Изобретение относится к радиотехнике, а именно к способам определения местоположения источника радиоизлучения (ИРИ), и может быть использовано в навигационных, пеленгационных, локационных средствах для определения местоположения ИРИ на произвольной высоте, в частности, расположенного на летательном аппарате (ЛА).
Известен разностно-энергетический способ определения координат местоположения ИРИ [1]. Для реализации данного способа последовательно выполняют следующие этапы:
размещают три стационарных измерителя амплитуд напряженностей электрического поля (АНЭП) в точках с известными координатами, не на одной прямой, один из которых принимают за базовый, а два оставшихся за периферийные;
измеряют и усредняют значения уровней АНЭП, создаваемых ИРИ в каждом измерителе;
передают на базовый измеритель значения АНЭП двух периферийных измерителей;
вычисляют три значения отношений попарных АНЭП полученных в базовом и двух периферийных измерителях;
составляют три уравнения окружностей с центрами, соответствующими координатам измерителей, и радиусами обратно-пропорциональными отношениям попарных АНЭП;
на основе полученных квадратов отношений попарных АНЭП и вычисленных квадратов расстояний между измерителями, составляют определитель Кели-Мегнера, по которому определяют действительные расстояния от постов до ИРИ;
по любым двум, из трех возможных, парам уравнений окружностей положения ИРИ определяют текущие значения широты и долготы местоположения ИРИ.
Недостатками аналога [1] являются:
длительное время определения координат ИРИ, связанное с необходимостью циркуляции информации между стационарными измерителями;
возникновение ошибки в определении координат ИРИ, обусловленной отсутствием учета высоты ИРИ и отсутствием учета высот измерителей;
неоднозначность определения координат ИРИ, возникающей пересечением двух окружностей положения ИРИ, которые в свою очередь пересекаются, в общем случае, в двух точках.
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов [2]. Указанный способ заключается в том, что на основе измерений временных задержек и частотных сдвигов между переданными и принятыми тестовыми сигналами системы, с учетом известных координат первого и второго спутников-ретрансляторов СР1, СР2, векторов их скоростей  ,
,  , координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования
, координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования  ,
,  рабочих частот СР1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
рабочих частот СР1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
Для реализации указанного известного способа выполняют следующие этапы:
определяют расстояние  между первым CP1 и ПТ;
между первым CP1 и ПТ;
определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
измеряют модуль  , азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
, азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
вычисляют в УМС доплеровские сдвиги частот  и
и  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и CP2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, CP2 и определенных параметров
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и CP2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, CP2 и определенных параметров  и
и  ;
;
определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого CP1 относительно ПТ, и/или радиальную скорость
перемещения первого CP1 относительно ПТ, и/или радиальную скорость  перемещения второго CP2 относительно ПТ, с учетом доплеровских сдвигов частот
перемещения второго CP2 относительно ПТ, с учетом доплеровских сдвигов частот  и
и  ;
;
вычисляют широту ϕПТ и долготу λПТ ПТ.
Недостатками способа определения местоположения ПТ с использованием двух спутников-ретрансляторов [2] являются:
длительное время определения координат ЗС, связанное с необходимостью проведения дополнительных измерений модуля, азимута вектора скорости ПТ и его высоты относительно земной поверхности,
необходимость ответной передачи тестовых сигналов с ПТ, чьи координаты необходимо определить в УМС через СР.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ определения координат ИРИ с использованием летательного аппарата [3], заключающийся в том, что:
выбирают 3-мерную декартову систему координат (ДСК) для производства измерений и расчетов;
размещают измеритель на ЛА;
перемещают указанный ЛА в пространстве;
принимают радиосигнал ИРИ в заданной полосе частот ΔF;
