выход блока задания сигналов управления, частотный выход которого соединен с частотным входом блока формирования мгновенных значений гармонических сигналов задания, фазные выходы которого также соединены со вторыми фазными входами блока расчета параметра взаимной ориентации между векторами тока и эдс статора.
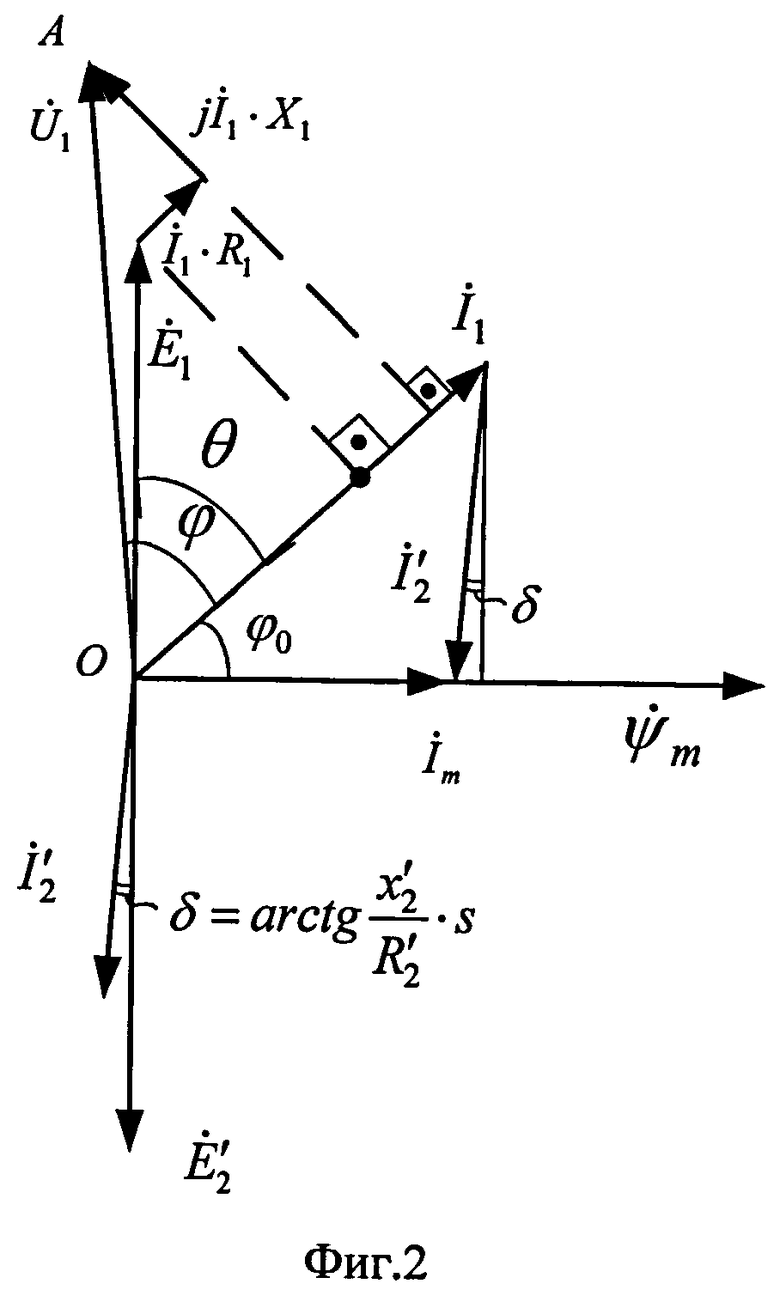
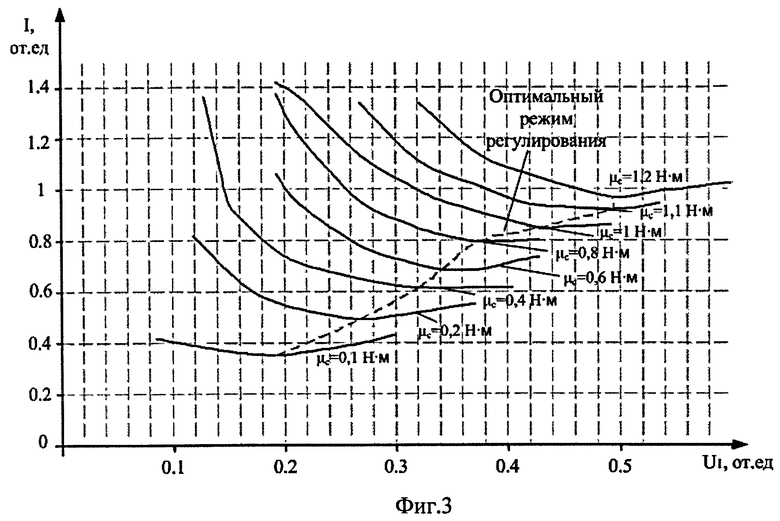
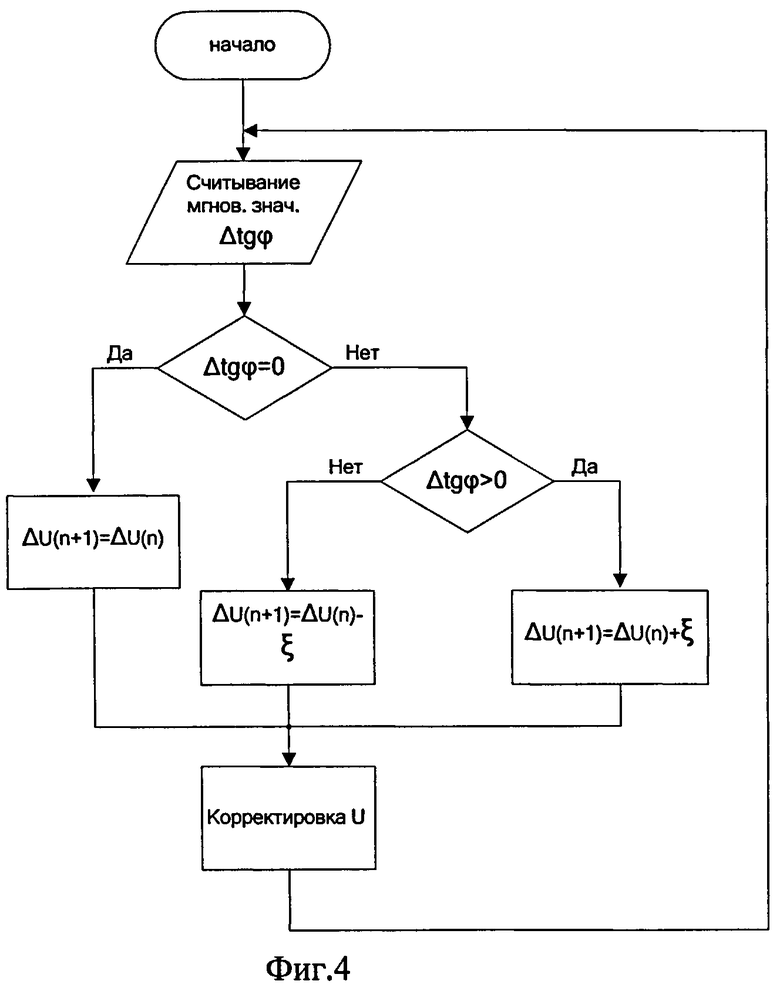
На фиг.1 приведена функциональная схема электропривода переменного тока; на фиг.2 приведена векторная диаграмма асинхронного двигателя для определения тангенса угла между векторами тока и эдс статора tgθ; на фиг.3 приведены экспериментальные графики зависимостей тока статора от напряжения при разных фиксированных значениях статического момента на валу двигателя; на фиг.4 приведен алгоритм расчета сигнала коррекции напряжения.
