Фиг Л
Изобретение относится к сельскому хозяйству, к промышленному животноводству.
Целью изобретения является повышение точности регулирования загрузки рабочего органа кормушки.
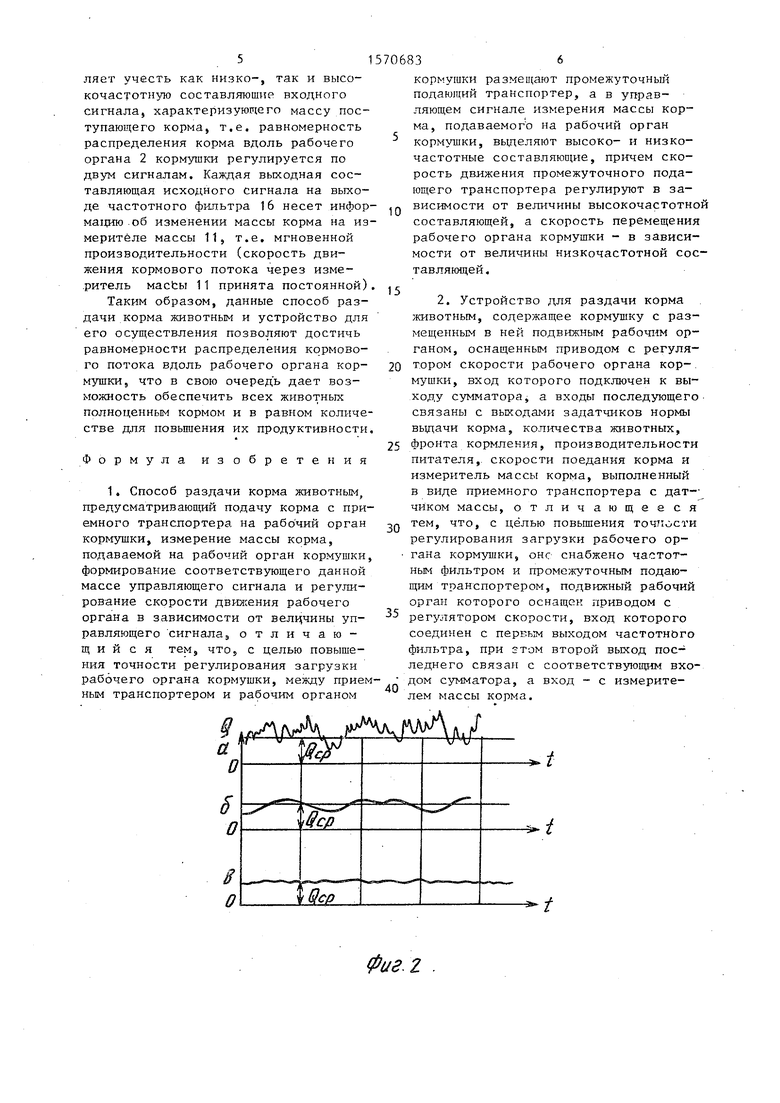
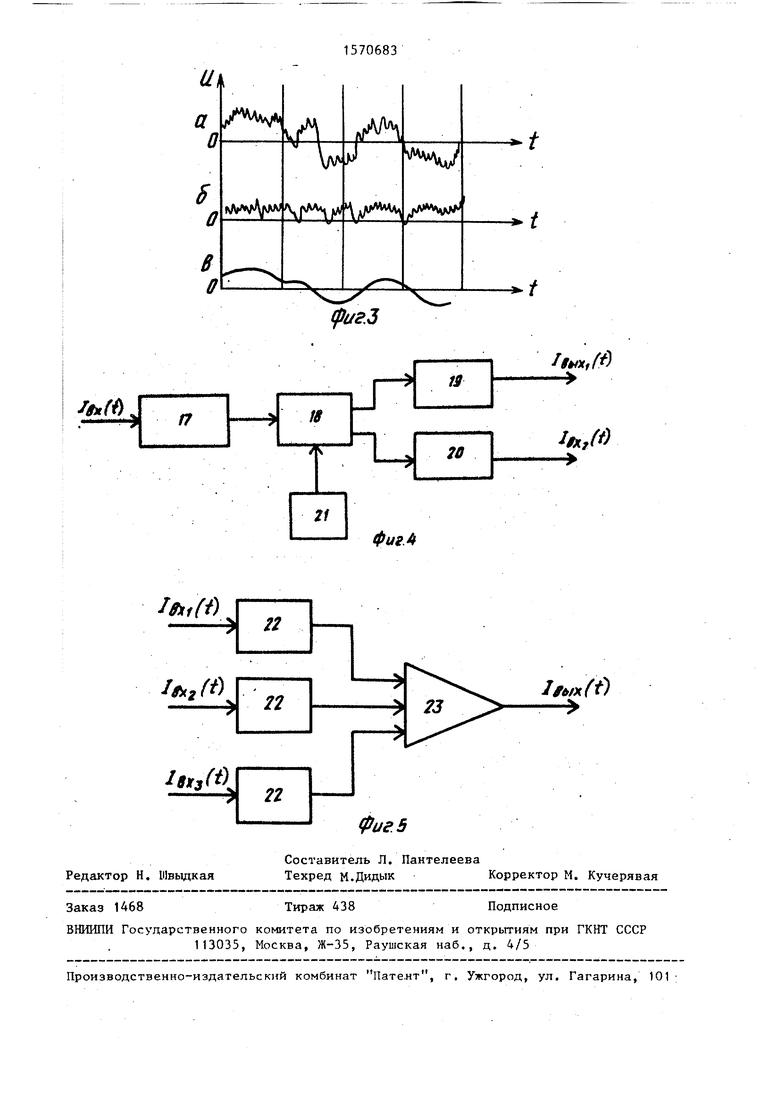
На фиг. 1 представлена функциональная схема устройства для раздачи корма; на фиг. 2 - временные диаграммы работы элементов устройства; на фиг. J - временные диаграммы работы элементов частотного фильтра; на фиг„ 4 - обобщенная структурная схема фильтра; на фиг,5 обобщенная структурная схема сумматора.
Устройство для раздачи корма животным включает приемную воронку 1, кормушку с размещенным в ней рабочим органом 25 механически соединенным с приводом 3, снабженным регулятором скорости 4, который входом подключен к выходу сумматора 5S подключенного входами к выходам задатчиков НОРМЫ выдачи корма 6, количества животных 7, фронта кормления 8, производительности питателя 9, скорости поедания корма 10, измеритель 11 массы ко рма с датчиком 12 массы, установленный между измерителем массы 11 и кормушкой промежуточный подающий транспортер с рабочим органом 13,1 механически связанным с приводом 14 снабженным регулятором скорости 15, который входом подключен к первому выходу частотного фильтра 16, второй выход которого подключен к входу сумматора 5, а вход - к выходу датчика 12 измерителя массы 11
Частотный фильтр 6 представляет собой устройство, разделяющее входной несинусоидальный сигнал TM(t), несущий информацию об изменении массы на датчике 12, на два выходных с заданными частотными диапазонами Ium,(t) и ISbK2.(t) Структурная схема частотного фильтра 16 зависит от используемого способа фильтрации и применяемой элементной базы. Можно, например, использовать электрический фильтр и цифровые на интегральных микросхемах и микропроцессорах фильтры.
Частотный фильтр 16 содержит усилитель-формирователь 17, блок 18 разделения входного сигнала по заданным частотным характеристикам, блоки 19 и 20 усиления и согласования с соответственно низко- и высо5
0
5
0
0
5
кочастотных составляющих, блок 21 задатчиков.
Изменение структурной схемы приводит к изменению алгоритма работы частотного фильтра 16. В любом случае входные и выходные сигналы должны соответствовать представленным на фиг, 3,
В качестве регуляторов скорости 4 и 5 могут быть использованы тиристор- ные преобразователи частоты типа ТПТР,
В состав сумматора 5 входят усилители-формирователи 22 входных сигналов и блок суммирования 23.
Устройство, в котором осуществляется способ раздачи корма,, работает следующим образом.
