Изобретение относится к машиностроению и может быть использовано в промышленных роботах.
Цель изобретения - упрощение системы управления и повышение быстродействия.
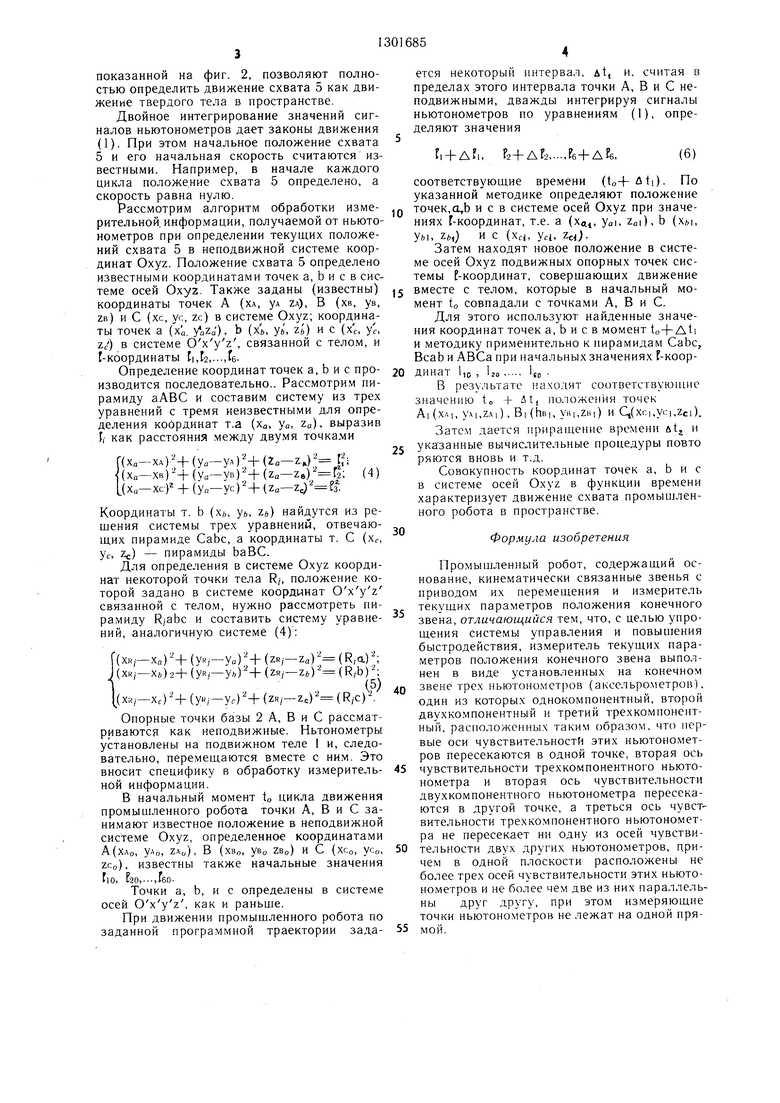
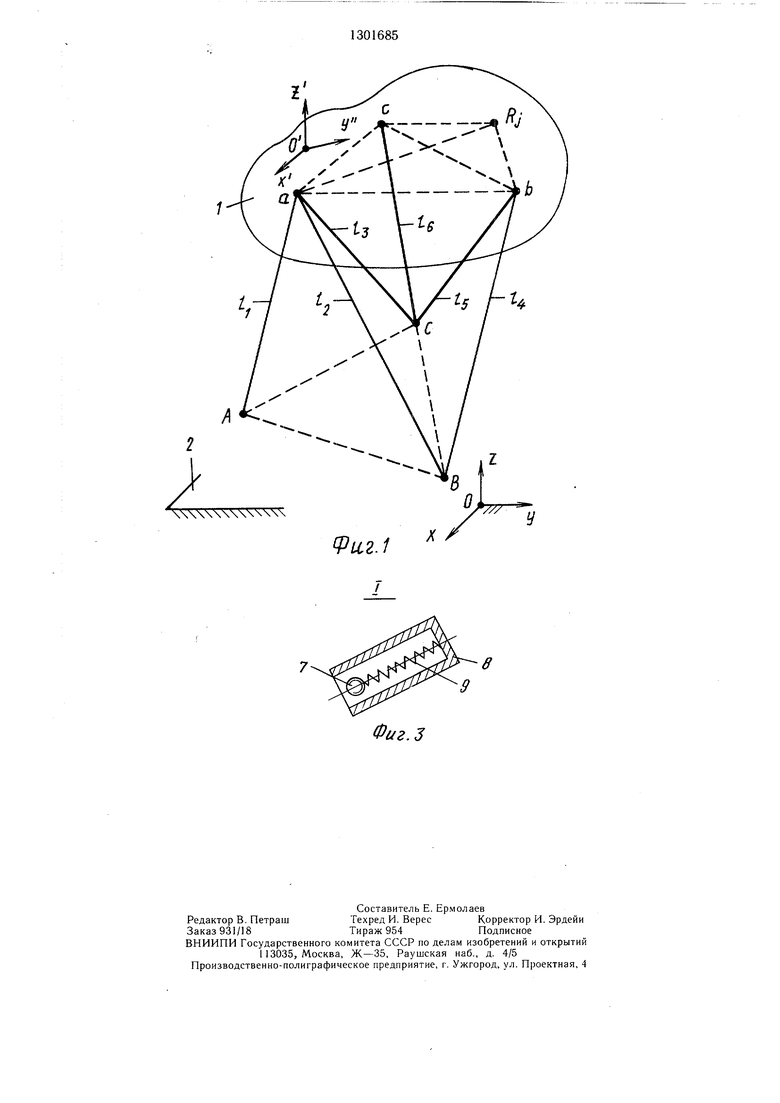
На фиг. 1 изображена система Е-коор- динат; на фиг. 2 - схема промышленного робота; на фиг. 3 - узел I на фиг. 2 (укрепленная схема ньютонометра).
В промышленном роботе используется измеритель, в котором текуш,ие параметры положения конечного звена в пространстве определяются в f-координатах. Положение твердого тела 1 в пространстве относительно какой-либо системы координат определяется шестью числами. В 1-координатах
в качестве таких чисел используются длины сматриваются связанными с инерционными
fi, 2,...,б шести отрезков, соединяющих тело 1 с неподвижной базой 2 таким образом, что при заданных значениях EI, Е2,..-Дб образуется геометрически неизменяемая структура. Здесь отрезки fi, Г2,...,5б соединяют три, не лежащие на одной прямой, опорные точки А, В, С тела 1. Таким образом, базы 2 стремя, не лежащими на одной прямой, опорными т.очками а, b и с тела 1. Таким образом, система -координат включает две различные группы опорных точек. Опорные точки
элементами ньютонометров и расположены в выбранных местах на их осях чувствительности. Опорные точки системы 1-координат, принадлежащие телу 1, совпадают с точками измерения на теле 1, а оси чувствитель- 2Q ности ньютонометров проходят вдоль прямых Аа, Ва, Са, ВЬ, СЬ и Сс.
Промыщленный робот работает следующим образом.
Приводы 4 по команда.м управляющей
