1
Изобретение относится к машиностроению и может быть использовано для крепления корпуса реактора на фундаменте.
Целью изобретения является повышение надежности системы регулирования положения корпуса на фундаменте
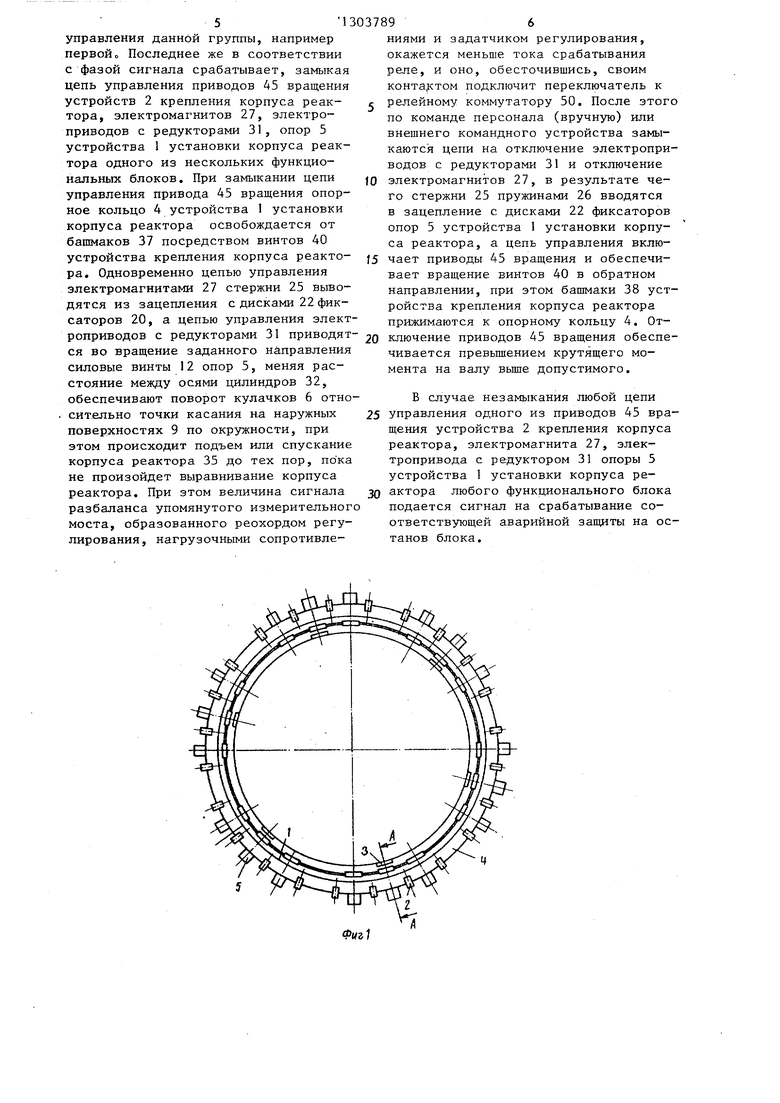
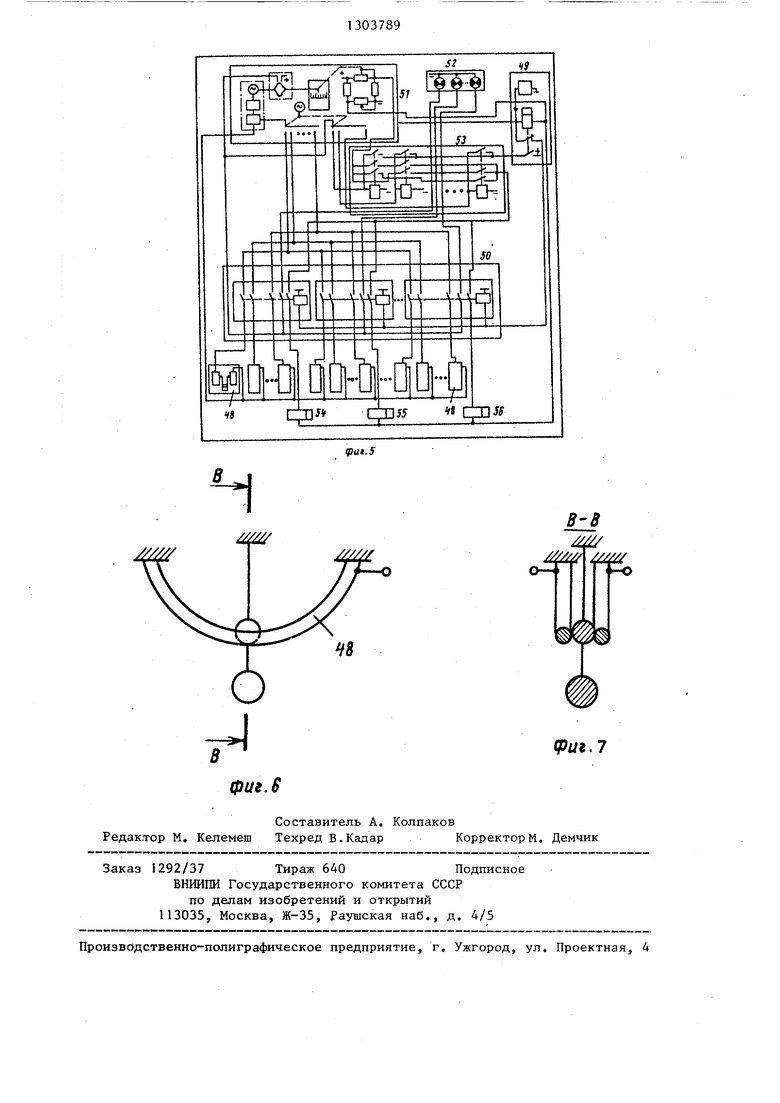
На фиг. 1 изображена система автоматического регулирования положения корпуса реактора на фундаменте (вид в плане); на фиг, 2 - устройство установки, регулирования и крепления корпуса (сечение А-А на фиг, 1); на фиг, 3 - установка кулачков в направляющих опорного кольца (сечение Б-Б на фиг, 2); на фиг, 4 - фиксатор положения силового винта опоры (узел I на фиг, 2); на фиг, 5 - блок-схема устройства управления и контроля; на фиг, 6 - кинематическая схема датчика контроля положения корпуса; на фиг,7- сечение В-В на фиг, 6.
Система автоматического регулирования положения корпуса реактора на фундаменте содержит шесть функциональных блоков, расположенных диаметрально противоположно (фиг, 1)о Количество блоков всегда четное и определяется диаметром корпуса реактора.
13
Каждый функциональный блок содержит устройство 1 установки корпуса реактора, устройства 2 крепления реактора, устройство 3 контроля положения и управления положения корпуса реактора.
Устройство 1 установки корпуса реактора содержит опорное кольцо 4 и опоры 5, Каждая опора 5 содержит: два кулачка 6, каждый из которых имеет концентрическую нижнюю часть 7, профильную верхнюю часть 8, наружную сферическую поверхность 9 по окружности, гладкое коническое отверстие 10, цилиндрическую расточку П, силовой винт 12 с упорным буртом 13, упорной винтовой нарезкой 14, хвостовиком 15; верхнюю обойму 16 с вогнутой сферической прямолинейной расточкой 19; фиксатор 20 в виде подшипников 21, диска 22 с цилиндричес-вошла в вогнутую сферическую прямоликими отверстиями 23 и винтовой нарез-нейную расточку 19 нижней обоймы 18,
кой 24, стержня 25, пружины 26, элек-а диск 22 с подшипниками 21 вошел тромагнита 27; корпус 28, упорную 55 между ребрами корпуса 28, Сверху на