измеряют и запоминают первичные координатно-информативные параметры принятого радиосигнала, в качестве которых используют АНЭП, создаваемую ИРИ в точке приема;
измеряют и запоминают вторичные параметры (ВП) - координаты местоположения ЛА;
многократно измеряют и запоминают совокупности АНЭП En (где n=1…N) и ВП - координаты ЛА в 3-х мерной ДСК xn, yn и zn в процессе перемещения ЛА;
вычисляют N - 1 коэффициентов окружностей Апполония, как отношений АНЭП, перемноженных на обратные отношения высот ЛА в соответствующих точках измерения;
формируют N - 1 сферических поверхностей положения (СПП) ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих соответствующие фокусы;
в качестве координат ИРИ в пространстве принимают координаты точки пересечения N - 1 указанных СПП ИРИ.
Недостатками способа прототипа являются:
относительно невысокая точность определения координат ИРИ, обусловленная ошибками предварительного определения координат БЛА при каждом измерении АНЭП [4];
длительное время определения координат ИРИ, связанное с необходимостью полета ЛА по траектории, длина которой, соизмерима с расстоянием от БЛА до ИРИ [5];
невозможность определения координат ИРИ, размещенных на подвижных объектах, в частности на ЛА.
Целью изобретения является разработка способа, обеспечивающего более высокую точность определения координат ИРИ в 3-мерном пространстве в условиях наложения ограничения на время, затрачиваемое на определение координат ИРИ на основе формирования СПП ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих их фокусы. При этом фокусы окружностей Апполония соответствуют точкам расположения измерителей с известными координатами в 3-х мерном пространстве.
Поставленная цель достигается тем, что в известном способе определения координат ИРИ, включающем выбор 3-мерной ДСК для производства измерений и расчетов, прием радиосигнала ИРИ в заданной полосе частот ΔF, измерение и запоминание N≥5 АНЭП En, где n=1…N, создаваемых ИРИ в точках приема, выделение в качестве опорной g-ю, где g=1, 2, ..., N, АНЭП, формирование N - 1 отличающихся друг от друга пар АНЭП, при этом одним из элементов в каждой из пар выбирают g-ю опорную АНЭП, вычисление для каждой сформированной пары АНЭП коэффициента окружности Апполония используя отношения соответствующих АНЭП, формирование N - 1 СПП ИРИ на основе коэффициентов окружностей Апполония, вычисление координат ИРИ используя указанные СПП предварительно выбирают район ведения радиомониторинга. Устанавливают на земной поверхности N≥5 измерителей АНЭП на позициях с известными координатами xKn, yKn, zKn, где n=1…N - номер измерителя АНЭП. Для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония как отношение АНЭП, перемноженное на обратное отношение высот измерителей АНЭП относительно поверхности земли.
В качестве фокусов окружности Апполония принимают координаты точек, соответствующих координатам измерителей АНЭП. На основе коэффициентов окружностей Апполония и известных координат измерителей АНЭП формируют N - 1 СПП ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих соответствующие фокусы. В качестве координат ИРИ в пространстве принимают координаты точки пересечения N - 1 указанных СПП ИРИ.
Благодаря перечисленной новой совокупности существенных признаков, за счет формирования СПП ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих фокусы, соответствующие известным координатам измерителей АНЭП, достигается цель изобретения: повышение точности определения координат ИРИ в 3-мерном пространстве в условиях наложения ограничения на время, затрачиваемое на определение координат ИРИ.
Заявленный способ поясняется чертежами, на которых показаны:
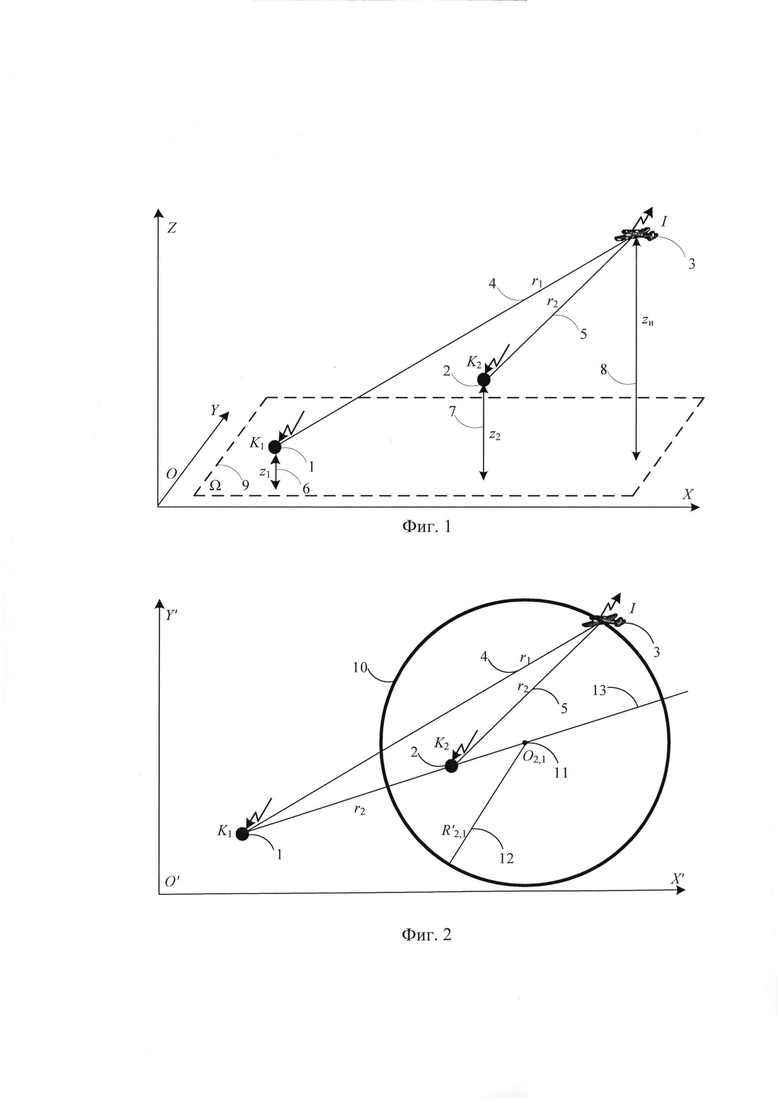
на фиг. 1 - геометрическая основа системы измерения координатно-информативных параметров обнаруженных радиосигналов;
на фиг. 2 - порядок построения линии положения ИРИ - окружности Апполония;
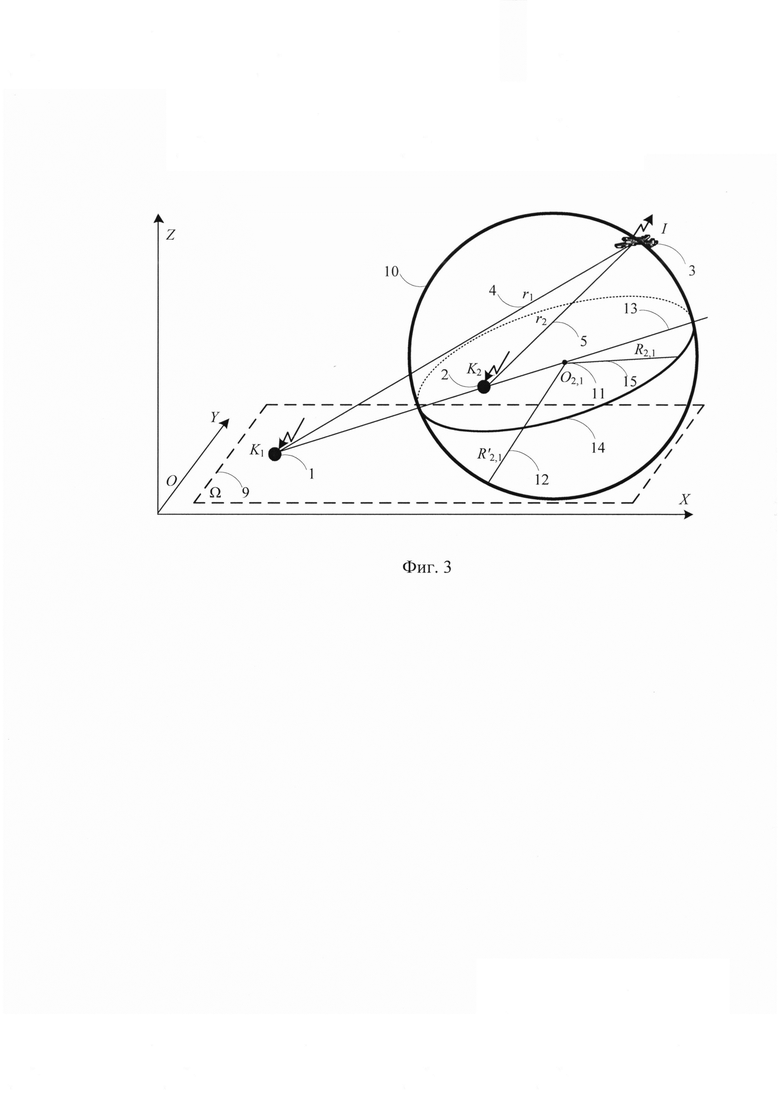
на фиг. 3 - порядок построения ССП ИРИ, за счет вращения окружности Апполония вокруг оси, соединяющей ее фокусы.
Сущность предлагаемого способа состоит в следующем. При установке ИРИ I на подвижном объекте, например, на ЛА, ИРИ излучает радиосигналы в известной полосе частот ΔF.
Измерители с известными координатами, осуществляют прием радиосигналов согласованным с ИРИ трактом.
