ев.Для этого гибкие тяги выполне- ны в виде последовательно соединенных жил и блоков,Ветви каждой жилы, например 22, последующей за первой, охватывают во встречном направлении блоки 34, 35, 39 и 40, выполненные с равным диаметром. Жила 27 охватывает блоки 44 и 46. Все эти блоки установлены на дополнительных поперечных планках 36, 41 и 45, расположенных соосно оси вращения шарнира, установленного в одной плоскости с
1
Изобретение относится к робототехнике и предназначено для использования в роботах с антропоморфной структурой исполнительного органа и большим числом степеней подвижности.
Целью изобретения является расширение кинематических возможностей руки манипулятора, в которой используются кинематические пары пятого класса, оси вращения которых расположены во взаимно перпендикулярных плоскостях, за счет исключения взаимного влияния перемещаемых звеньев.
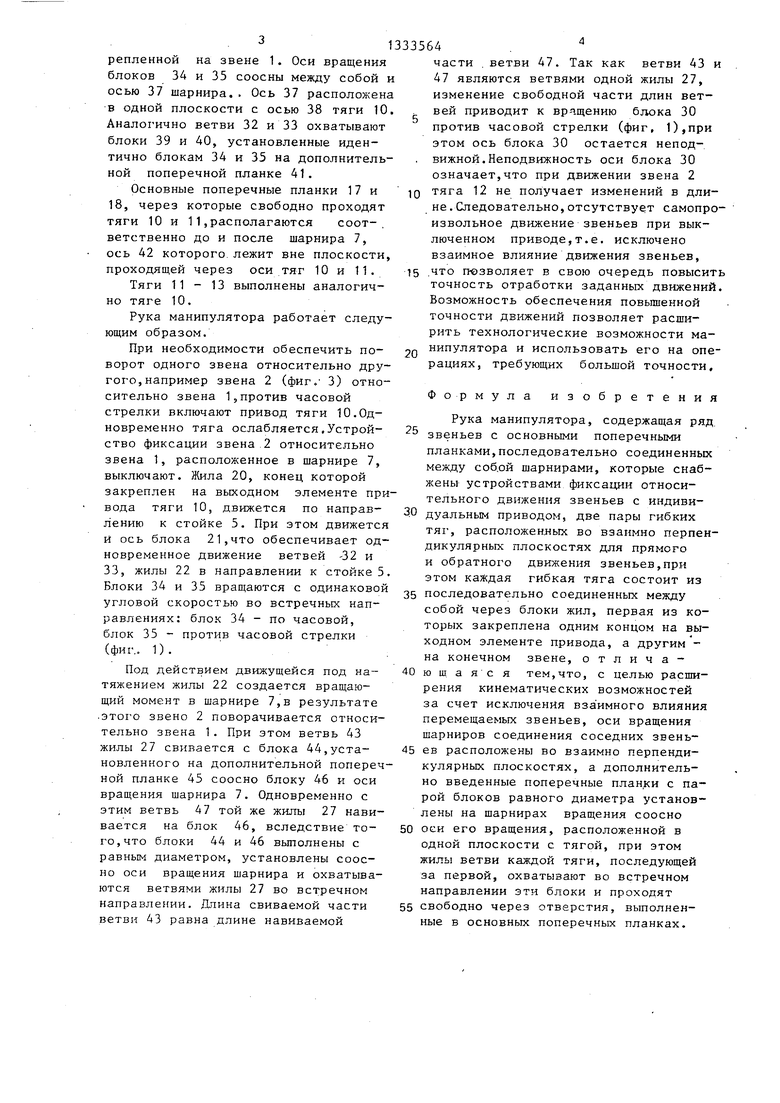
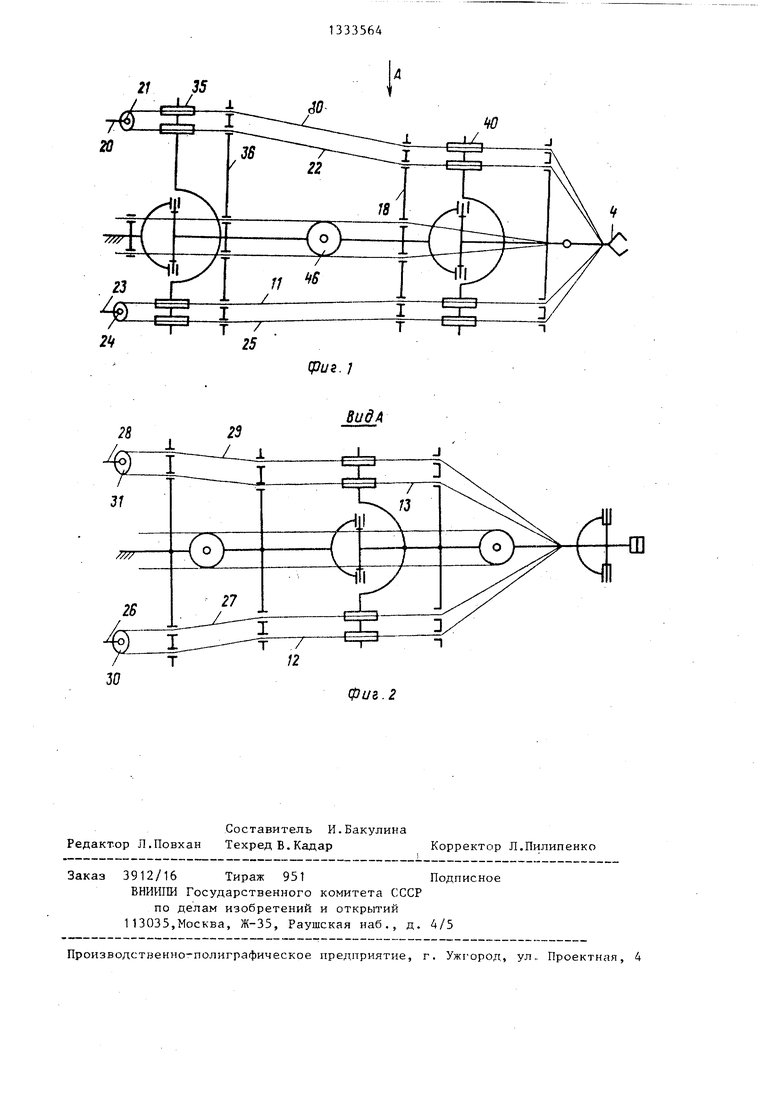
На фиг. 1 изображена кинематическая схема руки манипулятора, на фиг . 2 вид А на фиг. 1; на фиг. 3 - прост- ранственно е изображение кинематической схемы руки манипулятора.
