Изобретение относится к вспомогательному оборудованию в манипуляторах, предназначенных для дистанционных работ в боксах и защитных камерах, а именно к шаровым опорам прей- мужественно шпаговык манипуляторов.
Цель изобретения - снижение энергозатрат на управление манипулятором.
На фиг. 1 изображена шаровая опора манипулятора, вертикальный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3, - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 1.
Шаровая опора преимущественно щпа- гового манипулятора состоит из разъемного корпуса, имеющего две части 1 и 2 с соосными отверстиями 3 и 4 с телесным углом. В корпусе имеется гнездо, в котором установлен шар 5, внутри последнего выполнено отверстие 6 под шпагу манипулятора. Причем часть 2 корпуса устанавливается в расточке биологической защитной стены, а часть 1 корпуса после монтажа всей опоры посредством кольца 7 и болтов 8 притягивается к биологической защитной стене.
В корпусе в плоскости, перпендикулярной оси отверстия корпуса, установлены гнезда 9, в которых посредством резьбовых втулок 10 на подшипниках 11 установлены цапфы 12. Каждая цапфа 12 снабжена кареткой 13, имеющей конические ролики 14, установленные попарно в подшипниках 15 на осях 16, закрепленных на каретке симметрично относительно оси цапфы в плоскости, перпендикулярной оси отверстия корпуса« В каждой каретке 13 дополнительно выполнена расточка 17, соос- ная с отверстием под цапфу 12. ; В расточке 17 расположен упругий элемент, например, пружина 18, предназначенная для пожатия каретки 13 к шару 5.
Шаровая опора манипулятора работает следующим образом.
При повороте шара 5 в горизонтальной плоскости он увлекает за собой
5
0
0
конические ролики-14 вместе с каретками 13, поджатыми к шару 5 пружинами 18. Каретки 13 поворачиваются вместе с цапфами 12 на подшипниках 11.
При повороте шара 5 в вертикальной плоскости он приводит во вращение конические ролики 14 на подшипниках 15.
При повороте шара 5 в любом направлении оба эти вращения - кареток
13и конических роликов 14 - складываются.
Пружина 18j опираясь одним торцом на буртик цапфы 12, а другим-на дно расточки 17 каретки, обеспечивает постоянный контакт конических роликов
14с поверхностью шара 5.
Оснащение вертикальных цапф поворотными каретками с роликами на подшипниках позволяет и в случае значительной толщины биологической защиты выполнить основной злемент опоры в виде цельного шара, что упрощает конструкцию опоры и повьш1ает технологичность ее изготовления.
Формула изобретения
Шаровая опора преимущественно шпа- гового манипулятора, содержащая разъем-; ный корпус, имекяций соосные отверстия, шар с отверстием под шпагу манипулятора, а также цапфы, установленные 6 подшипниках в шюскости, перпендикулярной О.СИ отверстия корпуса, отличающаяся тем, что, с целью снижения энергозатрат на управление манипулятором, каждая цапфа снабжена кареткой, имеющей конические ролики, установленные попарно в подшипниках на осях, закрепленных на каретке симметрично относительно оси цапфы в плоскости, перпендикулярной оси отверстия корпуса, а также упругим элементом, расположенным в дополнительно выполненной расточке каретки соосно цапфе, предназначенным для Поджатия каретки к шару.