Геометрическая основа системы измерения координатно-информативных параметров радиосигналов, в качестве которых используют АНЭП, отображена на фиг. 1, которая включает: 3-х мерную ДСК OXYZ, выбранную так, чтобы плоскость OXY совпадала с поверхностью земли Ω 9 (см. фиг. 1), а ось OZ - направлена вверх; две точки нахождения измерителей АНЭП K1 1 (см. фиг. 1) и K2 2 (см. фиг. 1) с известными координатами (x1; y1; z1) и (x2; y2; z2); ИРИ I расположенный на ЛА 3 (см. фиг. 1), координаты которого (xи; yи; zи) необходимо определить.
На фиг. 1 обозначены расстояния от K1 и K2 до I как r1 4 (см. фиг. 1) и r2 5 (см. фиг. 1) соответственно, а также высоты измерителей K1, K2 и высота ИРИ I, отсчитываемые от поверхности земли Ω, которые в выбранной системе координат равны z1 6 (см. фиг. 1), z2 7 (см. фиг. 1) zи 8 (см. фиг. 1) соответственно.
Используя измеренные АНЭП и известные координаты двух измерителей с K1 и K2 возможно построения линии положения ИРИ - окружности Апполония.
Для построения окружности Апполония 10 (см. фиг. 2) вводят вспомогательную 2-мерную ДСК O'X'Y' (см. фиг. 2) в плоскости, которая включает точки K1, K2 и I.
Аналитическая интерпретация алгоритма построения окружности Апполония раскрыта в приложении А, которая сводится к нахождению в ДСК O'X'Y' значений абсциссы а'2,1 и ординаты b'2,1 центра O2,1 11 (см. фиг. 2) и значения радиуса  12 (см. фиг. 2).
12 (см. фиг. 2).
Полученная окружность Апполония с фокусами в точках K1 и K2, представляет собой набор точек, обладающих общим свойством, выражающимся в том, что при нахождении в любой этой точке указанной окружности ИРИ I, коэффициент окружности Апполония k2,1 будет одинаковым. Следовательно, наличие этой окружности снижает неопределенность нахождения ИРИ I. Для последующего нахождения координат строят вторую окружность Апполония, наличие которой сводит неоднозначность определения координат ИРИ до двух точек (две окружности в общем случае пересекаются в двух точках). Полностью устраняет неоднозначность наличие третьей окружности Апполония.
Определение координат ИРИ на основе 4-х измерений и построения 3-х окружностей Апполония возможно только в том случае, когда априорно известна высота ИРИ. Однако, при решении задачи в 3-х мерном пространстве, в общем случае высоты I, K1, и K2 не равны друг другу, а координаты ИРИ I априорно неизвестны, поэтому не представляется возможным выбора плоскости, образованной точками I, K1, и K2 и выбрать 2-мерную ДСК O'X'Y'.
В заявленном способе, для условий, когда высоты измерителей различны, а высота ИРИ - произвольная, для повышения точности определения координат ИРИ, используют СПП ИРИ, построенные вращением окружностей Апполония вокруг осей, соединяющих соответствующие фокусы. При этом фокусы окружностей Апполония соответствуют точкам расположения измерителей в 3-мерном пространстве в момент измерения.
Аналитическая интерпретация алгоритма построения СПП ИРИ, за счет вращения окружности Апполония вокруг оси, соединяющей ее фокусы, раскрыта в приложении Б, которая сводится к нахождению в системе координат OXYZ значений абсциссы a2,1, ординаты б2,1 и аппликата с2,1 центра O2,1 и значения радиуса R2,1 13 (см. фиг. 3) окружности Апполония.
Полученная СПП ИРИ 14 (см. фиг. 3), образованная вращением окружности Апполония 10 вокруг оси K1K2 15 (см. фиг. 3), представляет собой набор точек, повторяющих свойство точек окружности Апполония, выражающимся в том, что при нахождении в любой точке этой СПП коэффициент k2,1 окружности Апполония будет одинаковым.
Наличие одной СПП ИРИ приводит к неоднозначности относительно координат ИРИ, выражающейся набором точек, образующих данную СПП ИРИ.
Наличие второй СПП ИРИ снижает неоднозначность относительно координат ИРИ до набора точек, образующих окружность, так как две сферы, в общем случае, пересекаются по окружности.
Наличие третьей СПП ИРИ снижает неоднозначность относительно координат ИРИ до двух точек, так как три сферы, в общем случае, пересекаются в двух точках.
Наличие четвертой СПП ИРИ полностью устраняет неоднозначность относительно координат ИРИ, так как четыре сферы в общем случае пересекаются в одной точке.
Таким образом, минимально необходимые количество измерений АНЭП для определения координат ИРИ, равно пяти, тогда возможно построение четырех СПП ИРИ. Однако, в общем случае, существует возможность проведения N≥5 АНЭП и формирования N - 1 СПП ИРИ. При этом точность определения координат ИРИ за счет избыточности независимых измерений будет возрастать, а время, затрачиваемое на определение координат ИРИ будет увеличиваться.
