Изобретение относится к электротехнике и может быть использовано в многодвигательных электроприводах высокопроизводительных ленточных конвейеров, мощных роторных экскаваторов и т.д.
Цель изобретения - обеспечение равенства мощностей, развиваемых всеми асинхронно-вентильными каскадами (АВК) многодвигательного электропривода независимо от загрузки механической части привода и от различия скоростей вращения двигателей асинхронно-вентильных каскадов.
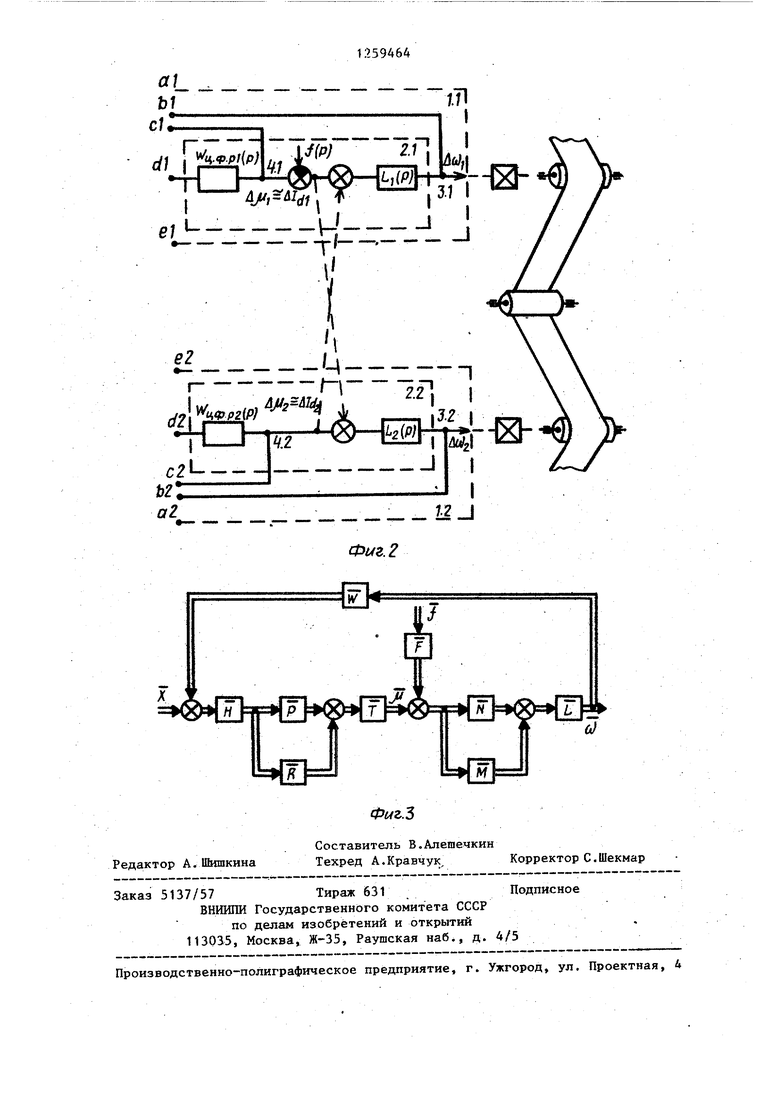
На фиг.1 и 2 представлена функциональная структурная схема двумерной системы автоматического управления двухбарабанного многодвигательного электропривода ленточного конвейера; на фиг. - то же, в матричной форме.
Многодвигательный электропривод содержит - АВК 1.1 и 1.2, составленные из двигателей 2.1 и 2.2 с датчи 1сами 3.1 и 3.2 скорости и датчиками 4.1 и 4.2 тока, из регуляторов 5.1 и 5,2 скорости, первых элементов 6. и 6.2 сравнения, вторых элементов
7.1и 7.2 сравнения, регуляторов 8. и 8.2 тока, преобразователей 9.1 и
9.2в роторной цепи двигателей 1.1 и 1.2. Одни входы первых элементов 6.1 и 6.2 сравнения подключены к источнику задающего напряжения по скорости, другие входы - к выходам датчиков 3.1 и 3.2 скорости двигателей 1.1 и 1.2. Выходы первых э51еменН
Т
Н, (р), 0|| О, H,(p)l
Т(р), 0. О, )
Р, (р), , R,,{p)
О, P,(p)il .(Р). О
F 1„111, Oil . j5- ЦО. 111 .
О, О II Но, ill - Ik oil
L (р), 0| О, L,(p)
W
W((p) Oji
о, w(p)|
где Т, (р)
и Т (р) - передаточные функции контуров тока АВК 1.1 и 1.2, объединяющих звенья с передаточными функциями Т,(р); W, (р); W,,, (р) и Т, (р);
цтРд(Р соответственно.
тов 6.1 и 6.2 сравнения через регуляторы 5.1 и 5.2 скорости подключены к одним входам вторых элементов 7.1 и 7.2 сравнения, другие входы которых подключены к выходам регуляторов скорости остальных систем управления. Третьи входы вторых элементов 7.1 и 7.2 сравнения подключены к выходам датчиков 4.1 и 4.2 тока роторной цепи двигателей 1.1 и 1.2, выходы вторых элементов 7.1 и 7.2 сравнения через регуляторы 8.1 и 8.2 тока подключены к входам соответствующих преобразователей 9.1 и 9.2 в роторных цепях двигателей 1.1 и 1.2.
