Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано при автоматизации различных работ в труднодоступных местах, характеризующихся узкими, искривленными пространствами, например сварка в салоне автомобиля, загрузка станков, сборка, окраска и т.д. .. .
Цель изобретения- упрощение системы управления манипулятора и повышение быстродействия.
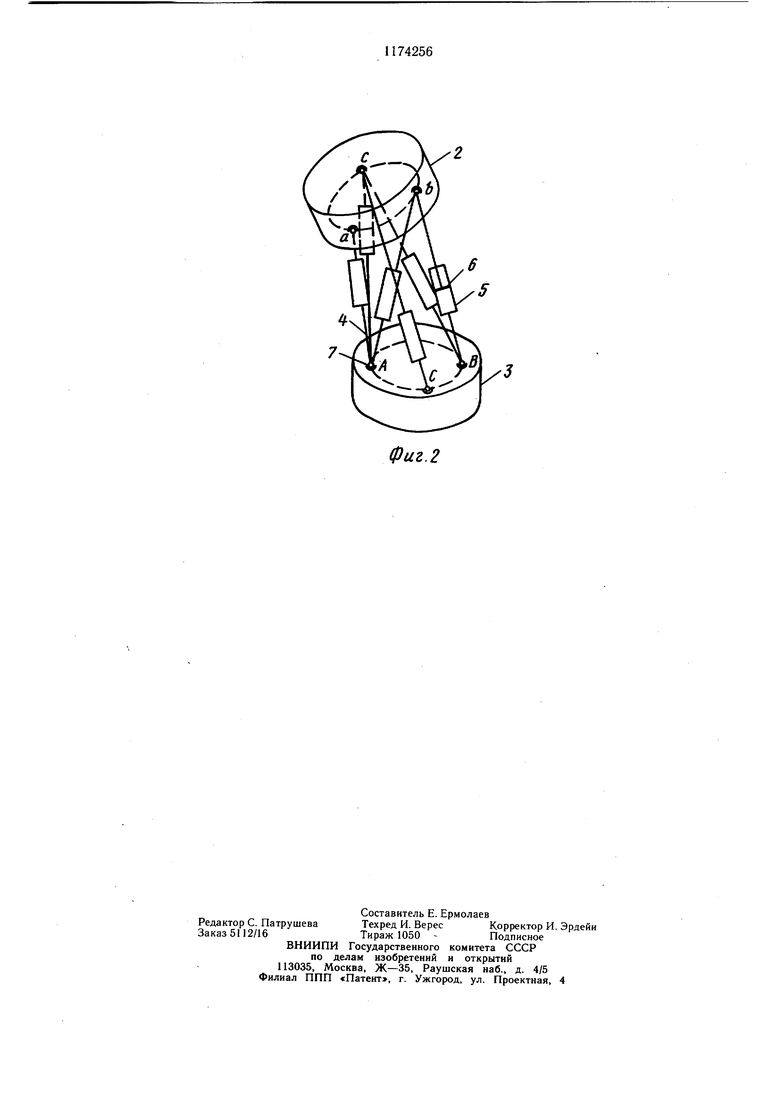
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - кинематическая схема модуля. : ,.
Манипулятор (фиг. 1) состоит из соединенных между собой модулей 1 (фиг. 2), каждый из которых обладает шестью степенями подвижности. Фланцы 2 и 3 каждого модуля соединены между собой шестью тягами 4, длины которых изменяются с помощью приводов, например силовых цилиндров 5. Порщии 6 цилиндров 5 связаны с фланцем 2 модуля 1 при помощи шарниров 7, а сами цилиндры 5 таким же образом - с фланцем 3. Если длпнЕ 1 тяг 4 зафиксировать, то число степеней подвижности модуля станет равным О, т.е. система превратится в ферму. Геометрическая интерпретация конструкции состоит в том,.что щарниры 7 расположены на фланцах 2 и 3 модулей 1 таким образом, что образуют три не лежащие на одной прямой точки, а оси тяг и стороны треугольников, образованных этими точками, представляют собой пирамиды сАВС, АаЬс и АВЬс. Так как пирамиды являются геометрическими неизменяе.мыми фигурами, то совокупность длин тяг 4 и их расположение однозначно характеризуют взаимное расположение фланцев 2 и 3, причем ни одна из тяг 4 не может быть изъята без нарушения взаимной привязки фланцев 2 и 3.
Механизм работает следующим образом.