Для реализации заявленного изобретения последовательно выполняют следующую последовательность действий:
1. Выбирают район ведения радиомониторинга.
2. Размещают не менее пяти измерителей АНЭП Kn на позициях с известными координатами xKn, yKn, zKn, где n=1…N - номер измерителя АНЭП.
3. Формируют N - 1 отличающихся друг от друга пар АНЭП, при этом одним из элементов в каждой из пар выбирают g-ю опорную АНЭП.
4. Для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония как отношение АНЭП, перемноженное на обратное отношение высот измерителей АНЭП относительно поверхности земли.
5. На основе коэффициентов окружностей Апполония формируют N - 1 сферических поверхностей положения (СПП) ИРИ.
6. В качестве координат ИРИ в пространстве принимают координаты точки пересечения N - 1 указанных СПП ИРИ.
В качестве примера реализации заявленного изобретения в приложении В представлена аналитическая интерпретация алгоритма построения четырех СПП ИРИ и нахождения точки их пересечения. В рассмотренном примере в качестве опорной выбирают первую АНЭП. В качестве опорной возможен выбор любой g-й, где g=1, 2, …, N, АНЭП. При этом результат измерений не изменяется.
При размещении измерителей АНЭП на позициях с известными координатами решают противоречивую задачу: с одной стороны - расстояние между измерителями необходимо увеличивать для повышения точности определения координат ИРИ, с другой стороны - такое расстояние необходимо уменьшать, для повышения совместной зоны радиовидимости измерителей. Целесообразным представляется выбор расстояния между точками приема в интервале от двух до пяти км.
В аналитической интерпретации алгоритма нахождения точки пересечения четырех СПП ИРИ, образованных вращением окружностей Апполония вокруг осей, соединяющих соответствующие фокусы, сводят к решению системы уравнений (В.4). Алгоритм решения такой системы, выходными параметрами которого являются координаты ИРИ хи, yи и zи, также представлен в приложении В.
Дополнительно повышают точность определения координат ИРИ за счет избыточности измерений. Указанные измерения АНЭП возможно проводить каждым из N измерителей М≥2 раз. Такие измерения можно считать независимыми. На основе результатов проведенных измерений составляют  (где
(где  - число всех различных сочетаний из 2 по N) уравнений типа (Б.4), количество которых равно:
- число всех различных сочетаний из 2 по N) уравнений типа (Б.4), количество которых равно:
Данное обстоятельство позволяет повысить точность определения координат ИРИ, при этом порядок реализации описанного в приложении В итерационного алгоритма не изменяют.
Имитационное моделирование заявленного способа определения координат ИРИ показало повышение точности определения координат ИРИ по сравнению со способом прототипом на 10…20% (в зависимости от высот расположения измерителей АНЭП и высоты ИРИ), при решении задачи в 3-мерном пространстве в условиях наложения ограничения на время, затрачиваемое на определение координат ИРИ, что указывает на возможность достижения указанного технического результата.
Источники информации:
1. Логинов Ю.И., Екимов О.Б., Антипин Б.М., Гриценко А.А., Портнаго Л.Б. Разностно-энергетический способ определения координат местоположения источников радиоизлучения Патент RU №2505835, опубл. 27.01.2014 Бюл. №3.
2. Волков Р.В., Саяпин В.Н., Севидов В.В. Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов. Патент RU №2605457, опубл. 20.12.2016. Бюл. №35.
3. Агиевич С.Н., Дворников С.В., Земсков Д.С., Севидов В.В., Федоренко И.В. Способ определения координат источника радиоизлучения с использованием летательного аппарата. Патент RU №2644580, опубл. 13.02.2018 Бюл. №5.
4. Богдановский С.В., Волков Р.В., Севидов В.В., Симонов А.Н. Способ поляризационного пеленгования радиосигналов. Патент RU №2624449, опубл. 4.07.2017. Бюл. №19.
5. Агиевич С.Н., Земсков Д.С., Севидов В.В. Определение координат источников радиоизлучения с использованием беспилотного летательного аппарата. Инновационная деятельность в Вооруженных Силах Российской Федерации: Труды всеармейской научно-практической конференции. 11-12 октября 2017 года, - СПб.: ВАС, 2017. С. 37-39.
Приложение А
Аналитическая интерпретация алгоритма построения линии положения ИРИ - окружности Апполония
АНЭП Епр в точке приема, в соответствии с квадратичной формулой Введенского, равна:

