11303995
Изобретение относится к автоматике и вычислительной технике и может быть применено при построении систем программного управления приборами, приводимыми в действие электроприводом пе- f ременного тока.
Цель изобретения - сокращение занятости процессора программирующего блока при сохранении быстродействия.
В ЭВМ 1 записана программа, содержа щая координаты точек графика и алгоритм управления, аналоговьш двухкоор- динатнь1м самописцем 2 при построении этого графика. По сигналу готовности поступающему с выхрда элемента ЗИ 16 на интерфейс ЭВМ 1, последняя выдает значение координат X и Y точки графика и сигналы управления, которые посУправляющий сигнал И, (фиг,6 и 7) с
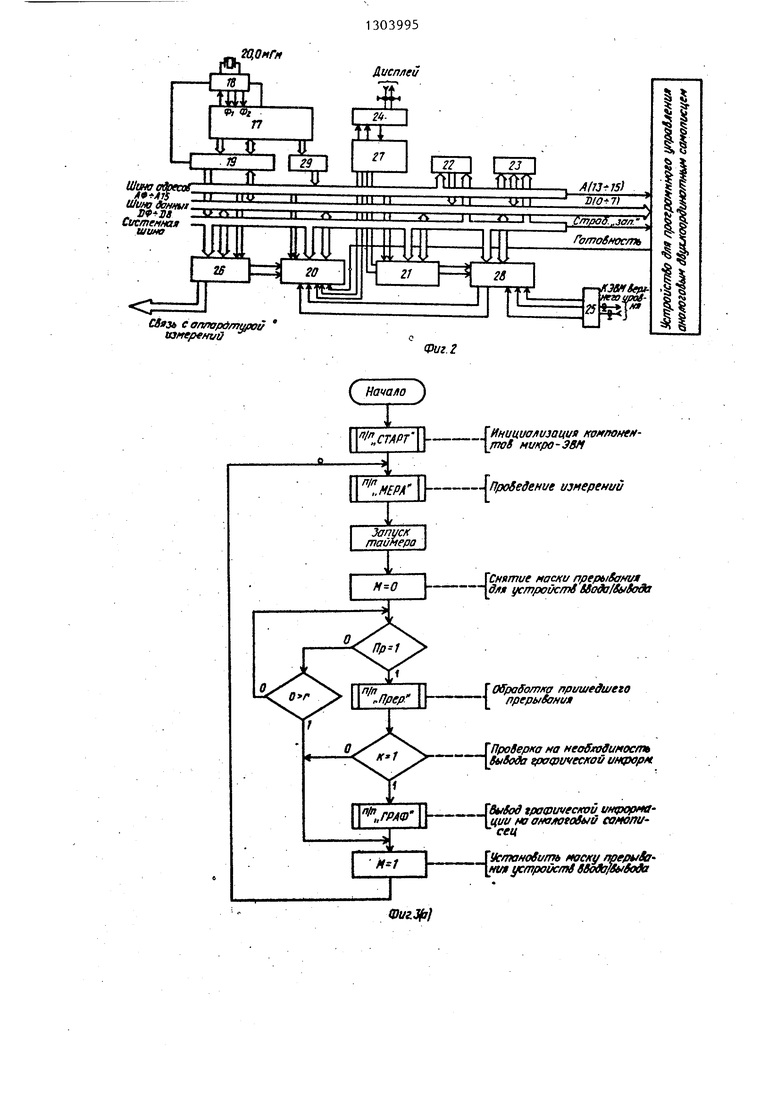
На фиг,1 приведена структурная схе- О тупают на входы дешифратора 3 команд ма устройства для программного управления аналоговым двухкоординатным са- моцисцем; на фиг.2 - функциональная схема ЭВМ; на фиг,За,б - алгоритм
выхода дешифратора записывает цифровые данные, поступающие с ЭВМ 1 в регистры 4 и 5 величины перемещения пера боты 3BMj нв фиг,4 - схема аналого- ра координат X и Y соответственно,
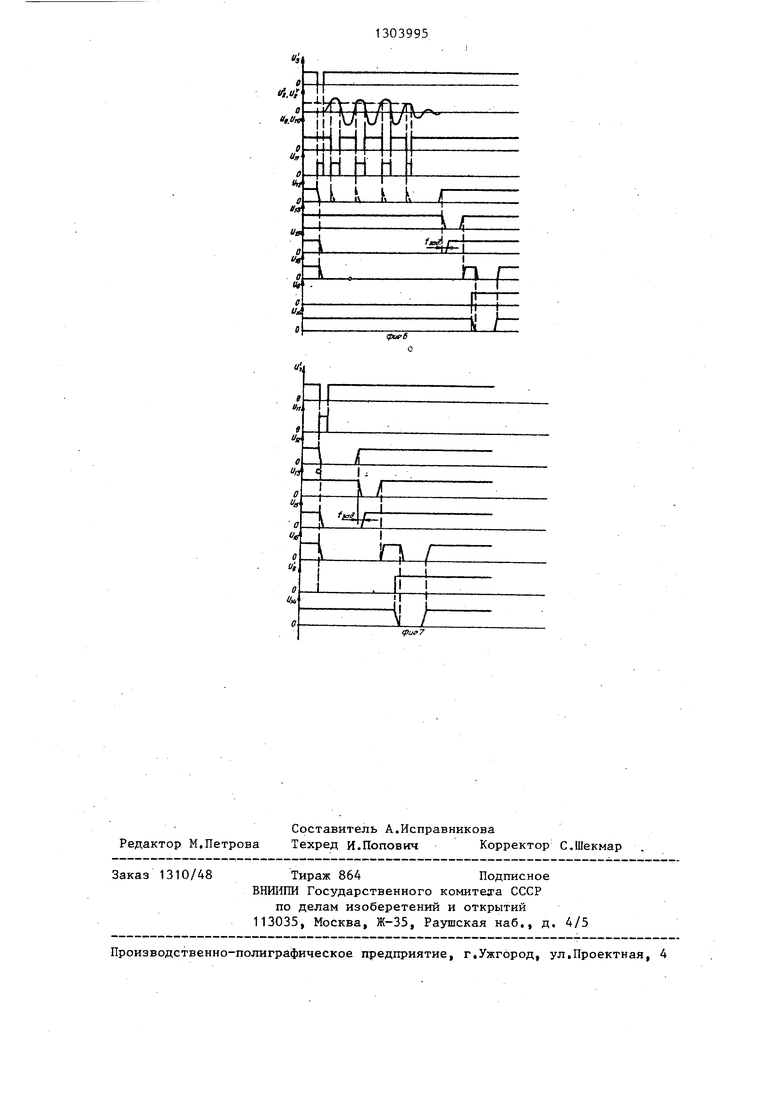
вого двухкоординатного самописца; на фиг.5 - узел управления; на фиг,6 - временные, диаграммы работы устройства при больших перемещениях пера аналогового двухкоординатного самописца; на фиг.7 - то же, при малых перемещениях пера аналогового двухкоординатного самописца,
Устройство содержит ЭВМ 1, аналого25
поступает на. третий вход элемента ЗИ-НЕ 11, выход которого соединен с входом одновибратора 12 с повторным запуском, служащим для отработки паузы, необходимой для небольшого перемещения пера, А переход сигнала управления и J из единицы в ноль запускает одновибратор 12, формируя на его выходе инверсный сигнал U , который
вый двухкоординатный самописец 2, дешифратор 3 команд, регистры 4 и 5 ве личины перемещения соответственно по X и Y координатам, цифро-аналоговые преобразователи 6 и 7 соответственно
по X и Y координатам, узел 8 управ- - элементом) служит для временной за- ления, первый 9 и, второй 10 формирова- j держки сигнала готовности, необходит тели импульсов, элемент ЗИ-НЕ 11, пер- мой для успокоения механической сис- вый одноБИбратор 12с повторным запуском, второй одновибратор 13, третий одновибратор 14, элемент 15 задержки, элемент ЗИ 16,
