,-
1130
Изобретение относится к судовой контрольно-измерительной технике и может быть использовано для управления грузовыми операциями и для контроля массы груза и его распределения в трюме в процессе технической эксплуатации корпуса.
Цель изобретения - улучшение контроля распределения и смещения груза в трюме и повышение точности опреде ления его массы.
Значение этих характеристик груза необходимо для расчетов напряженного состояния корпуса судна и его конструкций и обеспечения безопасности мо реплаваиия, особенно при перевозке тяжелых грузов, которые не в полном объеме занимают трюм и могут смещаться при качке.
На фиг. 1 представлена блок-схема системы; на фиг. 2 - схема расположения первичных преобразователей (в увеличенном масштабе) на связях второго дна; на фиг. 3 - структурная схема блока управ ения, коммутатора, сумматора и их связи между собой и другими блоками системы; на фиг. 4 - логическая схема блока идентификации выходных сигналов; на фиг. 5 - приме выполнения схемы задержки блока управления; на фиг. 6 - пример выполнения блока представления данных.
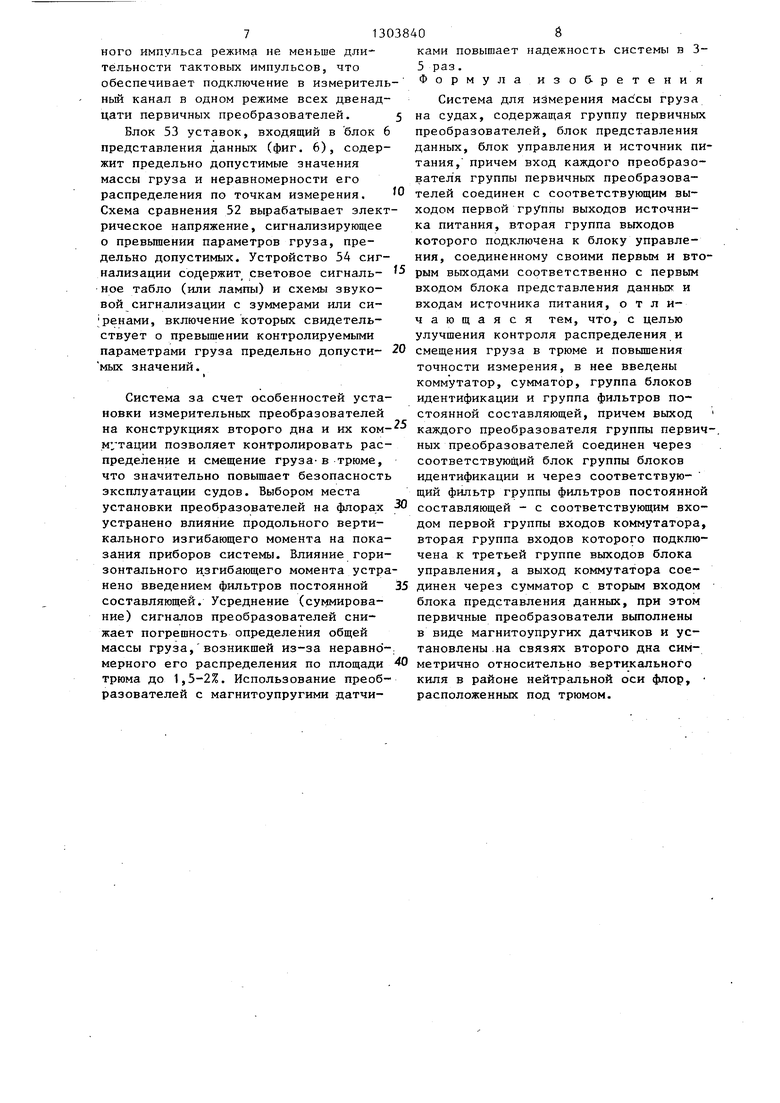
Система (фиг. 1) содержит группу первичных преобразователей 1, группу блоков 2 идентификации, группу фильтров 3 постоянной составляющей, коммутатор 4, сумматор 5, блок 6 представления данных, блок 7 управления и источник 8 питания. Блок управле- НИН (фиг. 3) содержит генератор 9 тактовых импульсов, схему 10 задержки, генератор 11 импульсов режима, распределитель 12 тактовых импульсов и распределитель 13 импульсов режима Коммутатор (фиг. 3) содержит групповые ключи 14 - 16 и ключи 17 - 40, а