где Ри - мощность радиосигнала на выходе радиопередатчика ИРИ, Gи и Gпр - коэффициенты усиления антенн ИРИ и приемника (в разах) соответственно; λ - длина волны радиосигнала, r - расстояние между ИРИ и приемником, hи и hпр - высоты антенн ИРИ и приемника соответственно.
Для построения окружности Апполония вводят декартову систему координат O'X'Y' (см. фиг. 2) в плоскости, которая включает точки I, K1 и K2.
Полагают, что в системе координат O'X'Y', точки K1, и K2 имеют следующие декартовы координаты: (x'1; y'1) и (x'2; y'2) соответственно. Тогда выражение (А.1) расчета амплитуд напряженности поля E1 и E2 в точках приема для каждого из двух измерителей K1, и K2 записывают в виде:


где z1, z2 и zи - высоты измерителей K1, и K2 и высота ИРИ I, отсчитываемые от поверхности земли Ω, (x'и; y'и) - неизвестные координаты ИРИ в системе координат О'X'Y'.
Разделив правые и левые части уравнения (А.3) на правые и левые части уравнения системы (А.2), приняв в качестве допущения то, что коэффициенты усиления антенны ИРИ в направлении на K1, и K2 равны между собой (такое допущение справедливо в случае, когда антенна ИРИ ненаправленная, а также в случае, когда расстояния r1 и r2 велики по сравнению с расстояниями между K1, и K2), получают:

где k2,1 - введенный коэффициент окружности Апполония, который можно определить, на основе измеренных амплитуд напряженности поля E1 и E2 и высот z1 и z2 каждого из измерителей K1, и K2.
Уравнение (A.4) после арифметических преобразований представляется уравнением окружности Апполония 10 (см. фиг. 1):

где а'2,1, b'2,1 - абсцисса и ордината центра, а  - радиус окружности Апполония, которые, в свою очередь равны:
- радиус окружности Апполония, которые, в свою очередь равны:
Приложение Б
Аналитическая интерпретация алгоритма построения СПП ИРИ, за счет вращения окружности Аполония вокруг оси, соединяющей ее фокусы
Полагают, что в системе координат OXYZ, точки K1, и K2 имеют следующие известные декартовы координаты: (x1; y1; z1) и (x2; y2; z2) соответственно. Тогда выражение (АЛ) для каждого из двух измерителей записывают в виде:


где (xи; yи; zи) - неизвестные координаты ИРИ в системе координат OXYZ.
Разделив правые и левые части уравнения (Б.2) на правые и левые части уравнения системы (Б.1) получают:

Уравнение (Б.3) после арифметических преобразований представляется уравнением СПП ИРИ 14 (см. фиг. 3), образованной вращением окружности Апполония 10 вокруг оси K1K2:

где a2,1, b2,1, c2,1 - абсцисса, ордината и аппликата центра, a R2,1 - радиус СПП ИРИ, которые, в свою очередь равны:


Приложение В
Аналитическая интерпретация алгоритма построения четырех СПП ИРИ и нахождения точки их пересечения
По аналогии с уравнением (Б.4), полученным в приложении Б выводят аналитические выражения для второй, третьей и четвертой СПП ИРИ, образованными вращением окружностей Апполония вокруг осей, соединяющих соответствующие фокусы:



где a3,1, b3,1, c3,1 - абсцисса, ордината и аппликата центра второй СПП ИРИ, a4,1, b4,1, c4,1 - абсцисса, ордината и аппликата центра третьей СПП ИРИ, a5,1, b5,1, c5,1 - абсцисса, ордината и аппликата центра четвертой СПП ИРИ, R3,1, R4,1, R5,1 _ радиусы второй, третьей и четвертой СПП ИРИ, которые, в свою очередь равны:






где 
 - введенные коэффициенты окружностей Апполония.
- введенные коэффициенты окружностей Апполония.
Полученные выражения (Б.4), (B.1), (В.2) и (В.3) образуют систему уравнений:
Для решения системы уравнений (В.4) применяют следующий итерационный алгоритм, включающий следующие этапы:
Этап 1. Задают произвольные, но для быстрой сходимости наиболее правдоподобные опорные координаты ИРИ I x'и, y'и, z'и.
Этап 2. Определяют значения функций  ,
,  ,
,  и
и  системы уравнений (В.4) в точке с координатами x'и, y'и, z'и:
системы уравнений (В.4) в точке с координатами x'и, y'и, z'и:




Этап 3. Рассчитывают невязки n2,1, n3,1, n4,1, и n5,1 по формулам

Этап 4. Составляют систему уравнений на основе разложений функций  ,
,  ,
,  и
и  в ряды Тейлора с точностью до первых производных:
в ряды Тейлора с точностью до первых производных:
где Δx, Δy, Δz - неизвестные значения приращений соответствующих координат требуемых для минимизации невязок.
Частные производные в выбранной опорной точке равны:




Этап 5. Решают систему уравнений (В.5), с помощью метода наименьших квадратов, для чего предварительно записывают ее в матричной форме:

где  - вектор столбец искомых приращений соответствующих координат,
- вектор столбец искомых приращений соответствующих координат,  - вектор столбец невязок соответственно «Т» - знак транспонирования вектора (матрицы),
- вектор столбец невязок соответственно «Т» - знак транспонирования вектора (матрицы),
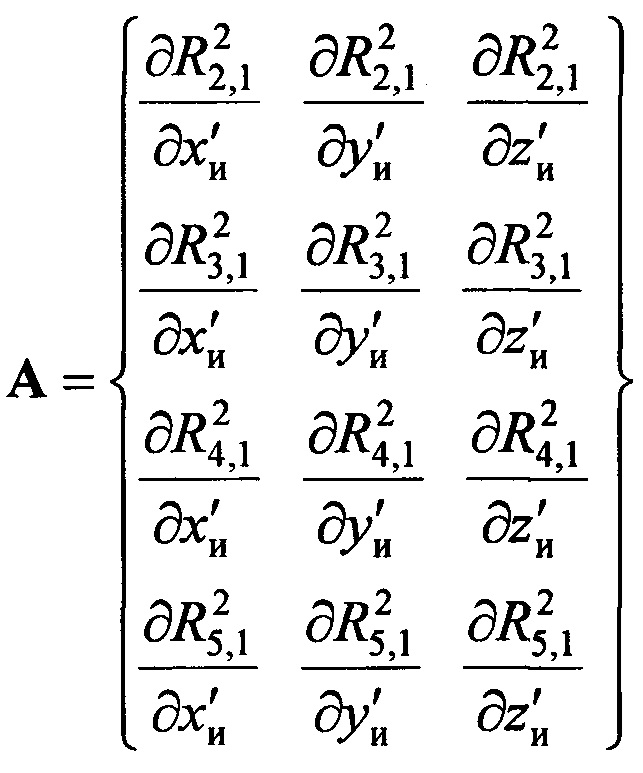 - матрица частных производных функций
- матрица частных производных функций  ,
,  ,
,  и
и  в точке с координатами x'и, y'и, z'и.
в точке с координатами x'и, y'и, z'и.
Обе части уравнения (В.6) умножают на транспонированную матрицу системы АT:

Затем обе части уравнения (В.7) умножают на матрицу (АТА)-1. Если эта матрица существует, то система определена.

С учетом того, что  - единичная матрица, получают решение системы уравнений (В.6) в следующем матричном виде:
- единичная матрица, получают решение системы уравнений (В.6) в следующем матричном виде:

Этап 6. Определяют новые опорные координаты ИРИ I x'', y'' и z'':

