Фиг.1
L.
xz
//
Изобретение относится к технике контроля фотоэлектрических и электрофизических параметров фоточувствительных приборов и ьюжет быть исполь- зовано для исследования распределения по поверхности электрофизических параметров полупроводников, ЦДЛ- структур, фотодиодов и т.д., а также контроля качества фоточувствительцых приборов, например, на основе фотодиодов и МДП-структур.
Цель изобретения - повышение точности измерения координатной зависимости фотоЭДС.
На фиг.1 представлена функциональная схема устройства; на фиг.2 - блок-схема программы измерения координатной зависимости фотоЭДС.
Устройство содержит двухкоординат- ный самописец 1, источник 2 модулированного света, размещенный на каретке самописца, плоскость перемещения которой ориентирована перпендикулярно оптической оси объектива 3, исследуемый светочувствительный элемент 4, усилитель 5, вход которого подключен к полевому электроду элемента 4, а выход - к входу детектора 6, блок 7 управления, выполненный в виде двух цифроаналоговых преобразователей (ЦАП) 8 и 9, аналого-цифровой преобразователь (АЦП) 10 микро ЭВМ 11, причем выход первого ЦАП 8 подключен к входу Y двухкоордииатно- го самописца 1, вход X которого подключен к выходу второго ЦАП 9, входы первого и второго ЦАП 8 и 9 через интерфейсную шину подключены к микро- ЭВМ 11, выход детектора 6 подключен к входу АЦП 10, выход которого через интерфейсную шину подключен к микро- ЭВМ,
Устройство работает следующим образом.
Блок 7 программно задает на входе Y двухкоординатного самописца 1 фиксированное напряжение смещения V , а на вход X подает дискретную последовательность линейно изменяющихся зна чений напряжения V(x;). При этом пятно сфокусированного излучения све тодиода перемещается по поверхности светочувствительного элемента 4. Сигнал V(X(), соответствующий точке на поверхности элемента с координатой (х-; 0), подается на вход усилителя 5, после усиления детектируется детектором 6 и запоминается в оператив0
5 0
5
0 5
ной памяти микроэвм 11, входящей в блок 7 управления. После сканирования производится подача на вход X самописца суммы линейно изменяющегося напряжения V(x;) и °/2, а на вход Y - суммы напряжений V°/2 и соответствующей последовательности V(.(x;). В эти моменты времени перо самописца опущено. После записи координатной зависимости сигнала в точках структуры с координатами ( 0) производятся изменение напряжения V на величину шага h и повторное сканирование, а затем запись координатной зависимости сигнала, соответствующей точкам,структуры с координатами (х.; h). Последовательное повторение операций -сканирования поверхности исследуемой структуры сфокусированным световым пучком и запись координатной зависимости сигнала фотоЭДС позволяют получить трехмерное изображение распределения фотоЭДС по поверхности структуры.
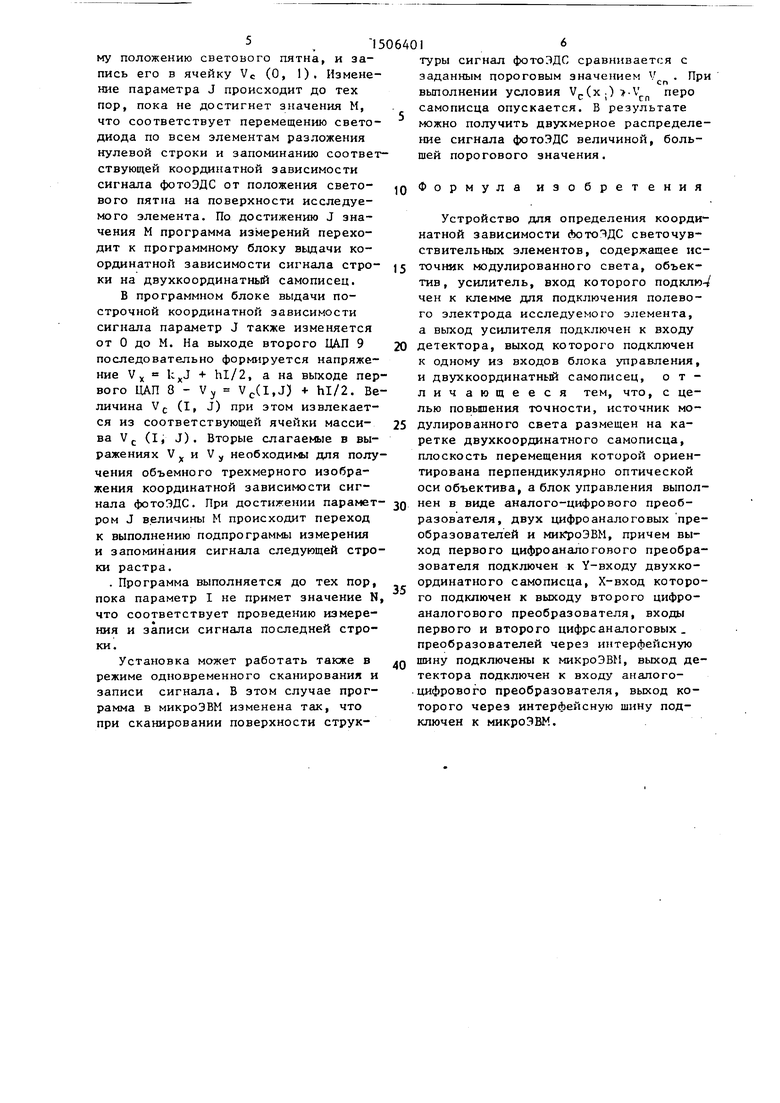
Программой (фиг.2) предусмотрено линейное сканирование сфокусированным пятхом с прдмоугольным растром поверхности светочувствительного элемента с числом элементов разложения в строке М и числом строк N.