сумматор (фиг. 3) содержит схему 41 суммирования. Блок идентификации (фиг. 4) содержит демодулятор 42, состоящий из предварительного усилителя 43 и выпрямителя 44, схему операционного усилителя 45 и потенцио- ,метры 46 и 47. Схема задержки (фиг.5) содержит пересчетное устройство 48, дифференцирующую цепь 49 и ждущий мультивибратор 50. Блок представления данных (фиг. 6) содержит устройство измерения, регистрации и распре
4
с 0 5
0
5
О2
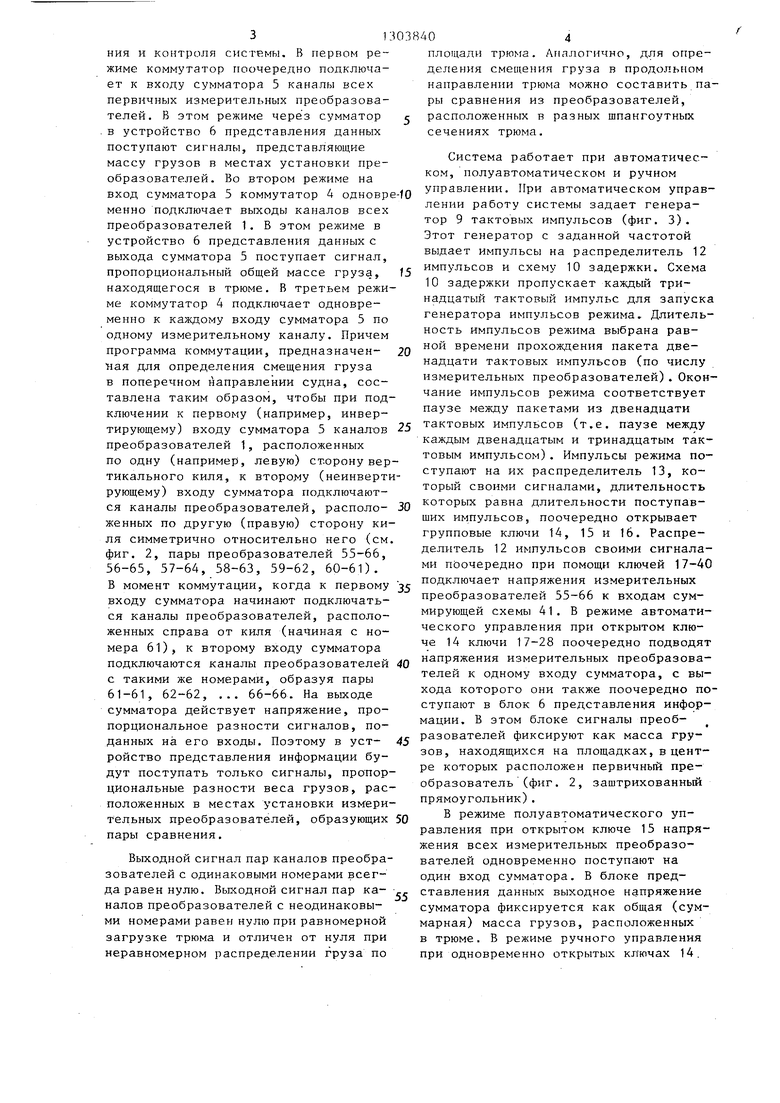
деления массы груза 51, схему 52 сравнения, блок 53 установок и устройство 54 сигнализации. На фиг. 2 представлен пример расположения двенадцати первичных преобразователей 55 - 66 в районе нейтральной оси флор 67, проходящих под трюмом с грузом 68. Преобразователи установлены между днищевыми стрингерами 69 симметрично относительно вертикального киля 70.
Вход каждого преобразователя группы первичных преобразователей 1 соединен с соответствующим выходом первой группы выходов источника 8 питания, вторая группа выходов которого подключена к блоку 7 управления, соединенному своими первым и вторым выходами, соответственно, с первым входом блока 6 представления данньк и входом источника 8 питания. Выход каждого преобразователя группы первичных преобразователей 1 соединен- через соответствующий блок группы блоков 2 идентификации и через соответствующий фильтр группы фильтров 3 постоянной составляющей с соответст- вующим входом группы входов коммутатора 4, вторая группа входов которого подключена к третьей группе выходов блока 7 управления. Выход коммутатора 4 соединен через сумматор 5 с вторым входом блока 6 представления данных.