шайбу 29; муфту 30; электропривод скулачки 6 устанавливают верхнюю обойму
редуктором 31; цилиндр 32 с упорной16 так, чтобы вогнутая сферическая
винтовой нарезкой в отверстии,прямолинейная расточка 17 вошла в за
а -
fO
20
25
303789 2
Каждое устройство 2 крепления корпуса реактора содержит шпонку с накладкой 33, шпоночный паз 34 корпуса реактора 35, Г-образную стой5 ку 36 с резьбовым отверстием 37, башмак 38 со сферическим углублением 39, винт 40, один конец которого заканчивается полусферой 41, другой- хвостовиком 42, муфту 43, опорную стойку 44 с приводом 45 вращения, опорный бурт 46 реактора. Корпус 28 каждого блока устанавливается на фундаменте 47,
Устройство 3 контроля и управления
содержит; датчики 48 положения с ре- зистивным полутором, контактным шаром, клеммой, стержнем и регулировочным шаром; узел 49 управления коммутатором с переключателем и реле блокировки; релейный коммутатор 50 с групповым реле; многоточечный сигнализирующий, регулируюш 1й и самопи- шуш;ий прибор 51 со спаренными переключателями, измерительной схемой, сигнализирующим механизмом, имеющим сигнальные контакты минимального и максимального значения параметра, ре- гистрируюш;им механизмом, реохордом регулирования, задатчиком регулирования, нагрузочным сопротивлением; узел 52 светозвуковой сигнализации; узел 53 памяти, имеющий реле памяти; выходные фазочувствительные реле управления: первое 54, второе 55, пос35 леднее 56,
Каждую опору 5 устройства 1 установки корпуса реактора собирают следующим образом,
В корпус 28 устанавливают нижнюю
40 обойму 18, В цилиндрические расточки 11 кулачков 6 устанавливают цилиндры 32, На концы силового винта 12 наворачивают цш: индры 32 вместе с кулачками 6 так, чтобы силовой винт 12
45 прощел через гладкие конические отверстия 10 кулачков 6, диск 22 вместе с подшипниками 21, со стороны торца винта 12 устанавливают упорную шайбу 29.. Затем кулачки 6 с винтом 12 уста50 навливают в корпус 28 так, чтобы наружная сферическая поверхность 9
30
цепление с наружной сферической поверхностью 9 по окружности кулачков 6.