Блок 7 управления построчной координатной зависимости сигнала работает следующим образом. Параметр I принимает численное значение О,что соответствует нулевой строке сканирования. На выходе первого ЦАП 8 (вход Y самописца) формируется напряжение V, Ы 0. Затем параметру J присваивается нулевое значение. На выходе второго ЦАП 9 (вход X самописца) формируется напряжение V О, что соответствует нулевому элементу разложения нулевой строки. Затем на управляющий вход АЦП подается управляющий сигнал от ЭВМ и производится преобразование сигнала фотоЭДС, соответствующего нулевому положению светового пятна, в цифровое значение, которое заносится в ячейку памяти ЭВМ (0,0) массива V. (I, J). После этого происходит циклическое изменение параметра J на единицу. На выходе второго ЦАП 9 формируется напряжение V kj. Источник 2 занимает положение, соответствующее первому элементу разложения нулевой строки. Происходит преобразование сигнала фотоЭДС, соответствующее этому положению светового пятна, и запись его в ячейку Vc (О, 1), Изменение параметра J происходит до тех пор, пока не достигнет значения М, что соответствует перемещению свето- диода по всем элементам разложения нулевой строки и запоминанию соответствующей координатной зависимости сигнала фотоЭДС от положения светового пятна на поверхности исследуемого элемента. По достижению J значения М программа измерений переходит к программному блоку выдачи координатной зависимости сигнала строки на двухкоординатный самописец. В программном блоке выдачи построчной координатной зависимости сигнала параметр J также изменяется от О до М. На выходе второго ЦАП 9 последовательно формируется напряжение V
U,J
+ hi/2, а на выходе первого ЦАП 8 - V;, Vc(I,J) + hI/2. Величина Vj. (I, J) при этом извлекается из соответствующей ячейки массива V (. (I, J). Вторые слагаемые в выражениях V JJ и V у необходимы для получения объемного трехмерного изображения координатной зависимости сигнала фотоЗДС. При достижении параметром J величины М происходит переход к выполнению подпрограммы измерения и запоминания сигнала следующей строки растра.
. Программа выполняется до тех пор, пока параметр I не примет значение N, что соответствует проведению измерения и записи сигнала последней строки.
Установка может работать также в режиме одновременного сканирования и записи сигнала. В этом случае программа в микроэвм изменена так, что при сканировании поверхности структуры сигнал фотоЗДС сравнивается с заданным пороговым значением V. При выполнении условия ;) Д . перо самописца опускается. В результате можно получить двухмерное распределение сигнала фотоЭДС величиной, большей порогового значения.
Формула изобретения
5
0
Устройство для определения координатной зависимости фотоЭДС светочувствительных элементов, содержащее источник модулированного света, объектив, усилитель, вход которого подклю-/ чен к клемме для подключения полевого электрода исследуемого элемента, а выход усилителя подключен к входу детектора, выход которого подключен к одному из входов блока управления, и двухкоординатньй самописец, о т - лич ающееся тем, что, с целью повышения точности, источник модулированного света размещен на каретке двухкоординатного самописца, плоскость перемещения которой ориентирована перпендикулярно оптической оси объектива, а блок управления выполнен в виде аналого-цифрового преобразователя, двух цифроаналоговых преобразователей и микгроЭВМ, причем выход первого цифроаналогового преобразователя подключен к Y-входу двухкоординатного самописца, Х-вход которого подключен к выходу второго цифро- аналогового преобразователя, входы первого и второго цифре аналоговых . преобразователей через интерфейсную шину подключены к микроЭВМ, выход детектора подключен к входу анапого- .цифрового преобразователя, выход которого через интерфейсную шину подключен к микроэвм.