Система работает следующим образом,
Переключателем блока 7 управления подключают источник 8 питания к входам возбуждения первичных преобразователей 1. С помощью регулировочных элементов блока 2 идентификации добиваются совпадения выходных характеристик первичных преобразователей 1. После идентификации напряжение несущей частоты, огибающая которого представляет собой сумму полезного сигнала и сигнала помехи, поступает на вход демодулятора блока 2, С выхода демодулятора напряжение, соответствующее огибающей, поступает на вход фильтра постоянной составляющей 3. Фильтр пропускает на вход коммутатора 4 только постоянную составляющую, пропорциональную измеряемой массе груза. Переменное напряжение помехи, вызванное волновым изгибающим моментом, отфильтровывается. Коммутатор 4, который работает по сигналам блока 7 управления, задает три режима измерения и контроля СИСТЕМЫ, в перЕюм режиме коммутатор поочередно подключает к входу сумматора 5 каналы всех первичных измерительных преобразователей. В этом режиме через сумматор .в устройство 6 представления данных поступают сигналы, представляющие массу грузов в местах установки преобразователей. Во втором режиме на вход сумматора 5 коммутатор 4 одновре менно подключает выходы каналов всех преобразователей 1. В этом режиме в устройство 6 представления данных с выхода сумматора 5 поступает сигнал, пропорциональный общей массе груза, находящегося в трюме. В третьем режиме коммутатор 4 подключает одновременно к каждому входу сумматора 5 по одному измерительному каналу. Причем программа коммутации, предназначен- ная для определения смещения груза в поперечном направлении судна, составлена таким образом, чтобы при подключении к первому (например, инвертирующему) входу сумматора 5 каналов преобразователей 1, расположенных по одну (например, левую) сторону вертикального киля, к второму (неинвертирующему) входу сумматора подключаются каналы преобразователей, располо- женных по другую (правую) сторону киля симметрично относительно него (см фиг. 2, пары преобразователей 55-66, 56-65, 57-64, 58-63, 59-62, 60-61). В момент коммутации, когда к первому входу сумматора начинают подключаться каналы преобразователей, расположенных справа от киля (начиная с номера 61), к второму входу сумматора подключаются каналы преобразователей с такими же номерами, образуя пары 61-61, 62-62, ... 66-66. На выходе сумматора действует напряжение, пропорциональное разности сигналов, поданных на его входы. Поэтому в уст- ройство представления информации будут поступать только сигналы, пропорциональные разности веса грузов, расположенных в местах установки измерительных преобразователей, образующих пары сравнения.
Выходной сигнал пар каналов преобразователей с одинаковыми номерами всегда равен нулю. Выходной сигнал пар каналов преобразователей с неодинаковыми номерами равен нулю при равномерной загрузке трюма и отличен от нуля при неравномерном распределении груза по
O 5 0 5 05 0 5 0
5
площади трюма. Аналогично, для определения смещения груза в продольном направлении трюма можно составить пары сравнения из преобразователей, расположенных в разных щпангоутных сечениях трюма.
Система работает при автоматическом, полуавтоматическом и ручном управлении. При автоматическом управлении работу системы задает генератор 9 тактовых импульсов (фиг. 3). Этот генератор с заданной частотой выдает импульсы на распределитель 12 импульсов и схему 10 задержки. Схема 10 задержки пропускает каждьй тринадцатый тактовый импульс для запуска генератора импульсов режима. Длительность импульсов режима выбрана равной времени прохождения пакета двенадцати тактовых импульсов (по числу измерительных преобразователей). Окончание импульсов режима соответствует паузе между пакетами из двенадцати тактовых импульсов (т.е. паузе между каждым двенадцатым и тринадцатым тактовым импульсом). Импульсы режима поступают на их распределитель 13, который своими сигналами, длительность которых равна длительности поступавших импульсов, поочередно открывает групповые ключи 14, 15 и 16. Распределитель 12 импульсов своими сигналами поочередно при помощи ключей 17-40 подключает напряжения измерительных преобразователей 55-66 к входам суммирующей схемы 41. В режиме автоматического управления при открытом ключе 14 ключи 17-28 поочередно подводят напряжения измерительных преобразователей к одному входу сумматора, с выхода которого они также поочередно поступают в блок 6 представления инфсэр- мации. В этом блоке сигналы преобразователей фиксируют как масса грузов, находящихся на площадках, в центре которых расположен первичный преобразователь (фиг. 2, заштрихованный прямоугольник).
В режиме полуавтоматического управления при открытом ключе 15 напряжения всех измерительных преобразователей одновременно поступают на один вход сумматора. В блоке представления данных выходное напряжение сумматора фиксируется как общая (суммарная) масса грузов, расположенных в трюме. В режиме ручного управления при одновременно открытых ключах 14.
