1
Изобретение относится к машиностроению, а именно к промьшшенным роботам с цикловым управлением, г(ре;,назиаченным для захвата и ори- еигации деталей относительно технологического оборудования, а также для переноса их в различные точки обслуживаемого пространства.
Цель изобретения - повышение надежности и быстродействия привода за счет улучшения динамики подвижных частей при торможении в -точках позиционирования.
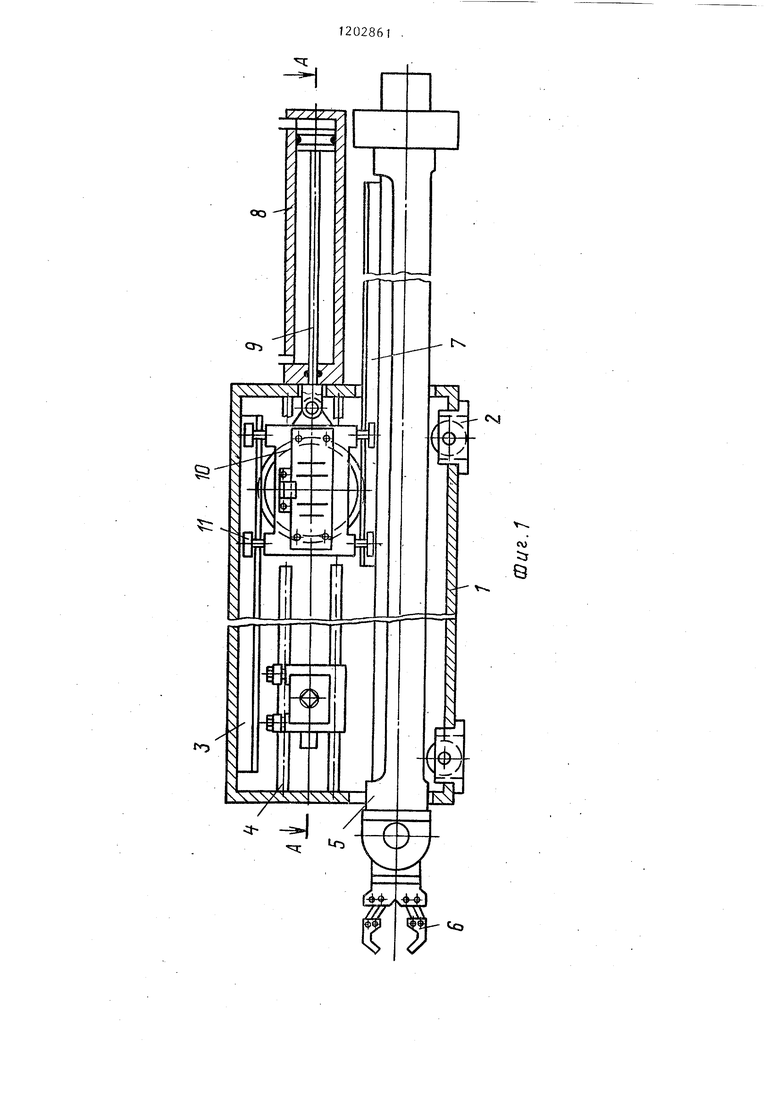
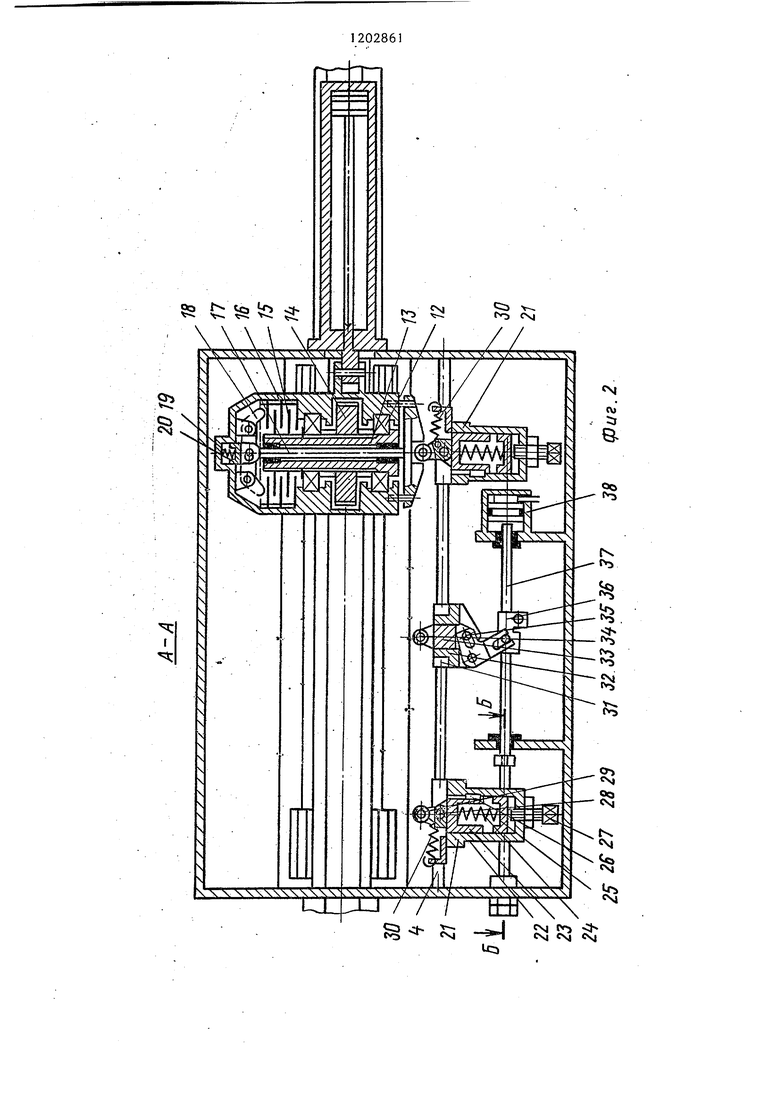
Па фиг. 1 представлена конструктив иая схема манипулятора; на фиг. 2 - разрез А-Л на -фиг. 1; на (1 И 3 - разрез Б-Б на фиг. 2.
г лиипулятор содержит основание 1 с :; крепленными на-нем шестью oiiopaMM 3 качения, зубчатой рейкой 3 и двумя скалками 4. В опорах качения с возможностью прямолинейных перемещений размещен подвилшый корпус руки 5 с установленнььми на нем схватом 6 и зубчатой рейкой. 7. Привод манипулятора содержит силовой цилиндр 8, закрепленный на задней вертикальной стенке основания 1. цилиндра 9 жестко соединен с i:;iу ч -гкой 10. На каретке установлены опоры 11 качения, удерживаю- ,ис ге. о i боковых смещений. Во внутренней полости каретки 10 (фиг. 2) смонтирован в подшипниках 12 каче- 1шя польй штицевЪй вал 13. На наружных шлицах полого шлицевого вала установлено цилиндрическое.зубчатое колесо 14 и подвижные диски. 15 фрик - многодисковой муфты, при этом колесо 14 находится в зацепле- ,нии с зубчатыми рейками 3 и 7. Неподвижные тормозные диски 16 (фиг. 2) зафиксированы от вращения в корпусе каретки 10. Толкатель 17 выполнен в виде фланца с двумя нак- скосами и фиксирующим пазом и стержнем, причем последний размещен внутри полого шлицевого вала 13 с возможностью осевых перемещений. Внутри каретки шарнирно установлены два рычага 18. Пружина 19 с подпятником 20 поджимает одно из плеч рычгов 18 к торцу стержня толкателя 1