Электропривод переменного тока содержит инвертор 1, два силовых выхода которого соединены через датчики тока 2 и 3 с двумя обмотками статора асинхронного двигателя 4, а третий выход инвертора 1 соединен с третьей обмоткой статора двигателя 4 напрямую. Управляющие входы инвертора 1 соединены с выходами блока ШИМ-регулирования 5, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания напряжения 6. Блок задания сигналов управления напряжением питания двигателя 7 содержит амплитудный и частотный выходы, причем его частотный выход соединен напрямую с частотным входом блока формирования мгновенных значений гармонических сигналов задания 6, а амплитудный выход блока задания сигналов управления 7 соединен с одним входом сумматора 8, выход которого соединен с амплитудным входом блока формирования мгновенных значений гармонических сигналов задания напряжения 6. Выходы датчиков тока 2, 3 соединены с отрицательными входами сумматора тока 9, а также с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между вектором тока статора и током намагничивания 10, еще с одним фазным входом которого соединен выход сумматора тока 9. Выходы блока формирования мгновенных значений гармонических сигналов задания напряжения 6 соединены со вторыми фазными входами блока расчета параметра взаимной ориентации между векторами тока и эдс статора 10, выход которого соединен с отрицательным входом блока сравнения 11. Блок задания тангенса угла между векторами тока и эдс статора 12 соединен с положительным входом блока сравнения 11, выход блока сравнения 11 подключен к входу блока коррекции сигнала управления 13, выход которого подключен к другому входу сумматора 8.
Электропривод переменного тока работает следующим образом.
Инвертор 1 через датчики 2, 3 фазных токов питает статорные обмотки асинхронного двигателя 4 широтно-модулируемыми пульсациями силового напряжения, длительность которых определяется управляющими пульсациями, поступающими с выхода блока 5, осуществляющего ШИМ-модуляцию и регулирование напряжения. Формирование синусоидальных фазных сигналов задания на блок ШИМ-регулирования напряжения 5 производится блоком формирования мгновенных значений гармонических сигналов задания напряжения 6, вырабатывающим сигналы задания на напряжение каждой из фаз 
 и
и 
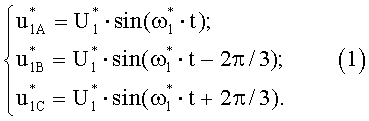
Блок задания сигналов управления 7 вырабатывает сигнал задания на частоту  , поступающий на частотный вход блока 6, и сигнал задания на амплитуду напряжения
, поступающий на частотный вход блока 6, и сигнал задания на амплитуду напряжения  , поступающий через сумматор 8 на амплитудный вход блока 6. При пуске двигателя и регулировании его частоты вращения блок задания сигналов управления 7 реализует изменение сигналов задания в соответствии с запрограммированным в этом блоке законом частотного управления
, поступающий через сумматор 8 на амплитудный вход блока 6. При пуске двигателя и регулировании его частоты вращения блок задания сигналов управления 7 реализует изменение сигналов задания в соответствии с запрограммированным в этом блоке законом частотного управления  .
.
При изменении условий работы электропривода, в частности изменения нагрузки на валу двигателя, и регулировании частоты вращения, для обеспечения минимального значения тока статора при заданном значении статического момента на валу двигателя необходимо изменять амплитуду напряжения  так, чтобы угол между векторами тока статора и тока намагничивания φ0 (фиг.2) был близок к 45°, при этом условии желаемый угол θ* между векторами тока статора и эдс статора равен 45°, тогда tgθ*=1. На фиг.3 приведены экспериментальные графики зависимостей тока статора от напряжения при разных фиксированных значениях статического момента на валу двигателя, полученные при частоте f=20 Гц
так, чтобы угол между векторами тока статора и тока намагничивания φ0 (фиг.2) был близок к 45°, при этом условии желаемый угол θ* между векторами тока статора и эдс статора равен 45°, тогда tgθ*=1. На фиг.3 приведены экспериментальные графики зависимостей тока статора от напряжения при разных фиксированных значениях статического момента на валу двигателя, полученные при частоте f=20 Гц  Из данных графиков видно, что существует минимальное значение тока статора, при котором достигается заданное значение момента двигателя.
Из данных графиков видно, что существует минимальное значение тока статора, при котором достигается заданное значение момента двигателя.