Рука манипулятора содержит подвижные звенья 1- 4 и неподвижную стойку 5. Звенья соединены между собой и стойкой шарнирами 6-9. Оси шарниров 6 и 8, 7 и 9 параллельны между собой. Оси шарниров 6 и 7, 8 и 9 взаимно перпендикулярны.Каждый шарнир снабжен устройством фиксации относительного движения звеньев с индивидуальным приводом (не показаны) . Звенья снабжены приводом (не показаны), расположенным на неподвижном основании,с приводом звенья связаны через гибкие тяги 10 -13. Тяги 10 и 11 предназначены для обеспечения прямого и обратного движений звеньев 2 и 4 в вертикальной плоскости. Тяги 12 и 13 предназначены для обеспечения прямого и обрат33564
тягой. Ветви жил свободно проходят через отверстия в основных поперечных планках 15 - 18, а концы ветвей жил закреплены соответственно на последней планке приводимого, в движение звена. Такая схема выполнения тяг и жил обеспечивает компенсацию изменения длины ветвей каждой жилы, проходящей над шарниром, за счет аналогичного изменения длины другой ветви этой же жилы,под шарниром.3 ил.
ного движений звеньев в горизонтальной плоскости, конидз тяг закреплены на звене 3. Концы тяг 10 и 11 закреплены на звене 4. Тяги свободно проходят через отверстия в основных поперечных планках 14 - 19,жестко закрепленных на звеньях. Каждая тяга состоит из двух жил и блока.Тяга 10 состоит из жилы 20, закрепленной одним концом на оси установленного свободно ) блока 21, а другим - на выходном элементе привода и жилы 22, огибающей этот блок.