Принцип вьфавнивания мощностей Р, и Р, развиваемых двигателями 2.1 и 2.2 АВК 1.1 и 1.2, рассмотрим на примере. Для этого докажем справед-. ливость равенства
, PI
где Р, &uJj-u|, ;
р ,;
(1)
4 JL)| Д
&f- - соответственно скорости вращения и моменты . двигателей 2.1 и 2.2
АВК 1.1 и 1.2.
Определим величины , .аИ , Др ..
Выражения для матричных переда- точньк функций звеньев функциональной схемы двумерной системы автоматического управления двухбарабанного многодвига- тельного электропривода ленточного конвейера (фиг.2 и 3), можно представить следующим образомг
f
f(p
0
x
Матричная структурная схема (фиг.З описывается уравнениями: с L(N+M)(P-i-Ff),- (2)
(f+ft)H(x+wJJ). (3)
Разрешая эти уравнения относитель- но векторов uJ и (G , получим их матрицы в виде
; W
f5)
Тогда, подставляя в выражение (1) значения 4uJi , ,, и d/u 2 з уравнений (4) и (5), приходим к тождеству duJ дд 41 -1г4/ 2 подтверждающему, что при предлагаемом способе управления мощности, развиваемые двигателями 2.1 и 2.2 АВК 1.1 и 1.2, тождественно равны при любых изменениях задаю- щего Х(р) и возмущающего f(p)(загрузки конвейера) воздействий, а также во всем реальном диапазоне скоростей вращения обоих барабанов относительно друг друга.
Таким образом, использование предлагаемого способа управления многодвигательным электроприводом расширяет функциональные возможности таких приводов, так как электропривод обеспечивает выравнивание мощностей, развиваемых двигателями в режиме любой загрузки механической части, независимо от величйЖ отклонения скоростей вращения двигателей разных сепарат- ных систем управления.
Формула изобретения
Способ управления многодвигатель- ныЙ1 электроприводом, выполненным на базе асинхронно-вентильных каскадов с системой управления каждый, при котором измеряют скорость двигателя одного асинхронно-вентильного каска
да и фазные токи роторных цепей дни
jю15
2о 25
, 5
гателей всех асинхронно-вентильных каскадов, формируют напряжения, пропорциональные указанным измеряемым параметрам, сравнивают с задающим напряжением и формируют управляющее напряжение, подаваемое на вход регулятора тока системы управления каждого асинхронно-вентильного каскада, отличающийся тем, что, с целью обеспечения равенства мощностей, развиваемых всеми асинхронно- вентильными каскадами от загрузки механической части привода и от различия скоростей вращения двигателей асинхронно-вентильных каскадов, дополнительно измеряют скорости вращения двигателей остальных асинхрон- но-вейтильных каскадов, формируют напряжение, пропорциональное скорости двигателя каяадого асинхронно-вентильного каскада, сравнивают с задающим напряжением и напряжение рассогласования подают на вход регулятора скорости системы управления соответствующего асинхронно-вентильного каскада, затем суммируют выходные напряжения всех регуляторов сжорос- ти, вычитают из полученного суммарного напряжения напряжение, пропорциональное фазному току роторной цепи двигателя каждого асинхронно-вентильного каскада, и напряжение, пропорциональное разности указанных напряжений,, подают на вход регулятора то- ка системы управления соответствующего асинхронно-вентильного каскада.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления многодвигательным электроприводом | 1983 |
|
SU1200375A1 |
| Способ регулирования скорости электрического рабочего вала | 1971 |
|
SU545057A1 |
| Устройство для управления подъемно-транспортной установкой | 1983 |
|
SU1159847A1 |
| Многодвигательный электропривод | 1985 |
|
SU1300623A1 |
| Устройство для управления многоприводной подъемно-транспортной установкой | 1978 |
|
SU781144A1 |
| Машинно-вентильный каскад | 1973 |
|
SU508874A2 |
| Магнитно-фрикционный электропривод ленточного конвейера | 1982 |
|
SU1093634A1 |
| СПОСОБ ПРЕДУПРЕДИТЕЛЬНОГО УПРАВЛЕНИЯ АВТОНОМНОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2785561C1 |
| УСТРОЙСТВО ДЛЯ ПРЕВЕНТИВНОЙ ЗАЩИТЫ СУДОВОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ ОТ ПЕРЕГРУЗКИ | 2024 |
|
RU2833549C1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1343534A1 |
Изобретение относится к электротехнике и может быть использовано в многодвигательных эл. приводах высокопроизводительных ленточных конвейеров и мощных роторных экскаваторов. Целью изобретения является обеспечение равенства мощностей, развиваемых всеми асинхронно-вентильными каскадами, независимо от загрузки механич. части привода и от различия скоростей вращения двигателей. Суть изобретения заключается в том, что сигнал управления каждым асинхронно- вентильным каскадом двигателя формируется не только в функции тока роторной цепи, но и в функции скорости каждого двигателя. Сигнал управления формируется на выходе регулятора сксфости, к-рьА затем подается на вход регулятора тока. 3 ил. (Л
4р;
62 ,а2
и
I
N
-HJ Фиг. 2
0)
Редактор A,Шишкина
Фиг.З
Составитель В.Алешечкин
Техред А.Кравчук Корректор С.Шекмар
Заказ 5137/57Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ автоматического распределения нагрузок в многодвигательном электроприводе технологического пресса | 1980 |
|
SU972645A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Назаренко В.М | |||
| Многодвигательный электропривод ленточного конвейера | |||
| - Горный журнал, 1974, 4, с.158-163. | |||