Л-А
12
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2018 |
|
RU2697292C1 |
| Опора шаровая | 1974 |
|
SU531725A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Манипулятор | 2017 |
|
RU2671231C2 |
| Опора шпагового манипулятора | 2018 |
|
RU2706906C2 |
| Стенд для оценки качества манипуляторов | 1985 |
|
SU1301692A1 |
| Устройство для обработки внутренних поверхностей с защитной опорой | 1982 |
|
SU1086966A1 |
| ОПОРА ШПАГОВОГО МАНИПУЛЯТОРА | 2019 |
|
RU2721515C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
Изобретение относится к вспомогательному оборудованию в манипуляторах, предназначенных для дистанционных работ в боксах и защитных камерах, а именно к шаровым опорам преимущественно шаровых манипуляторов. Целью изобретения является снижение энергозатрат на управление манипулятором. Шаровая опора манипулятора состоит из разъемного корпуса шара 5 с отверстием 6 под шпагу манипулятора, а также цапф 12, установленных в подшипниках 11 в плоскости, перпендикулярной оси отверстия корпуса. При этом каждая цапфа 12 снабжена кареткой 13, имеющей конические ролики 14, а в каретке выполнена соосно с цапфой расточка 17, в которой расположен упругий элемент, предназначенный для поджатия каретки 13 к шару 5. 4 ил.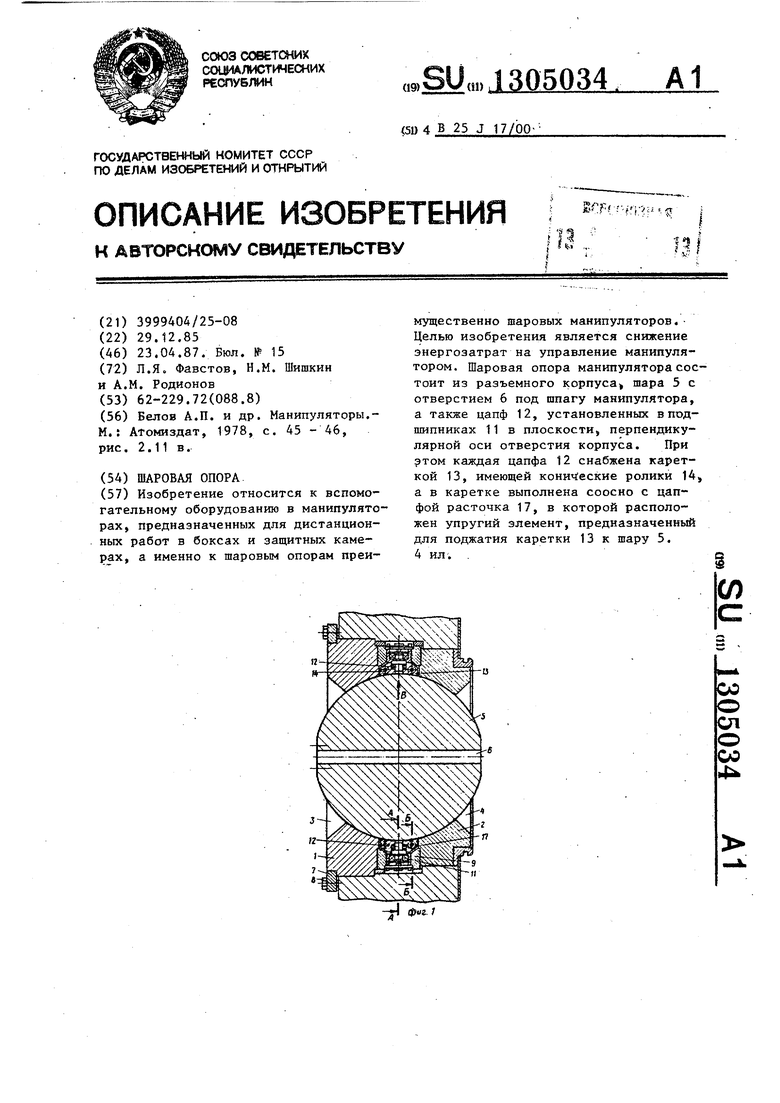
Фиг.З
Виде
Редактор Н. Бобкова
Составитель И. Бакулина
Техред Л. Сердюкова Корректор А. Обручар
Заказ 1373/14 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигМ
| Белов А.П | |||
| и др | |||
| Манипуляторы.- М.: Атомиздат, 1978, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