5 Тяга 11 состоит из жилы 23, блока 24 и жилы 25.Тяги 12 и 13 соответственно состоят из жил 26, 27 и 28, 29 блоков 30 и 31. Концы жил 23, 26 и 28 -закреплены на выходных элеQ ментах соответствующих приводов. Ветви жил 22, 25,27 и 29 свободно проходят через отверстия в основных поперечных планках. Жилы 22 и 27 проходят свободно через отверстия в
5 планках 17,18 и 19, Жилы 25 и 29 проходят через отверстия в планках 14,15 и 16.
22 ог Ибает блок 21, после 0 чего ее ветви 32 и 33 охватывают блоки 34 и 35, вьтолненные с равным диаметром, и установлены на дополнительной поперечной планке 36,при этом направление охвата ветвями жил встречное, что обеспечивает расположение точек схода с блоков ветвей по разные стороны от оси дополнительной поперечной планки 36, жестко закрепленной на звене 1. Оси вращения блоков 34 и 35 соосны между собой и осью 37 шарнира., Ось 37 расположена в одной плоскости с осью 38 тяги 10 Аналогично ветви 32 и 33 охватывают блоки 39 и 40, установленные идентично блокам 34 и 35 на дополнительной поперечной планке 41.
Основные поперечные планки 17 и 18, через которые свободно проходят тяги 10 и 11,располатаются соот-. ветственно до и после шарнира 7, ось 42 которого лежит вне плоскости проходящей через оси тяг 10 и 11.
Тяги 11 - 13 выполнены аналогично тяге 10.
Рука манипулятора работает следующим образом.
При необходимости обеспечить поворот одного звена относительно другого, например звена 2 (фиг.- 3) относительно звена 15 против часовой стрелки включают привод тяги 10.Одновременно тяга ослабляется.Устройство фиксации звена 2 относительно звена 1, расположенное в шарнире 7, выключают. Жила 20, конец которой закреплен на выходном элементе привода тяги 10, движется по направлению к стойке 5. При этом движется И ось блока 21,что обеспечивает одновременное движение ветвей -32 и 33, жилы 22 в направлении к стойке 5 Блоки 34 и 35 вращаются с одинаковой угловой скоростью во встречных направлениях: блок 34 - По часовой, блок 35 - против часовой стрелки (фиг.. 1).
Под действием движущейся под натяжением жилы 22 создается вращающий момент в шарнире 7,в результате ЭТОГО звено 2 поворачивается относительно звена 1. При этом ветвь 43 жилы 27 свивается с блока 44,установленного на дополнительной поперечной планке 45 соосно блоку 46 и оси вращения шарнира 7. Одновременно с этим ветвь 47 той же жилы 27 навивается на блок 46, вследствие того, что блоки 44 и 46 выполнены с равным диаметром, установлены соосно оси вращения шарнира и охватываются ветвями жилы 27 во встречном направлении. Длина свиваемой части ветви 43 равна длине навиваемой
0
5
0
5
части ветви 47. Так как ветви 43 и 47 являются ветвями одной жилы 27, изменение свободной части длин ветвей приводит к врпщению блока 30 против часовой стрелки (фиг, 1),при этом ось блока 30 остается неподвижной. Неподвижность оси блока 30 означает,что при движении звена 2 тяга 12 не получает изменений в длине. Следовательно, отсутствует самопроизвольное движение звеньев при выключенном приводе,т.е. исключено взаимное влияние движения звеньев, .что позволяет в свою очередь повысить точность отработки заданных движений. Возможность обеспечения повышенной точности движений позволяет расширить технологические возможности манипулятора и использовать его на операциях, требующих большой точности.