и 16 пары ключей 17 и 40, 18 и 39, 28 и 29 поочередно подключают напряжения соответствующих им пар измерительных преобразователей 55 и 66, 56 и 65, ,,, 61 и 61, ... 66 и 66 к инвертирующему и неинвертирующему входам сумматора 5. В блоке 6 выходные напряжения сумматора 5 фиксируются как разности массы грузов, находящихся на площадках, соответствующих подключаемым парам измерительных преобразователей. При полуавтоматическом управлении распределитель импульсов режима 13 отключают преобразователем блока управления, а ключи 14 - 16 открываются напряжением источника 8 питания нажатием кнопок включения блока 7 управления.
При-ручном управлении, кроме распределителя импульсов режима 13, переключателем отключают распределитель тактовых импульсов 12, а ключи 17 - 40 открываются кнопочными включателями, подающими напряжение источниками питания на эти ключи.
Первичные измерительные преобразователи 1 системы установлены на связях второго дна симметрично относи- .тельно вертикального киля в районе нейтральной оси флор, расположенных под трюмом. За счет поперечного расположения флор в системе набора судна, на их напряженное состояние не влияют изменения продольного верти-- кального изгибающего момента, связанные с изменением массы грузов в других трюмах судна. Напряженное состояние флор подтвержено влиянию горизонтального изгибающего момента, возникающего при плавании судна на нерегулярном волнен ии и при ходе вразрез волне и изменяющегося с частотой, зависящей от периодичности волнения. Сигналы измерительных преобразователей при горизонтальном изгибающем моменте имеют характер напряжения, изменяющегося с частотой до 10 Гц. Для устранения этой помехи в систему дополнительно введены фильтры 3 постоянной составляющей, величина, которой
пропорциональна массе груза.
В районе нейтральной оси флоры близки к нулю нормальные напряжения, связанные с изгибающим моментом, и максимальны касательные напряжения, зависящие от массы груза, расположенного под измеряемым участком флоры. Место установки измерительного преобразователя на судне определяет координаты (абсциссы) центра тяжести груза, размещенного на данной измерительной площадке трюма. В блоке представления данных координата груза определяется по номеру измерительного преобразователя. Координаты груза используют при определении изгибающего момента от сил дедвейта.
Магнитоупругие преобразователи системы характеризуются высокой надежностью в судовых условиях эксплуатации и возможностью конструктивной привязки к судовым конструкциям. Маг- нитоупругий эффект в сталях корпусных конструкций выражен достаточно сильно. Это позволяет выполнить преобразователи ка.к приставные, с использованием измеряемого участка конструкции в качестве магнитопровода преобразователи.
Схема 45 блока идентификаций 2 (фиг. 4), позволяет регулировать масштабный коэффициент и начальный сигнал усилителя 43. Для этого в цепь обратной связи параллельно выходу усилителя 43 включен потенциометр 46, изменением положения движка которого добиваются равенства масштабных коэффициентов каналов преобразователей 1. Начальный сигнал на выходе усилителя 43 регулируют изменением положения движка потенциометра 47, на который подано постоянное напряжение. При
отсутствии измеряемой нагрузки, когда на,вход усилителя поступает нулевой сигнал преобразователя, регулируя потенциометр 47, добиваются отсутствия начального сигнала на выходе блока идентификации.
На вход пересчетного устройства 48 блока 7 управления (фиг. 3) поступают тактовые импульсы от генератора 9,
а с выхода мультивибратора на генератор 11 импульсов режима поступают импульсы, частота следования которых в двенадцать раз меньше частоты тактовых импульсов генератора 9. Распределитель 12 блока 7 управления имеет двенадцать выходов, а распределитель 13 - три выхода. На своих выходах распределитель 12 поочередно вьщает двенадцать импульсов, управляющих работой ключей 17-40 (фиг. 3). Распределитель 13 также поочередно на своих выходах выдает три импульса режима., управляющих работой трех групповых Сдачей 14 - 16. Длительность одного импульса режима не меньше длительности тактовых импульсов, что обеспечивает подключение в измеритель- ный канал в одном режиме всех двенадцати первичных преобразователей. з
Блок 53 уставок, входящий в блок 6 представления данных (фиг. 6), содержит предельно допустимые значения массы груза и неравномерности его
распределения по точкам измерения,
Схема сравнения 52 вырабатывает электрическое напряжение, сигнализирующее о превышении параметров груза, предельно допустимых. Устройство 54 сигнализации содержит световое сигналь- ное табло (или лампы) и схемы звуковой сигнализации с зуммерами или си- ;ренами, включение которых свидетельствует о превышении контролируемыми параметрами груза предельно допусти- мых значений.