При помощи силовых цилиндров 5 по программе, поступающей от системы управления (не показаны), изменяется длина тяг 4. При этом изменение длины каждой тяги 4 может производиться по своему закону, т.е. система управления задает законы изменения длин тяг 4
Е, E,(t); (t); ,. Ej(t); ,(t); (t); Is- K6(t), гдеЕ.-.Еб-текущие длины тяг 4; t - время.
Таким образом, один модуль 1 имеет 6 степеней подвижности, а пространственный механизм, содержащий п модулей, имеет 6п степеней подвижности. Например, механизм, показанный на фиг. 1, состоит из четырех модулей и имеет 24 степени подвижности.
Система управления пространственным механизмом существенно упрощается, если тяги 4 соединяют три расположенные не на одной прямой точки одного фланца 2 с тремя расположенными также не на одной прямой точками другого звена 3, а оси тяг 4 и стороны треугольников, образованных указанными точками, представляют собой пирамиды.
Это объясняется тем, что уравнения расчета текущих координат вершин пирамид существенно проще расчетов остальных вариантов конструкции, так как используют ту особенность, что в определенных точках пересекаются по три ребра пирамиды, соотг ветствующих текущим значениям Ej. Это приводит к тому, что для определения декартовых координат точек а, Ь, с достаточно решить три системы из трех уравнений.
Благодаря этому уменьшается объем памяти системы управления, обрабатывающей
0 информацию в реальном масштабе времени, снижаются требования к ее быстродействию, т.е. система управления упрощается.
Еще один путь упрощения системы управления заключается в выполнении тяг 4
5 с фиксацией в двух крайних положениях. В этом случае система управления формирует сигналы, задающие только одну из двух длин тяги 4 - максимальную или минимальную. Применительно к модулю, показанному на фиг. 2, это означает, что порщень 6
0 по командам системы управления может занимать либо крайнее верхнее положение, либо - крайнее нижнее положение. При этом фиксация тяги 4 в каждом из этих двух положений осуществляется подачей масла в определенную полость цилиндра 5.