На корпусе 28 устанавливают и закрепляют стержень 25, пружину 26, электромагнит 27 фиксатора 20. На винт 12 устанавливают муфту 30, а на корпус 28 устанавливают и закрепляют электродвигатель с редуктором 31 и соединяют их с силовым винтом 12 посредством муфты 30.
Систему автоматического регулирования положения корпуса реактора монтируют следующим образом.
На фундаменте 47 устанавливают по окружности и жестко закрепляют опоры 5. На опоры 5 устанавливают опорное кольцо 4 и корпус реактора 35 так, чтобы опорный бурт 46 оперся на опорное кольцо. На корпусе реактора уста навливают и закрепляют датчики положения корпуса реактора и монтируют схему устройства контроля положения корпуса реактора. Затем устанавливаю Г-образные стойки 36 по периметру окружности кольца 4 так, чтобы они вошли в пазы опорного кольца 4 -и же- стко закрепляют их на фундаменте 47. В Г-образные стойки 36 заворачивают винты 40 так, чтобы полусферы 41 вош ли в зацепление со сферическим углублением 39 башмака 38. На Г-образные стойки устанавливают и закрепляют опорные стойки 44 с приводом враще- ния 45 так, чтобы муфты 43 вошли в зацепление с хвостовиками 42 винтов 40. Каждый винт 40 приводом 45 вращения прижимает башмак 38 к опорному кольцу 4, Шпонки с накладкой 33 устанавливают и закрейляют на опорном кольце 4 так, чтобы они вопши в шпоночный паз 34 корпуса реактора 35.
Система автоматического регулирования положения корпуса реактора на фундаменте работает следующим обра- зом.
По команде персонала или внешнего командного устройства в узле 49 управления коммутатором запускается переключатель, который формирует управляющие сигналы на переключение в релейном коммутаторе 50 групповых реле. При выборе, например, первого группового реле через его.контакты и контакты переключателя прибора 51 производится подключение к его измерительной схеме соответствующих датчиков 48 положения корпуса реактора.
Контролируемым параметром здесь явля ется величина омического сопротивления между клеммами двух резистивных полуторов каждого датчика, соединенных последовательно через контактный шар. Поскольку полуторы каждого датчика, расположенные параллельно в вертикальной плоскости, соединены жестко с корпусом реактора, а контактный шар, помещенный между ними, соединен жестко со стержнем, на котором свободно при помощи шарнира, жестко соединенного с корпусом реактора, подвешен регулировочный щар, то при изменении положения корпуса реактора контактный шар будет оставаться в положении покоя, а резистив ные полуторы переместятся на величину смещения корпуса в вертикальной плоскости. Значение параметра каждого контролируемого датчика при помощ регистрирующего механизма фиксируется на бумажной ленте, где также печатаются номер данной группы и номер датчика группы.
При наличии отклонения контролируемого параметра по любому датчику 48 положения от заданного минимального или максимального значений в сигнализирующем механизме замыкаются соответствующие контакты. В результате через переключатель, соединенный последовательно с контактами, образуется цепь для возбуждения, например, nepBoi o реле памяти, которое затем через соответствующий замыкающий контакт и контакт реле блокировки становится на самоудержание. Кром того, через контакты, соединенные последовательно с контактом возбужденного группового реле, образуется цепь 52 для включения светозвуковой сигнализации данной группы. При наличии отклонения параметра от установки, заданной при помощи задат- чика регулирования, в измерительной диагонали моста, образованного реохордом регулирования, нагрузочными сопротивлениями и задатчиком регулирования, образуется сигнал, равный или превышающий ток срабатывания реле блокировки и выходных реле 54, 55 и 56 управления.