.Система за счет особенностей установки измерительных преобразователей на конструкциях второго дна и их ком мутации позволяет контролировать распределение и смещение груза-в трюме, что значительно повышает безопасность эксплуатации судов. Выбором места установки преобразователей на флорах устранено влияние продольного вертикального изгибающего момента на показания приборов системы. Влияние горизонтального и.згибающего момента устранено введением фильтров постоянной составляющей. Усреднение (суммирование) сигналов преобразователей снижает погрешность определения общей массы груза, возникшей из-за неравномерного его распределения по площади трюма до 1,5-2%. Использование преобразователей с магнитоупругими датчи- з
JO
20
25
- 35, 40 ками повышает надежность системы в 35 раз.
Формула изобретения
Система для измерения мас сы груза на судах, содержащая группу первичных преобразователей, блок представления данных, блок управления и источник питания, причем вход каждого преобразователя группы первичных преобразователей соединен с соответствующим выходом первой группы выходов источника питания, вторая группа выходов которого подключена к блоку управления, соединенному своими первым и вторым выходами соответственно с первым входом блока представления данных и входам источника питания, о т л и- чающаяся тем, что, с целью улучшения контроля распределения и смещения груза в трюме и повышения точности измерения, в нее введены коммутатор, сумматор, группа блоков идентификации и группа фильтров постоянной составляющей, причем выход каждого преобразователя группы первичных преобразователей соединен через соответствующий блок группы блоков идентификации и через соответствующий фильтр группы фильтров постоянной составляющей - с соответствующим входом первой группы входов коммутатора, вторая группа входов которого подключена к третьей группе выходов блока управления, а выход коммутатора соединен через сумматор с вторым входом блока представления данных, при этом первичные преобразователи выполнены в виде магнитоупругих датчиков и установлены .на связях второго дна симметрично относительно вертикального киля в районе нейтральной оси флор, расположенных под трюмом.
61
67 Ы
69

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная телеизмерительная система | 1990 |
|
SU1783562A1 |
| Устройство для вычисления показателя экспоненциальной функции | 1985 |
|
SU1270770A1 |
| Устройство для цетрализованного контроля | 1976 |
|
SU661515A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАДИОТЕЛЕМЕТРИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2126139C1 |
| Устройство для вычисления показателя экспоненциальной функции | 1986 |
|
SU1335990A1 |
| Автономный каротажный цифровой прибор | 1987 |
|
SU1452948A1 |
| Многоканальное устройство контроля температурных режимов инкубаторов | 1983 |
|
SU1157528A1 |
| Устройство контроля и регистрации параметров химических источников тока | 1977 |
|
SU731501A1 |
| Кодек для передачи информации с помощью имитостойких последовательностей сигналов сложной формы | 1987 |
|
SU1451719A1 |
| Статический преобразователь с устройством для его управления | 1986 |
|
SU1403215A1 |

Изобретение относится к судовой контрольно-измерительной технике и может быть использовано для управления грузовыми операциями и в системах контроля прочности и устойчивости морских судов. Цель изобретения - улучшение контроля распределения и смещения груза в трюме и повышение точности определения его массы. Для этого преобразователи 1 установлены J на связях второго дна симметрично относительно вертикального поля в районе нейтральной оси флор, расположенных под трюмом. Это позволяет определить массу по различным площадкам трюма. С помощью блока 2 идентификации, к которому подключены выходы преобразователей 1, добиваются одинаковой чувствительности и устранения начальных сигналов всех преобразователей 1. Фильтром 3 постоянной составляющей устраняют влияние волновой помехи. Включенные последовательно коммутатор 4 и сумматор 5, обрабатывая сигналы преобразователя 1 по специальной программе блока 7 управления, позволяют в блоке 6 представления данных получать картину распределения груза и контролировать его смещения. 6 ил. с (О (Л 00 о (jO 00 4 О
70
Фиг.
(DUz.J
Omi
фиг A
/r//
От 7
| Устройство для взвешивания подвижных объектов | 1975 |
|
SU531039A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кичкин И.И | |||
| Датчики судовых систем дистанционного контроля | |||
| М.: Транспорт, 1964, с | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ПРОХОДЯЩЕГО ПАРА В ТРУБАХ И НАГРУЗОК ПАРОВЫХ КОТЛОВ | 1921 |
|
SU595A1 |