При поступлении первой порции кор- мэ из приемной воронки 1 на измеритель 11 срабатывает его датчик 12 и запускает приводы 3 и 14. Привод 3 начинает переметать рабочий орган 2 кормушки со скоростью, определяемой сигналами, поступающими после сумми- роваЫдЧ9 сумматором 5Э с задатчиков нормы выдачи корма 6, количества животных 7, фронта кормления 8, производительности питателя 9, скорости поедания корма 10, и второго выхода частотного фильтра 16. Привод 14 начинает перемещать рабочий орган 13 подающего ггромежутдчного транспортера со скоростью, определяемой сигналом, поступающим с первого выхода частотного фильтра 16, вход которого соединен с выходом датчика 12 измерителя массы 11 В .процессе работы кормораздающей линии датчика 12 измерителя массы 11 поступает полный сигнал,, характеризующий неравномерность кормового потока, который частотным фильтром 16 разделяется на две составляющие, одна из которых (высокочастотная) управляет регулятором 15 скорости, а другая (низкочастотная) поступает в сумматор 5, который управляет регулятором 4 скорости. Регуляторы 4 и 15 скорости воздействуют на приводы 3 и 14, которые изменяют скорость передвижения рабочих органов 2 и 13 подающего эле мента и кормушки.
При достижении рабочим органом 2 кормушки конечного положения (последнего животного) приводы 4 и 14 от ключаются оператором. Следовательно, способ раздачи корма животным позво51
ляет учесть как низко-, так и высокочастотную составляющие входного сигнала, характеризующего массу поступающего корма, т.е. равномерность распределения корма вдоль рабочего органа 2 кормушки регулируется по двум сигналам. Каждая выходная составляющая исходного сигнала на выходе частотного фильтра 16 несет информацию об изменении массы корма на измерителе массы 11, т.е. мгновенной производительности (скорость движения кормового потока через измеритель массы 11 принята постоянной).
Таким образом, данные способ раздачи корма животным и устройство для его осуществления позволяют достичь равномерности распределения кормового потока вдоль рабочего органа кормушки, что в свою очередь дает возможность обеспечить всех животных полноценным кормом и в равном количестве для повышения их продуктивности.
Формула изобретения
1. Способ раздачи корма животным, предусматривающий подачу корма с приемного транспортера на рабочий орган кормушки, измерение массы корма, подаваемой на рабочий орган кормушки, формирование соответствующего данной массе управляющего сигнала и регулирование скорости движения рабочего органа в зависимости от величины управляющего сигнала, отличающийся тем, что, с целью повышения точности регулирования загрузки рабочего органа кормушки, между приемным транспортером и рабочим органом
570683
кормушки размещают промежуточный подающий транспортер, а в управляющем сигнале измерения массы корма, подаваемого на рабочий орган кормушки, выделяют высоко- и низкочастотные составляющие, причем скорость движения промежуточного подающего транспортера регулируют в зависимости от величины высокочастотной составляющей, а скорость перемещения рабочего органа кормушки - в зависимости от величины низкочастотной составляющей.