, „-„программы (не показано) перемещают звеоднои группы принадлежат базе 2, а другой- 25 3. При этом схват 5 движется в простран- телу 1.г г
Совокупность текущих значений fi, Ег,..-, Гб характеризует положение тела 1 относительно базы 2, так как пирамиды аАВС, СаЬс и ЬаВС образуют геометрически неизменяемые фигуры. При этом каждая из шести f-координат может изменяться независимо от других, что соответствует определенным -положениям тела 1.
30
стве, а его текущие положения определяются измерителем 6.
В т. 1 установлен трехкомпонентный ньютонометр, в т. 2 - двухкомпонентный, а в т. 3 - однокомпонентный (стрелками показаны направления осей чувствительности ньютонометров). Первые оси чувствительности этих ньютонометров пересекаются в одной точке (т. 3), вторая ось чувствительности трехкомпонентного ньютонометра и вторая ось чувствительности двухкомпонент- 35 ного ньютонометра пересекаются в другой точке (т. 2), а третья ось чувствительности трехкомпонентного ньютонометра не пересекает ни одну из осей чувствительности двух других ньютонометров (т. 1).
В -координатах уравнения движения свободного твердого тела имеют вид: (t); (t); (t);
(1) (t); f5 f.5(t); (t).
Дифференцируя уравнения (1) по t, получаем:
r, fi(t); f2 (t);
f2(t) (t);
(2)
I5 f5(t-), Гб f6(t) ,
где fij.,...,fc - проекции скорости точек a, b, и с теЛа 1 (фиг. 1) на прямые Аа, Ва, Са, ВЬ, СЬ, и Сс соответственно. Дифференцируя по t уравнения (2). получаем: Г, f,(t)-, r2,f2(t), (1)-,
.. ..(3)
f., f4(t); (t), (1),
где fi, Г2,...,Сб - проекции ускорений точек а, Ь, и с на прямые Аа, Ва, Са, ВЬ, СЬ и Сс соответственно.