Программирующий блок 1 содержит центральный процессор 17, генератор 18, системный контроллер 19, контроллер 20 прерьшаний, интервальный тай- 0 версного импульса. Появление на входах
элемента ЗИ 16 инверсных импульсов и ,3 и формирует на выходе элемен- лельный интерфейс 26, интерфейсы 27 та ЗИ 16 инверсный импульс дли- и 28 последовательного обмена, шин- тельностью равный сумме длительнос- ный формирователь 29, ти импульсов одновибраторов 12 и 13,
Аналоговый двухкоординатньш самопи- Появление на выходе элемента 16 логи- сец 2 содержит делители 30 и 31 нап- ческого нуля U., сигнализирует о неготовности устройства. При больших перемещениях (отрабатываемых механипоступает на вход одновибратора 13 и на первый вход элемента ЗИ 16 через элемент 15 задержки,
Одновибратор 13 ( с регулирующим
темы самописца и для восстановления одновибратора 12, Элемент ЗИ 16 дает 35 задержку заднего фронта импульса U, ( дд /АО мс), сформированного одно- вибратором 12, необходимую для срабатывания одновибратора 13 и появления на втором входе; элемента ЗИ 16 инмер 21, запоминающие устройства 22 и 23, приемопередатчики 24 и 25, паралряжения, RC-фильтры 32 и 33, реохорды 34 и 35, источники 36 и 37 стабилизированного питания, усилители 38 и 39, -50 кой самописца за время t 20 мс) в трансформаторы 40 и 41, реверсивные цепи жесткой обратной связи усилителей переменного тока самописца коордидвигатели 42 и 43, электромагнит 44 и диод 45,
Узел 8 управления содержит RS-тригнат X и Y соответственно появляются переменные напряжения U, При
нат X и Y соответственно появляются переменные напряжения U, При
гер 46, транзистор 47 и резистор 48 55 поступлении их в формирователи 9 и ЭВМ- 1 используется в качестве прог- 10 импульсов они преобразуются в синраммирутощего блока«хронизирующие импульсы U q и U,, с
Устройство работает следующим об- f 50 Гц, т,е, переменное напряжеразом,ние обратной связи выступает в качесВ ЭВМ 1 записана программа, содержа щая координаты точек графика и алгоритм управления, аналоговьш двухкоор- динатнь1м самописцем 2 при построении этого графика. По сигналу готовности, поступающему с выхрда элемента ЗИ 16 на интерфейс ЭВМ 1, последняя выдает значение координат X и Y точки графика и сигналы управления, которые поступают на входы дешифратора 3 команд
Управляющий сигнал И, (фиг,6 и 7) с
тупают на входы дешифратора 3 команд
выхода дешифратора записывает цифровые данные, поступающие с ЭВМ 1 в регистры 4 и 5 величины перемещения пера координат X и Y соответственно,
0
5