На двух скалках 4 смонтированы. с возможностью перестановки вдоль скалок регулируемые упоры, при этом два крайних упора 2.1 (фиг. 2) имеют одинаковое исполнение, но уста-
1
1202861
новлены относительно один другого перевернутыми на 180. Упоры содержат корпус 22, во внутренней 1Щ- линдрической расточке которого раз- мещен с возможностью осевого перемещения ползун 23, пpyжJiнa 24 с подпятником 25.
Для ограничения хода и удержания
от поворота ползуна 23 в корпусе 22 установлена шпонка 26. Предварительное усилие поджатия ползуна регулируется установленным в резьбовом отверстии корпуса винтом 27. Снарулеи в цапфе ползуна установлена откидная собачка 28 с роликом 29, удерживаемая в рабочем положении пружиной 30 растяжения. Средний откидной упор 31 имеет корпус 32, в расточке которого размещен ползун 33 с роликом 34. В корпусе 32 шар- нирно установлен рычаг 35, одно из плеч которого связано с ползуном 33, другое - с державкой 36. Державка закреплена с возмолшостью перестановки на штоке 37 цилиндра 38 одностороннего действия, являющегося приводом управления от.кидного упора и закрепленного на неподвижном корпусе. Шток 37 жестко соединен с планкой 39, которая связана с двумя стержнями 40. Стержни 40 располагаются во втулках с наружной резьбой 41, жестко закрепленных в передней стенке основания. Внутри отверстий
втулок располагаются пруткины 42 сжатия, предварительное усилие поджатия которых на стержни 4, шток 37 и через рычаг 35 на ползун 33 регулируется при помощи накидных гаек 43, установленных на наружной рез-ьбе втулок 41.