На основании векторной диаграммы (фиг.2) можно определить тангенс угла между векторами тока и эдс статора:

где U1 - модуль вектора напряжения статора; I1 - модуль вектора тока статора; φ - угол между векторами напряжения и тока статора.
Принимаем, что вектор напряжения статора  совпадает по направлению и по величине с задаваемым вектором напряжения
совпадает по направлению и по величине с задаваемым вектором напряжения  . Модуль и пространственное положение вектора напряжения
. Модуль и пространственное положение вектора напряжения  можно определить, используя вырабатываемые блоком 6 сигналы задания на мгновенные значения напряжений в каждой из фаз
можно определить, используя вырабатываемые блоком 6 сигналы задания на мгновенные значения напряжений в каждой из фаз 

 по выражениям перехода от трехфазной системы координат А, В, С к двухфазной прямоугольной системе координат α, β при совпадении положения осей А и α
по выражениям перехода от трехфазной системы координат А, В, С к двухфазной прямоугольной системе координат α, β при совпадении положения осей А и α
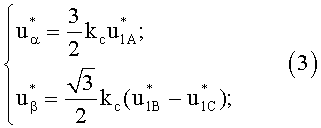


где kс - согласующий коэффициент пропорциональности, выбор которого осуществляется из условий инвариантности мощности реальной трехфазной машины и приведенной двухфазной машины ( ); kU - коэффициент датчика напряжения.
); kU - коэффициент датчика напряжения.
Модуль и пространственное положение вектора тока статора  можно определить, используя сигналы i1a, i1b,, i1c, измеряемые датчиками тока 2, 3 и определяемые на выходе сумматора 9, по выражениям перехода от трехфазной системы координат к двухфазной прямоугольной системе координат
можно определить, используя сигналы i1a, i1b,, i1c, измеряемые датчиками тока 2, 3 и определяемые на выходе сумматора 9, по выражениям перехода от трехфазной системы координат к двухфазной прямоугольной системе координат


где kI - коэффициент датчика тока.
При рассмотрении условия совпадения положения осей А и α вектор напряжения расположен на оси α, при этом условии получим
На узле сравнения 11 производится сравнение задаваемого блоком 12 значения tgθ*=1 и рассчитанного в блоке 10 по уравнениям (2)-(10) значения tgθ и определяется разность Δtgθ.
Величина сигнала коррекции напряжения ΔU определяется согласно алгоритму, приведенному на фиг.4. Работа алгоритма строится следующим образом. На вход блока 13 поступает задание на разность тангенсов углов между вектором тока статора и эдс статора Δtgθ. Если Δtgθ<0, то на очередном (n+1) шаге расчета происходит увеличение приращения ΔU к напряжению с шагом возрастания ξ=0,001 , пока угол θ не станет равным 45°, a tgθ=1, если Δtgθ>0, то происходит уменьшение приращения ΔU к напряжению
, пока угол θ не станет равным 45°, a tgθ=1, если Δtgθ>0, то происходит уменьшение приращения ΔU к напряжению  с шагом убывания ξ=0,001, если Δtgθ=0, то значение приращения ΔU к напряжению не изменяется. Считывание мгновенных значений tgθ происходит циклически с дискретностью, определяемой быстродействием системы.
с шагом убывания ξ=0,001, если Δtgθ=0, то значение приращения ΔU к напряжению не изменяется. Считывание мгновенных значений tgθ происходит циклически с дискретностью, определяемой быстродействием системы.
Преимущество предлагаемого электропривода переменного тока заключается в минимизации тока статора, обеспечивающего заданный момент двигателя, за счет более простого и точного определения требуемого сигнала коррекции задания напряжения питания двигателя, выполняемого на основании сравнения заданного и вычисленного тангенса угла между векторами тока статора и эдс статора двигателя, определяемого с помощью измеренных мгновенных значений фазных токов статора и задаваемых фазных напряжений статора.
Источники информации
1. Патент РФ №2396696, МПК H02 27/04. Электропривод переменного тока. В.Н.Мещеряков, В.А.Корчагина. Опубл. 10.08.2010. Бюл. №22.