Этапы 1…6 в совокупности образуют первую итерацию. Далее итерации повторяют, используя каждый раз новые опорные координаты ИРИ I, полученные на этапе 6 предыдущей итерации. Количество необходимых итераций L зависит от корректности выбора начальных опорных координаты (этап 1) и требуемой точности определения координат ИРИ. С точностью связан шаг итерации dL, определяемый как расстояние между точками с текущими опорными координатами ИРИ и предыдущими опорными координатами ИРИ. Шаг итерации сравнивают с предварительно заданным порогом. По результатам сравнения принимают решение: если шаг итерации больше порога - производят следующую итерацию, если меньше -завершают алгоритм. Необходимое число итераций для решения задачи координатометрии по определению координат ИРИ, как правило, не превышает четырех.
При завершении итераций в качестве координат ИРИ xи, yи и zи выбирают значения опорных координат на последней итерации, которые являются выходными результатами представленного алгоритма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2644580C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2714502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2023 |
|
RU2822686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата с использованием триортогональной рамочной антенной системы | 2024 |
|
RU2824445C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ В УСЛОВИЯХ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ РАДИОВОЛН | 2023 |
|
RU2805566C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2006 |
|
RU2306579C1 |
Изобретение относится к радиотехнике, а именно к способам определения местоположения источника радиоизлучения (ИРИ), и может быть использовано в навигационных, пеленгационных, локационных средствах для определения местоположения подвижного ИРИ на произвольной высоте, в частности, расположенного на летательном аппарате. Технический результат изобретения - разработка высокоточного способа определения координат ИРИ в пространстве на основе использования сферических поверхностей положения (СПП) ИРИ, формируемых вращением окружностей Апполония вокруг осей, соединяющих соответствующие фокусы. При этом в качестве фокусов окружностей Апполония выступают точки расположения измерителей в 3-мерном пространстве в условиях наложения ограничения на время, затрачиваемое на определение координат ИРИ. Способ основан на приеме радиосигналов ИРИ в заданной полосе частот ΔF с помощью N≥5 измерителей с известными координатами и запоминании N≥5 координатно-информативных параметров, в качестве которых используют амплитуды напряженностей электрического поля в местах расположения измерителей, при этом вычисляют N-1 коэффициентов окружностей Апполония, формируют N-1 СПП ИРИ, а в качестве координат ИРИ в пространстве принимают координаты точки пересечения N-1 указанных СПП ИРИ. Приложения А, Б, В, 3 ил.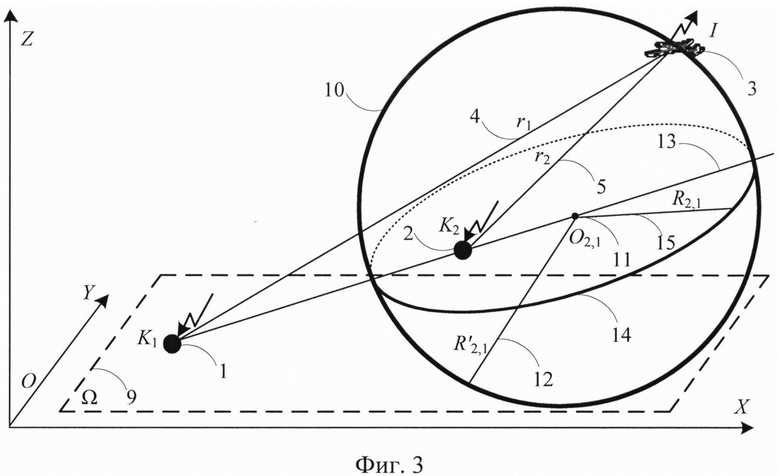
Способ определения координат источника радиоизлучения (ИРИ), заключающийся в том, что выбирают 3-мерную декартову систему координат (ДСК) для производства измерений и расчетов, принимают радиосигнал ИРИ в заданной полосе частот ΔF, измеряют и запоминают N≥5 амплитуд напряженностей электрического поля (АНЭП)  где n=1…N, создаваемых ИРИ в точках приема, выделяют в качестве опорной g-ю, где g=1, 2, …, N, АНЭП, формируют N-1 отличающихся друг от друга пар АНЭП, при этом одним из элементов в каждой из пар выбирают g-ю опорную АНЭП, для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония, используя отношения соответствующих АНЭП, на основе коэффициентов окружностей Апполония формируют N-1 сферических поверхностей положения (СПП) ИРИ, используя указанные СПП вычисляют координаты ИРИ, отличающийся тем, что предварительно выбирают район ведения радиомониторинга, устанавливают на земной поверхности N≥5 измерителей АНЭП на позициях с известными координатами xKn, yKn, zKn, где n=1…N - номер измерителя АНЭП, для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония как отношение АНЭП, перемноженное на обратное отношение высот измерителей АНЭП относительно поверхности земли, а в качестве фокусов окружности Апполония принимают координаты точек, соответствующих координатам измерителей АНЭП, на основе коэффициентов окружностей Апполония и известных координат измерителей АНЭП формируют N-1 СПП ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих соответствующие фокусы, а в качестве координат ИРИ в пространстве принимают координаты точки пересечения N-1 указанных СПП ИРИ.
где n=1…N, создаваемых ИРИ в точках приема, выделяют в качестве опорной g-ю, где g=1, 2, …, N, АНЭП, формируют N-1 отличающихся друг от друга пар АНЭП, при этом одним из элементов в каждой из пар выбирают g-ю опорную АНЭП, для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония, используя отношения соответствующих АНЭП, на основе коэффициентов окружностей Апполония формируют N-1 сферических поверхностей положения (СПП) ИРИ, используя указанные СПП вычисляют координаты ИРИ, отличающийся тем, что предварительно выбирают район ведения радиомониторинга, устанавливают на земной поверхности N≥5 измерителей АНЭП на позициях с известными координатами xKn, yKn, zKn, где n=1…N - номер измерителя АНЭП, для каждой сформированной пары АНЭП вычисляют коэффициент окружности Апполония как отношение АНЭП, перемноженное на обратное отношение высот измерителей АНЭП относительно поверхности земли, а в качестве фокусов окружности Апполония принимают координаты точек, соответствующих координатам измерителей АНЭП, на основе коэффициентов окружностей Апполония и известных координат измерителей АНЭП формируют N-1 СПП ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих соответствующие фокусы, а в качестве координат ИРИ в пространстве принимают координаты точки пересечения N-1 указанных СПП ИРИ.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2644580C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| US 6791493 B1, 14.09.2004 | |||
| WO 2005045459 A3, 07.07.2004 | |||
| JP 8036040 A, 06.02.1996 | |||
| JP 2011112370 A, 09.06.2011. | |||