поступает на. третий вход элемента ЗИ-НЕ 11, выход которого соединен с входом одновибратора 12 с повторным запуском, служащим для отработки паузы, необходимой для небольшого перемещения пера, А переход сигнала управления и J из единицы в ноль запускает одновибратор 12, формируя на его выходе инверсный сигнал U , который
поступает на вход одновибратора 13 и на первый вход элемента ЗИ 16 через элемент 15 задержки,
Одновибратор 13 ( с регулирующим
- элементом) служит для временной за- j держки сигнала готовности, необходит мой для успокоения механической сис-
0 версного импульса. Появление на входа
темы самописца и для восстановления одновибратора 12, Элемент ЗИ 16 дает 35 задержку заднего фронта импульса U, ( дд /АО мс), сформированного одно- вибратором 12, необходимую для срабатывания одновибратора 13 и появления на втором входе; элемента ЗИ 16 иннат X и Y соответственно появляются переменные напряжения U, При
поступлении их в формирователи 9 и 10 импульсов они преобразуются в син
тве генератора синхронизирующей тактовой серии. Импульсы поступают на первьш и второй входы элемента ЗИ-НЕ 11, выход которого подключен к одно- вибратору 12 с повторным запуском, и осуществляют его последующие запуски На выходе его формируется инверсный сигнал , передний фронт которого зависит от звукозапускающего управляющего сигнала U, пришедшего с дешиф- ратора, а задний фронт - от последнего пришедшего сигнала синхронизирующих импульсов Ug и и , Длительность
7 to
импульсов на выходе одновибратора 12 равна
и. -f- + t,
где t - длительность импульса в
режиме повторного запуска; t - длительность импульса в режиме запуска (t 25 мс);
t j t +t2+t +t - сумма времени
между первым и последним запусками.
Следовательно при малых перемещениях пера аналогового двухкоординат- ного самописца по координатам X и Y устройство отрабатывает временную паузу длительностью работы элементов 12 и 13 (около 40 мс), при больших перемещениях начинает принимать участие в формировании сигнала неготовности обратная связь с усилителей аналогового двухкоординатного самописца.
По сигналу готовности, вырабатываемому элементом ЗИ 16 после перемещения пера в заданную точку, ЭВМ 1
выдается следующее значение коррди
нат X и Y точки графика.
Одновибратор 14 (с регулирующим элементом) формирует временную задержку и , , необходимую для подъема (спуска).пера. Запуск одновибратора 14 осуществляется по управляющему сигналу Ug, поступающему с узла 8 управления .