2. Патент РФ №2447573, МПК H02 27/04. Электропривод переменного тока. В.Н.Мещеряков, Зотов В.А., Мещерякова О.В. Опубл. 10.04.2012. Бюл. №10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1979 |
|
SU849404A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
Изобретение относится к области электротехники и может быть использовано в регулируемых электроприводах переменного тока. Технический результат заключается в уменьшении тока статора, обеспечивающего заданный момент двигателя, повышении работоспособности устройства. Электропривод переменного тока содержит асинхронный двигатель, инвертор с ШИМ-регулятором, два датчика тока статора, блок задания частоты вращения поля статора и амплитуды напряжения, блок коррекции задания напряжения, содержащий блок вычислительных операций, осуществляющий выработку корректирующего сигнала задания напряжения в функции рассчитываемого параметра - тангенса угла между векторами тока и эдс статора, вычисляемого на основании измеренных значений фазных токов статора и сигналов задания на фазные напряжения двигателя. Электропривод работает с реально измеряемыми переменными, что упрощает алгоритм расчета корректирующего сигнала и снижает требования к управляющему контроллеру. 4 ил.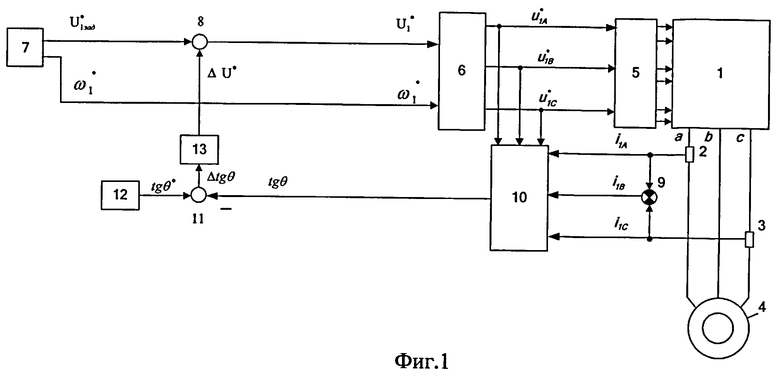
Электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум обмоткам статора асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой статора напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулирования, фазные входы которого соединены с фазными выходами блока формирования мгновенных значений гармонических сигналов задания, амплитудный вход которого соединен с выходом первого сумматора, выходы двух датчиков фазного тока статора соединены с входами другого сумматора фазных токов статора, а также соединены с двумя входами первой группы фазных входов блока вычисления параметра взаимной ориентации между векторами тока статора и другой переменной статора, выход сумматора фазных токов статора соединен с третьим входом первой группы фазных входов блока вычисления параметра взаимной ориентации векторов, выход блока расчета параметра взаимной ориентации векторов соединен с отрицательным входом блока сравнения параметра взаимной ориентации векторов, положительный вход которого соединен с блоком задания параметра взаимной ориентации векторов, а выход блока сравнения параметра взаимной ориентации векторов подключен к входу блока коррекции сигнала управления, отличающийся тем, что амплитудным значением гармонических сигналов задания является напряжение, вектором другой переменной статора является вектор эдс статора, а параметром взаимной ориентации между векторами тока и эдс статора является тангенс угла между этими векторами, выход блока коррекции сигнала управления соединен с одним входом первого сумматора, со вторым входом которого соединен амплитудный выход блока задания сигналов управления, частотный выход которого соединен с частотным входом блока формирования мгновенных значений гармонических сигналов задания, фазные выходы которого также соединены со вторыми фазными входами блока расчета параметра взаимной ориентации между векторами тока и эдс статора.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2396696C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| СПОСОБ ГИБКИ ТРУБ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2201308C2 |
| DE 69114120 T2, 04.04.1996 | |||
| JP 4108680 B2, 25.06.2008 | |||
| US 6166514 A1, 26.12.2000 | |||
| EP 0790701 B1, 16.05.2001 | |||
| WO 9204763 A1, 19.03.1992 | |||