Промежуточные положения поршня 6 цилиндра 5 не программируются, а программа задает для цилиндра 5 каждой тяги 4 полость, в которую подается давление.
Для удержания механизма в заданном
0 положении при отключении давления масла с целью фиксации тяг 4 в двух крайних положениях могут быть использованы механические фиксаторы (не показаны), например типа пружина-шарик.
Б рассмотренном случае длина каждой
5 тяги 4 может иметь два значения, а фланец 2 относительно фланца 3 (фиг. 2) может иметь 2 положений в пространстве. При соединении двух модулей 1 выходное звено последнего модуля со схватом имеет 2 поg ложений, а при соединении п модулей - 2 положений в пространстве. Таким образом, увеличение числа модулей 1, образующих пространственный механизм, увеличивает число возможных положений выходного звена манипулятора со схватом в пространстве.
фиг.2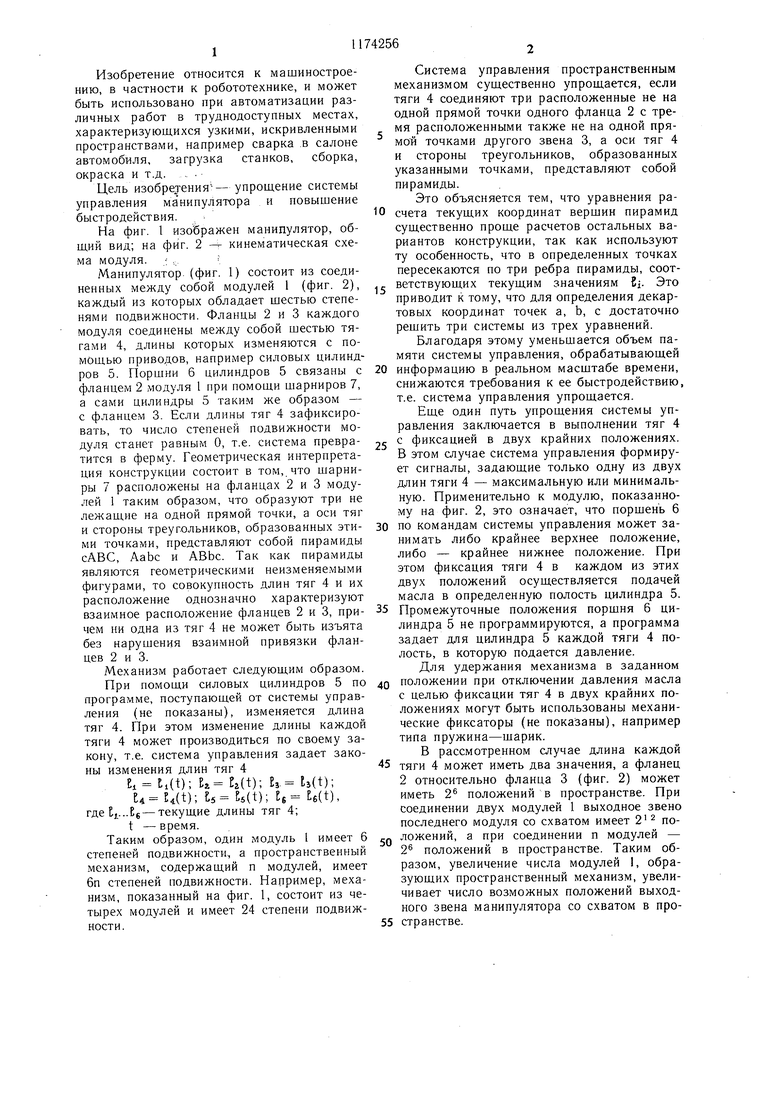
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Устройство для подачи деталей | 1981 |
|
SU1018763A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА, содержащий модуль, образованный шестью тягами с приводами, изменяющими длины этих тяг а также двумя фланцами, в трех точках каждого из которых расположены центры сферических шарниров, связывающих концы тяг фланцами, отличающийся тем, что, с целью упрощения системы управления и повыщения быстродействия, в первой точке каждого фланца модуля расположен центр одного щарнира, во второй точке расположены центры двух шарниров, а в третьей - трех щарниров, при этом точка одного фланца, являющаяся центром трех щарниров, связана тягами с тремя точками другого фланца, а точка одного фланца, являющаяся центром двух щарниров, связана тягами с двумя точками другого фланца. сл е Ч 4 1Ю сд О5 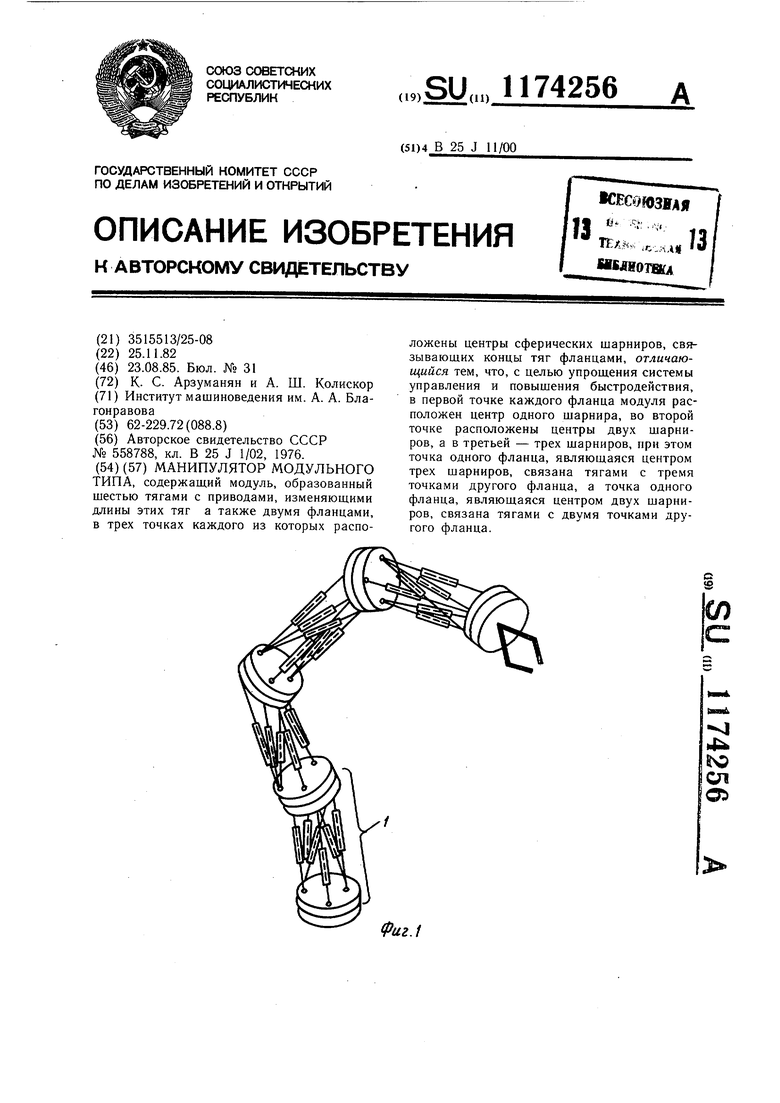
| Манипулятор | 1976 |
|
SU558788A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