Формула изобретения
Рука манипулятора, содержащая ряд. звеньев с основнЕ 1ни поперечными планками,последовательно соединенных между соб.ой шарнирами, которые снабжены устройствами фиксации относительного движения звеньев с индивидуальным приводом, две пары гибких тяг, расположенных во взаимно перпендикулярных плоскостях для прямого и обратного движения звеньев,при этом каждая гибкая тяга состоит из
5 последовательно соединенных между собой через блоки жил, первая из которых закреплена одним концом на выходном элементе привода, а другим - на конечном звене, о т л и ч а 0 ю щ а я с я тем,что, с целью расширения кинематических возможностей за счет исключения вза имного влияния перемещаемых звеньев, оси вращения шарниров соединения соседних звень5 ев расположены во взаимно перпендикулярных плоскостях, а дополнительно введенные поперечные планки с парой блоков равного диаметра установлены на шарнирах вращения соосно
0 оси его вращения, расположенной в одной плоскости с тягой, при этом ЖИЛЬ ветви каждой тяги, последующей за первой, охватывают во встречном направлении эти блоки и проходят
5 свободно через отверстия, выполненные в основных поперечных планках.
0
21 35
(pus. /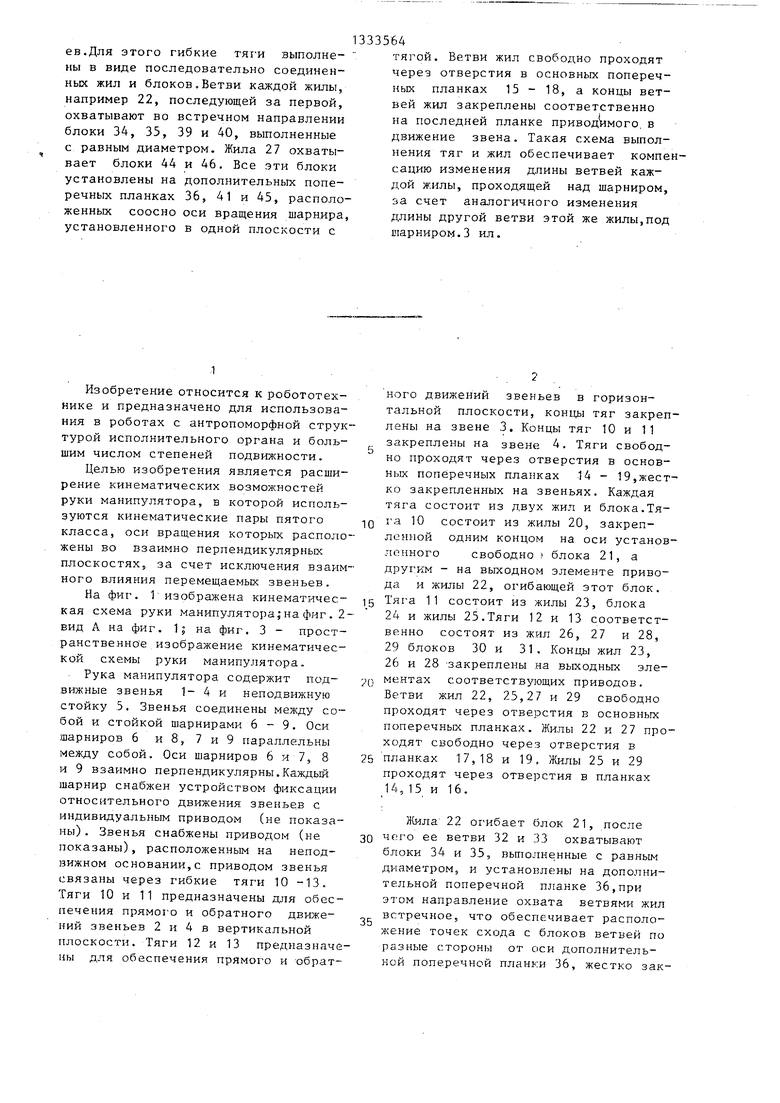
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1404324A1 |
| Рука манипулятора | 1985 |
|
SU1306705A1 |
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
Изобретение относится к робототехнике и предназначено для использования в роботах с антропоморфной структурой исполнительного органа и большим числом степеней подвижности. Целью изобретения является расширение кинематических возможностей руки манипулятора за счет исключения взаимного влияния перемещаемых звень22 П Ю 35 30 33 (Л .3
Редактор Л.Повхан
Составитель И.Бакулина Техред В.Кадар
Заказ 3912/16 Тираж 951Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035,Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул„ Проектная, 4
Фив. 2
Корректор Л.Пилипенко
| Рука манипулятора | 1984 |
|
SU1225778A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