5
0
5
0
о) программной , inoH измерения и. запоминания построчной координатной заКиси- цости сигнала
f программный f/iOH Выдачи построчной координатной зависимости сигнала. на дйухкоординагп tikiu самописец
Фиг.2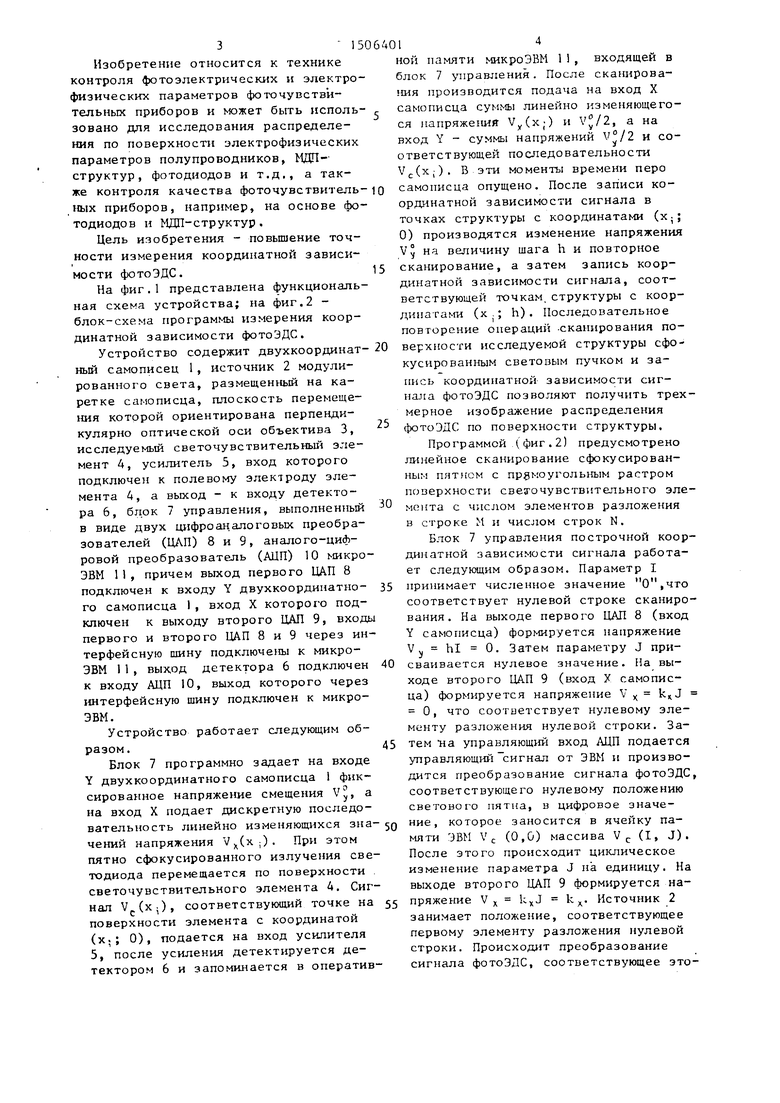
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ДЕФЕКТОВ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН БОЛЬШОЙ ПЛОЩАДИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013820C1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Устройство для ввода информации | 1985 |
|
SU1293725A1 |
| Устройство для считывания и отображения видеоинформации | 1988 |
|
SU1817116A1 |
| Устройство для электрофизиологических исследований | 1987 |
|
SU1616602A1 |
| Измеритель отношения сигнал/шум телевизионного сигнала | 1986 |
|
SU1406534A1 |
| Устройство для измерения параметров периодических импульсных сигналов | 1986 |
|
SU1406532A1 |
| РЕЛЬЕФОГРАФИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЗАПИСИ ИНФОРМАЦИИ | 1992 |
|
RU2031624C1 |
| Прецизионное сканирующее устройство | 1989 |
|
SU1714564A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ПРИЕМНИКОМ | 1987 |
|
RU2066937C1 |
Изобретение может быть использовано для исследования распределения по поверхности электрофизических параметров полупроводников, МДП - структур, фотодиодов. Цель изобретения - повышение точности измерения координатной зависимости фото ЭДС - достигается тем, что источник 2 модулированного света размещен на каретке двухкоординатного самописца 1. Плоскость перемещения каретки ориентирована перпендикулярно оптической оси объектива 3. Блок 7 управления имеет цифроаналоговые преобразователи (ЦАП) 8, 9 и микро ЭВМ 11. Выход ЦАП 8 и выход ЦАП 9 соединены с двухкоординатным самописцем 1, ЦАП 8 И 9 через интерфейсную шину соединены с микро ЭВМ 11, соединенной через аналогоцифровой преобразователь 10 с детектором 6. 2 ил.
Составитель Н.Саришвипи Редактор О.Юрковецкая Техред М.Холанич Корректор 0.Кравцова
Заказ 5432/48
Тираж 714
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