Поскольку реле памяти узла 53 памяти включены мажоритарно, то при срабатывании большинства из них, например двух из трех, образуется цепь возбуждения фазочувствительного реле
управления данной группы, например первой о Последнее же в соответствии с фазой сигнала срабатывает, замыкая цепь управления приводов 45 вращения устройств 2 крепления корпуса реак- тора, электромагнитов 27, электроприводов с редукторами 31, опор 5 устройства 1 установки корпуса реактора одного из нескольких функциональных блоков. При замыкании цепи управления привода 45 вращения опорное кольцо 4 устройства 1 установки корпуса реактора освобождается от башмаков 37 посредством винтов 40 устройства крепления корпуса реакто- pa. Одновременно цепью управления электромагнитами 27 стержни 25 выводятся из зацепления с дисками 22 фиксаторов 20, а цепью управления электроприводов с редукторами 31 приводят ся во вращение заданного направления силовые винты 12 опор 5, меняя расстояние между осями цилиндров 32, обеспечивают поворот кулачков 6 отно сит.ельно точки касания на наружных поверхностях 9 по окружности, при этом происходит подъем или спускание корпуса реактора 35 до тех пор, по ка не произойдет выравнивание корпуса реактора. При этом величина сигнала разбаланса упомянутого измерительног моста, образованного реохордом регулирования, нагрузочными сопротивлениями и задатчиком регулирования, окажется меньше тока срабатывания реле, и оно, обесточившись, своим контактом подключит переключатель к релейному коммутатору 50. После этого по команде персонала (вручную) или внешнего командного устройства замыкаются цепи на отключение электроприводов с редукторами 31 и отключение электромагнитов 27, в результате чего стержни 25 пружинами 26 вводятся в зацепление с дисками 22 фиксаторов опор 5 устройства установки корпуса реактора, а цепь управления включает приводы 45 вращения и обеспечивает вращение винтов 40 в обратном направлении, при этом башмаки 38 устройства крепления корпуса реактора прижимаются к опорному кольцу 4. Отключение приводов 45 вращения обеспечивается превьшением крутящего момента на валу вьщ1е допустимого.
Б случае незамыкания любой цепи управления одного из приводов 45 вращения устройства 2 крепления корпуса реактора, электромагнита 27, электропривода с редуктором 31 опоры 5 устройства 1 установки корпуса реактора любого функционального блока подается сигнал на срабатывание соответствующей аварийной защиты на останов блока.

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для электроклепки секций пластинчатого конвейера | 1980 |
|
SU902972A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268401C2 |
| Устройство для установки и закрепления изделий на фундаменте | 1981 |
|
SU1044881A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| КОНСТРУКЦИЯ КАБИНЫ РАЗМЕЩЕНИЯ ПАССАЖИРОВ, ЭКИПАЖА, ОБОРУДОВАНИЯ | 2006 |
|
RU2327607C2 |
| УСТРОЙСТВО ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ С ЭЛЕКТРОПРИВОДОМ РЕГУЛИРУЮЩИХ КЛАПАНОВ ПРИ УСТАНОВКЕ НА МЕХАНИЗМ КОРОМЫСЛЕННОГО ТИПА | 2013 |
|
RU2533256C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| ГОРИЗОНТАЛЬНАЯ МНОГОСТУПЕНЧАТАЯ СЕКЦИОННАЯ ЦЕНТРОБЕЖНАЯ НАСОСНАЯ УСТАНОВКА И СПОСОБ СБОРКИ НАСОСНОЙ УСТАНОВКИ | 2013 |
|
RU2529979C1 |

Фиг1
«
М
П
К
В 5
7
(риг. 3
21
. .: . - oV- . ОЧР ... . / о. Г)-; -i-:.. . .0: .. . 0.
фиг Л
49
//////
8
фиг.7
фт.В
Составитель А. Колпаков Редактор М. Келемеш Техред В.Кадар Корректорм. Демчик
Заказ 1292/37 Тираж 640Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент ФРГ № 1904463, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ТОПЛИВНЫЙ ПАРОГЕНЕРАТОР | 2006 |
|
RU2349788C2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