В основу работы аналогового двухкоординатного самописца 2 положен компенсационный метод.
Напряжение постоянного тока подается на входные делители 30 и 31 напряжения. Затем напряжение фильтруется R(f-фшIьтpaми 32 и 33, сравнивается с компенсирующим напряжением, снимае- мым с реохордов 34 и 35, которые подключены к источникам 36 и 37 стабилизированного питания. Разности поданны
с O
5
0
с
0
0
е
0
и компенсирующих напряжений еИ поступают на входы усилителей 38 и 39, где они преобразуются в напряжение с частотой 50 Гц (с помощью вибропреобразователя) и усиливаются, после чего подаются через разделительные трансформаторы 40 и 41 на управляющие обмотки реверсивных двига-телей 42 и 43. Двигатели перемещают движки реохордов до тех пор, пока поданные напряжения не будут скомпенсированы напряжениями с реохордов. С движками реохордов связано пишущее устройство (перо), управляемое электромагнитом 44, которое вычерчивают на бумаге зависимость двух величин в прямоугольной системе координат.
С третьих обмоток трансформаторов 40 и 41 вводятся в усилители 38 и 39 напряжения жесткой отрицательной обратной связи уровнем до 12В, которые увеличивают стабильность коэффициентов усиления и снижают выходное сопротивление усилителей.
Когда происходит управление двигателями 42 и 43, в цепи обратной связи наводится синусоидальное переменное напряжение, пропадйемое после обработки двигателями 42 и 43 перемещения движков реохордов 34 и 35. Т,е-., когда осуществляется движение пера, с этих обмоток снимается сигнал, сообщающий об этом перемещении.
Узел 8 управления представляет со- бой RS-триггер с мощным транзистором (фиг.4).
Сигнал узла 8 управления управляет электромагнитом 44, втягивающим перо, RS-триггер запоминает состояние пера (поднято-опущено) по управляющим сигналам с дешифратора 3 команд.
Сигна л поднять - опустить перо подается с ЭВМ 1 по программе. Так, например, исполнение графика возможно в непрерывном режиме (перо опущено), в точечном режиме (перо поднято - опущено - поднято). Также возможно оформление графиков и чертежей (написание цифр, букв, осей координат).
Работа устройства при малых перемещениях отличается от работы устройства при больших перемещениях тем, что самописцем не вырабатывается синусоидальный сигнал обратной связи (из-за быстрой отработки перемещения), в результате чего в формирователях 9 и 10 не появляются синхронизирующие
импульсы и не происходит перезапуска одновибратора 12 с повторньш запуском
Временная диаграмма работы устройства при больших перемещениях пера представлена на фиг,5.
Работа .устройства при малых перемещениях представлена на фиг.6.
Сигнал и 3 с дешифратора 3 поступает на первый вход элемента ЗИ-НЕ 11,
13039956
тель, выход которого соединен с соответствующим входом управления .аналогового двухкоординатного самописца, у которого вход управления пером подключен к управляющему выходу узла управления, ко входам которого подключены первый и второй выходы дещифра- тора команд, соединенного входами с адресной шиной и шиной системного
Переход из 1 в О сигнала дешифра-fO управления ЭВМ, к шине данных кототора инвертируется в элементе 11 (в переход из О в 1) и является запускающим для одновибратора.