2. Устройство для раздачи корма животным, содержащее кормушку с размещенным в ней подвижным рабочим органом, оснащенным приводом с регулятором скорости рабочего органа кормушки, вход которого подключен к выходу сумматора, а входы последующего связаны с выходами задатчиков нормы выдачи корма, количества животных,
Фронта кормления, производительности питателя, скорости поедания корма и измеритель массы корма, выполненный в виде приемного транспортера с датчиком массы, отличающееся
тем, что, с целью повышения точности регулирования загрузки рабочего органа кормушки, онг снабжено частотным фильтром и промежуточным подающим транспортером, подвижный рабочий орган которого оснащен приводом с регулятором скорости, вход которого соединен с первым выходом частотного фильтра, при этом второй выход последнего связан с соответствующим входом сумматора, а вход - с измерителем массы корма.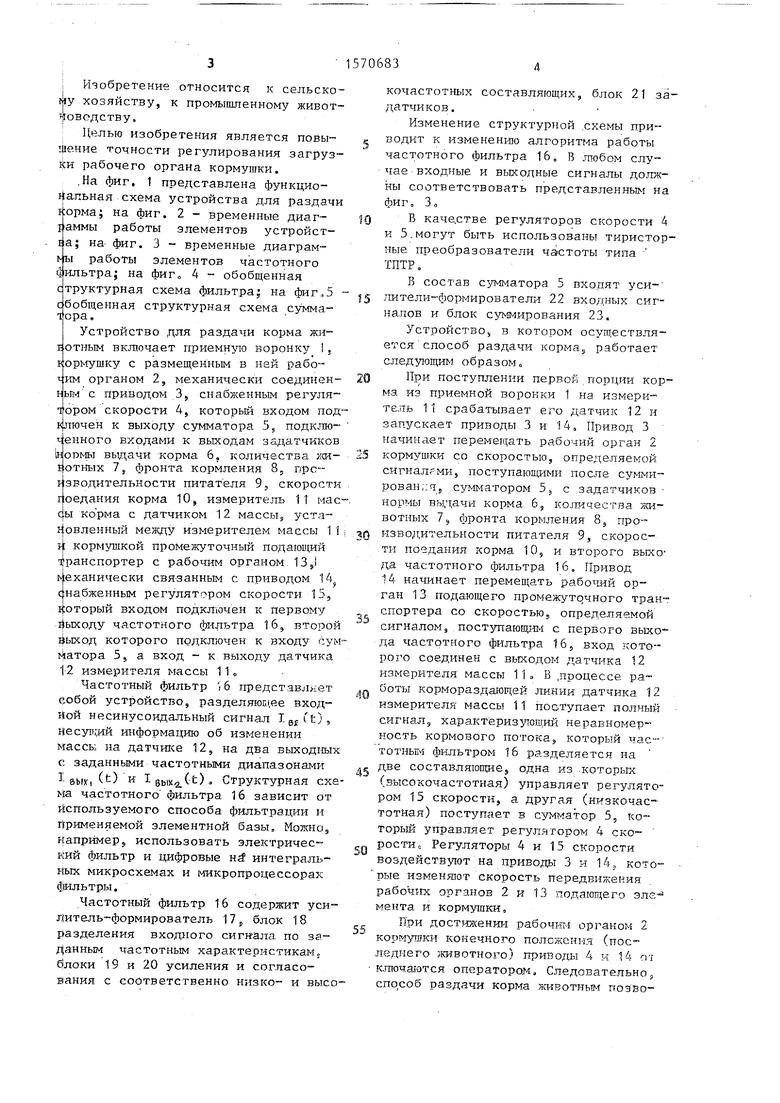
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ раздачи корма животным и устройство для его осуществления | 1982 |
|
SU1029931A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1979 |
|
SU888882A1 |
| Автоматический питатель раздатчика кормов | 1986 |
|
SU1445651A1 |
| СПОСОБ КОНВЕЙЕРНОГО СОДЕРЖАНИЯ И ОБСЛУЖИВАНИЯ КОРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2010504C1 |
| Линия для раздачи кормов | 1980 |
|
SU935032A1 |
| Способ раздачи кормов животным и устройство для его осуществления | 1985 |
|
SU1304790A1 |
| Устройство индивидуальной раздачи кормов | 1989 |
|
SU1782497A1 |
| Система индивидуальной раздачи концентрированных кормов | 1990 |
|
SU1750520A1 |
| Устройство для раздачи кормов | 1981 |
|
SU1015871A1 |
| Способ раздачи кормов животным | 1989 |
|
SU1666000A1 |
Изобретение относится к сельскому хозяйству, к промышленному животноводству. Цель изобретения - повышение точности регулирования загрузки рабочего органа кормушки. Устройство для раздачи корма животным содержит приемную воронку, подающую поток корма на рабочий элемент измерителя 11 массы корма с датчиком 12 массы. Промежуточный подающий транспортер с рабочим органом 13 снабжен приводом 14. В кормушке размещен подвижный рабочий орган 2, механически связанный с приводом 3. Приводы 3, 14 оснащены регуляторами скорости 4, 15, связанными соответственно с выходами сумматора 5 и частотного фильтра 16. Способ раздачи корма предусматривает выделение по частоте из исходного сигнала высоко- и низкочастотных составляющих, которые используются соответственно для регулирования скорости перемещения рабочих органов 13 и 2 промежуточного подающего транспортера и кормушки. Учет быстроизменяющего потока корма позволяет обеспечить повышение равномерности распределения корма на рабочем органе 2 кормушки. 2 с.п. ф-лы, 5 ил.
Фиг. г .
ш
a о
В о
(риг.З
-fctrt)
п
18
Редактор Н. Швьщкая
Составитель Л. Пантелеева
Техред М.ДидыкКорректор М. Кучерявая
Заказ 1468
Тираж 438
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
+ t
19
/W) -
фигЛ
Подписное
| Способ раздачи корма животным и устройство для его осуществления | 1982 |
|
SU1029931A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