Таким образом, так как уравнения (1) полностью определяют движение тела 1 в пространстве, они позволяют найти текущее значение скорости и ускорения любой его точки. Интегрируя уравнения (3) и (2), можно прийти к уравнениям (1) при известных начальных условиях.
Определение значений ускорений точек измерения тела 1 (т. а, b и с)в направлениях, обусловленных текушим р асположени- нием прямых, вдоль которых определяются -координаты, полностью определяет движение тела 1.
Промышленный робот содержит звенья 3, которые снабжены приводами 4, на конечном звене (схвате) 5 установлен измеритель 6 его текуш.его положения в пространстве, выполненный в виде трех ньютоно.метров, каждый из которых состоит из инерционного элемента 7, связанного с корпусом 8 пружиной 9 известной жесткости.
Система t-координат располагается так, что точки базы 2 (точки А, В и С фиг. 1) рассматриваются связанными с инерционными
элементами ньютонометров и расположены в выбранных местах на их осях чувствительности. Опорные точки системы 1-координат, принадлежащие телу 1, совпадают с точками измерения на теле 1, а оси чувствитель- ности ньютонометров проходят вдоль прямых Аа, Ва, Са, ВЬ, СЬ и Сс.
5 3. При этом схват 5 движется в простран- г г
0
0
стве, а его текущие положения определяются измерителем 6.
В т. 1 установлен трехкомпонентный ньютонометр, в т. 2 - двухкомпонентный, а в т. 3 - однокомпонентный (стрелками показаны направления осей чувствительности ньютонометров). Первые оси чувствительности этих ньютонометров пересекаются в одной точке (т. 3), вторая ось чувствительности трехкомпонентного ньютонометра и вторая ось чувствительности двухкомпонент- 5 ного ньютонометра пересекаются в другой точке (т. 2), а третья ось чувствительности трехкомпонентного ньютонометра не пересекает ни одну из осей чувствительности двух других ньютонометров (т. 1).
Оси чувствительности всех трех ньютонометров находятся не более трех в одной плоскости и не более чем две из них параллельны друг другу. Эти требования обусловлены мгновенной геометрической неизменяемостью структуры Е; координат, которая необходима для определения (описания) положения твердого тела в пространстве с помощью Е-координат (для образования пирамид аАВС, СаЬс и ЬаВС).
Ньютонометр работает следующим образом. При движении конечного звена 5 с ускорением инерционный элемент 7, связанный с корпусом 8 пружиной 9 известной жесткости, смещается вдоль оси чувствительности из нейтрального положения, при котором пружина 9 не сжата и не растянута. Величина смещения инерционного элемента 7 определяет ускорение, с которым движется точка схвата 5 (точка измерения), связанная с ньютонометром, в направлении оси его чувствительности. Совокупные показания ньютонометров, расположенных по схеме,
5
0
55
показанной на фиг. 2, позволяют полностью определить движение схвата 5 как движение твердого тела в пространстве.
Двойное интегрирование значений сигналов ньютонометров дает законы движения (1). При этом начальное положение схвата 5 и его начальная скорость считаются известными. Например, в начале каждого цикла положение схвата 5 определено, а скорость равна нулю.
Рассмотрим алгоритм обработки измерительной, информации, получаемой от ньютонометров при определении текущих положений схвата 5 в неподвижной системе координат Oxyz. Положение схвата 5 определено известными координатами точек а, b и с в системе осей Oxyz. Также заданы (известны) координаты точек А (х., у.д ZA), В (хв, ув, ZB) и С (хс, УС, zc) в системе Oxyz; координаты точек а (х а, /aZa), Ь (Х(,, Уб, Zft) и с (с, у с,
Zc ) в системе O x y z , связанной с телом, и 1-координаты I,lz,...,l6Определение координат точек а, b и с производится последовательно.. Рассмотрим пирамиду аАВС и составим систему из трех уравнений с тремя неизвестными для определения координат т.а (ха, уа, ZQ), выразив I,- как расстояния между двумя точками
Г(х.Хл)Ч(Уа-уА)Ч(га-г.,)- Hi {(Ха-Хв)Ч(Уа-Ув)Ч(2а-Ze) (4) (Xa-Xcf + (у„-ус:)Ч (Z..
Координаты т. b (h, Уь, Zf,) найдутся из решения системы трех уравнении, отвечающих пирамиде СаЬс, а координаты т. С (Хг, УС, Zc) - пирамиды ЬаВС.