Сигналы синхросерий с формирователей 9 и 10 поступают на второй и третий входы элемента ЗИ-НЕ 11„ выход которого связан с одновибратором 12 с повторным перезапуском. Переход из 1 в О последнего импульса синхросерий перезапускает одновибратор 12 последний раз ,
Серия импульсов является синхронизирующей, так как синхронизирует работу аналогового двухкоординатного самописца с устройством программного управления, так как в это время го- . товность на прием следующей величины перемещения снимается,
В качестве одновибратора 12 с повторным запуском можно применять микросхему типа К155АГЗ,Применение устройства для программного управления аналоговым двухкоор- динатным самописцем, имеющим асинхрон ные двигатели привода, обеспечивает передачу из ЭВМ информации и в графическом виде с максимальным быстродействием, гибко изменяя время неготовности устройства в зависимости от величины перемещения. Кроме того, сок- paщaetcя время занятости ЭВМ путем непрерывного слежения устройством за процессом отработки перемещения пера по координатам X и Y, и готовность, поступающая из устройства, дает дей
ствительное значение об отработке пером перемещения,
Формула изобретения
1, Устройство для программного управления аналоговым двухкоординатным самописцем, содержащее ЭВМ, дешифра- .тор команд, узел управления и по каждой X и Y координате последовательно соединенные регистр величины перемещения и цифрсаналоговый преобразова0
5 0
0
рой подключены информационными входами регистры величины перемещения по X и Y координатам, управляющие входы которых соединены с третьим выходом
5 дешифратора команд, отличающееся тем, что, с целью сокращения занятости процессора ЭВМ при сохранении быстродействия, введены два формирователя импульсов, элемент ЗИ-НЕ, первый одновибратор с повторным запуском, второй одновибратор, элемент задержки, переменный резистор, элемент ЗИ, соединенный выходом с интерфейсом .ЭВМ, входы первого и
5 второго формирователей импульсов подключены соответственно к выходу обратной связи X и Y координат, аналоговые двухкоординатные самописцы, выходы формиро рателей импульсов соединены с первым и вторым входами элемента ЗИ-НЕ, третий вход которого подклю-. чен к третьему выходу дешифратора команд, выход элемента ЗИ-НЕ через первый одновибратор с повторным запуском соединен с первым входом второго одновибратора и через элемент задержки - с первым входом элемента ЗИ, второй вход которого подключен к выходу второго одновибратора, второй вход которого соединен с одним выводом первого переменного резистора, подключенного вторым выводом к общей шине устройства,
2, Устройство по п,1, отличающееся тем, что для формирования временной задержки для подъема и опускания пера аналогового двухкоординатного самописца в устройство введен третий одновибратор, первый
0 вход которого соединен с нулевым выходом узла управления, второй вход третьего одновибратора подключен к .первому выводу переменного резистора, второй вывод которого соединен с об5 щей шиной устройства, а выход третьего одновибратора подключен к третьему входу элемента ЗИ,
5
ЩОмГн
/,
Шина iowiur Сптемная UIUHO
еаптрдтшюо
V3MfpfHUU
Фиг. 2
С Нача/ioj
{Инициализация конгюнен- тоВ никра ЗВН
Про8едение измерений
Снятие ftacffi/ преры8анга |й« устройс/пй UoAj/ivto t
OffpaSomKa пришедшего прерывания
Проверка на HeoffjroffufKxmt ЛиЛ}Лг графической инфорг
ГвиЛя графической i/Hipopfta- 4iftf наамамеовыб сомот/
сец
Ус/гюно8угт ftacKU mfptfSff ния устройств eSoiOfetfSo t
(Dui3fii
фиг. 5
Редактор М.Петрова
Составитель А.Исправникова
Техред И.Попович Корректор С.Шекмар
Заказ 1310/48
Тираж 864Подписное
ВНИНПИ Государственного комитета СССР
по делам изоберетений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4


| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный толщиномер | 1985 |
|
SU1268943A1 |
| Устройство для определения координатной зависимости фотоЭДС светочувствительных элементов | 1986 |
|
SU1506401A1 |
| Устройство для считывания графической информации | 1990 |
|
SU1728872A1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Анализатор законов распределения | 1979 |
|
SU960845A1 |
| Многоканальная система измерения и регистрации | 1988 |
|
SU1707546A1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Устройство для формирования треков | 1988 |
|
SU1580401A1 |
| Устройство для считывания графи-чЕСКОй иНфОРМАции | 1979 |
|
SU811305A1 |
| Устройство для исседования зрительной системы | 1984 |
|
SU1209149A1 |

Изобретение относится к автоматике и вычислительной технике и может быть применено при построении систем программного управления приборами, приводимыми в действие электроприводом переменного тока. Изобретение позволяет уменьшить занятость процессора ЭВМ при одневременном сохранении быстродействия путем обеспечения режима непрерывного слежения устройством за процессом отработки перемещения пера самописца, задаваемого программирующим блоком. При малых перемещениях пера самописца по координатам X и У устройство отрабатывает временную паузу длительностью работы одно- вибраторов 12 и 13. При больших перемещениях начинает принимать участие в формировании неготовности обратная связь с усилителей переменного тока аналогового двухкоординатного самописца, формирующая в формирователях 9 и 10 синхронизирующие импульсы. Од- новибратор 14 формирует временную задержку, необходимую для подъема-опускания пера. 1 з.п. ф-лы. 7 ил. S (Л е О5 О СО СО Г СЛ фа./
| Добрынин В.А., Шикоряк И,А | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| - Прибс | |||
| ры и техника эксперимента, 1982, № 1, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Жуков А.А | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| - Прибо - ры и техника эксперимента, 1983, № 1, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