Для определения в системе Oxyz координат некоторой точки тела R/, положение которой задано в системе координат O x y z связанной с телом, нужно рассмотреть пирамиду Rjabc и составить систему уравнений, аналогичную системе (4);
(XR/-.Ха) +(ув, -ya)-f (ZR/-Za)(R,a)-;
KXR/-Хб)2+(ух,-y .) +(zR,-zt)-(R,b)-;
(5) (xRj-Хс) + (УК/-УС) + (ZR/--z.c) (R/c) .
Опорные точки базы 2 А, В и С рассматриваются как неподвижные. Ньтонометры установлены на подвижном теле 1 и, следовательно, перемещаются вместе с ним. Это вносит специфику в обработку измерительной информации.
В начальный момент to цикла движения промыщленного робота точки А, В и С занимают известное положение в неподвижной системе Oxyz, определенное координатами
А(ХАо, УА„, Z.o) , В (хв„, уво ZBo) И С (хс,,, уСо,
zco), известны также начальные значения
Гю, 20,...,ГбО.
Точки а, Ь, и с определены в системе осей O x y z , как и раньще.
При движении промыщленного робота по заданной программной траектории задается некоторый интервал, д, и. считая в пределах этого интервала точки А, В и С неподвижными, дважды интегрируя сигналы ньютонометров по уравнениям (1), определяют значения
Г| + , 2+ЛГ2,...,Рб+АРб,
(6)
соответствующие времени (). По указанной методике определяют положение точек,a,b и с в системе осей Oxyz при значениях Г-КООрДИНаТ, т.е. а (х, Уа|, Zai), b (Х/,;,
УМ, Z(,,) и с (хсь усь Zc.
Затем находят новое положение в системе осей Oxyz подвижных опорных точек системы f-координат, соверщающих движение вместе с телом, которые в начальный момент to совпадали с точками А, В и С.
Для этого используют найденные значения координат точек а, b и с в момент to+Ati и методику применительно к пирамидам СаЬс, ВсаЬ и АВСа при начальных значениях f-координат 1,0 , Ijo IEO
В результате находят соответствующие значению t + it, положения точек
AI (ХЛ|, yAi,ZA|) , Bi (Нв|, yiM,ZB|) и Q(XC|,yc|,Zci).
Затем дается приращение времени utj и указанные вычислительные процедуры повто ряются вновь и т.д.
Совокупность координат точек а, b и с в системе осей Oxyz в функции времени характеризует движение схвата промыщленного робота в пространстве.
30
Формула изобретения
Промыщленный робот, содержащий основание, кинематически связанные звенья с приводом их перемещения и измеритель текущих параметров положения конечного звена, отличающийся те.м, что, с целью упрощения системы управления и повышения быстродействия, измеритель текущих параметров положения конечного звена выполнен в виде установленных на конечном
Q звене трех ньютонометров (аксельрометров), один из которых однокомпонентный, второй двухкомпонентный и третий трехкомпонент- ный, расположенных таким образом, что первые оси чувствительности этих ньютонометров пересекаются в одной точке, вторая ось
5 чувствительности трехкомпонентного ньюто- нометра и вторая ось чувствительности двухкомпонентного ньютонометра пересекаются в другой точке, а треться ось чувст- вительности трехкомпонентного ньютонометра не пересекает ни одну из осей чуветви0 тельности двух других ньютонометров, причем в одной плоскости расположены не более трех осей чувствительности этих ньютонометров и не более чем две из них параллельны друг другу, при этом измеряющие точки ньютонометров не лежат на одной пря5 мой.
Фи,г.1
| название | год | авторы | номер документа |
|---|---|---|---|
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| Система управления промышленным роботом | 1981 |
|
SU1127767A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2644580C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАКЛОНА БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ КОМПЛЕКСНОЙ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ОТНОСИТЕЛЬНО ПЛОСКОСТИ ГОРИЗОНТА | 2016 |
|
RU2646941C1 |
| Манипулятор модульного типа | 1982 |
|
SU1174256A1 |
| Способ измерения пространственной вибрации точки тела и устройство для его осуществления | 1991 |
|
SU1826068A1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2696086C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах. Целью изобретения является упрош,ение системы управления и повышение быстродействия. Для этого измеритель текущих параметров положения конечного звена 5 в пространстве выполнен в виде установленных на конечном звене в трех точках трех ньютонометров 6, первый из которых однокомпонентный, второй двух- компонентный, и третий трехкомпонентный. 3 ил. (Л со т. оо ел
Фиг.З
| Колискор А | |||
| Ш | |||
| Разработка и исследование промышлен-ных роботов на основе -координат.-Станки и инструмент, 1982, № 12, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