Манипулятор работает следующим образом.
На фиг. .1 и 2 изображен корпус 5
руки во втянутом положении. В этом случае штоковая полость силового цилиндра 8 (фиг. 1) соединена с сетью подвода сжатого воздуха, а пори1невая - с атмосферой, при этом
ролик правого крайнего упора 21 размещен в фиксирующем пазу толкателя 17 каретки.
Лри выдвижении руки (направление перемещения влево) сжатьш воздух
подается в поршневую полость силового пневмоцилиндра 8, при этом штоковая полость соединяется с атмосферой. Поршень со штоком 9 начинает
перемещаться влево, воздействуя на каретку 10. Под действием усилия на штоке 9, направленного влево через каретку 10, правая сторона фиксирующего паза толкателя 17 воздействует на ролик 29 откидной собачки 28, разворачивает ее вокруг оси против часовой стрелки, растягивая пружину 30, освобождает толкатель с кареткой, и последняя начинает перемещаться влево. При этом цилиндрическое зубчатое колесо 14, обкатываясь по неподвижной рейке i.3, через зубчатую рейку 7 передает усилие на корпус руки 5 со схватом, заставляя его перемещаться влево, а откидная собачка 28 под действием пружины 30 возвращается в исходное положение. Во время перемещения подвижных частей подвижные фрикционные диски 15 муфты свободно вращаются вместе со пшицевым полым валом 13, так как пружина 19 через подпятник 20 отжимает рычаги 18 и толкатель 17, освобождая неподвижные тормозные диски 16.
При подходе к средней точке позиционирования левый наклонный скос толкателя 17 нажимает на ролик 34, утапливая ползун 33 в корпус среднего откидного упора 32. При этом ползун разворачивает рычаг 35, который через державку 36 перемещает щток 37 влево. Шток через планку 39 и стержни 40 сжимает пружины 42. Одновременно это усилие сжатия пружины передается на толкатель 17 и утапливает его в корпус каретки 10. Торец стержня толкателя разворачивает рычаги 18, которые через нажимной диск поджимают неподвижные диски 16 к подвижным дискам 15 тормоза Скорость вращения подвижных тормозных дисков 1.5, полого вала 13 и цилиндрического зубчатого колеса 14 уменьшается, что через зубчатую рейку 7 передается на подвижный корпус руки 5 и замедляет его перемещение. Интенсивность торможения при дальнейшем перемещении возрастает, так как наклонный скос толкателя 17 все больше .утапливает ролик с ползуном, сильнее сжимает пружины 42 и тем самым большее усилие под- жатия передается на тормозные диски. Останов каретки и руки происходит в тот момент, когда ролик ползуна под действием пружины западает в фиксирующий паз толкателя, при этом
подвижные части среднего упора - стержни, шток, рычаг и ползун возвращаются в исходное положение. Для перемещения руки со схватом в другую точку позиционирования, например
в переднюю, необходимо втянуть ползун 33 с роликом 34 в корпус 32 среднего упора, освободив толкатель 17. Давление сжатого воздуха при этом подается в рабочую поршневую
полость цилиндра 38 привода среднего упора, поршень со штоком 37 державкой 36 (Перемещаются влево,разворачивая рычаг 35 и втягивая ползун с роликом в корпус. Под давлением
сжатого воздуха в поршневой полости силового цилиндра 8 рука со схватом начинает перемещаться влево. При подходе к передней крайней точке позиционирования наклонньй скос толкателя 17 нажимает на ролик 29 пе- реднего упора и через откидную собачку 28 утапливает в корпус 22 ползун 23, которьй сжимает пружину 24. Далее процесс торможения и фиксация
руки со схватом в передней точке позиционирования происходят аналогично рассмотренному для среднего упора.
Перемещение подвижного корпуса
руки 5 со схватом в обратном направлении (вправо) происходит аналогично рассмотренному при движении влево с той разницей, что давление сжатого воздуха подается в штоковуй
полость силового пневмоцилиндра В, а поршневая полость при этом соединяется с атмосферой. При необходимости работы механизма по двум крайним точкам промежуточный средний
упор убирается приводом.
г- CM
:5 Q
to
go f to tr h
4 S- V. 51.
l
9
ITS
N
«M
«Si
5 Jr :S
CM «44 Cyj
.J
2
33
h1 0
Фи.З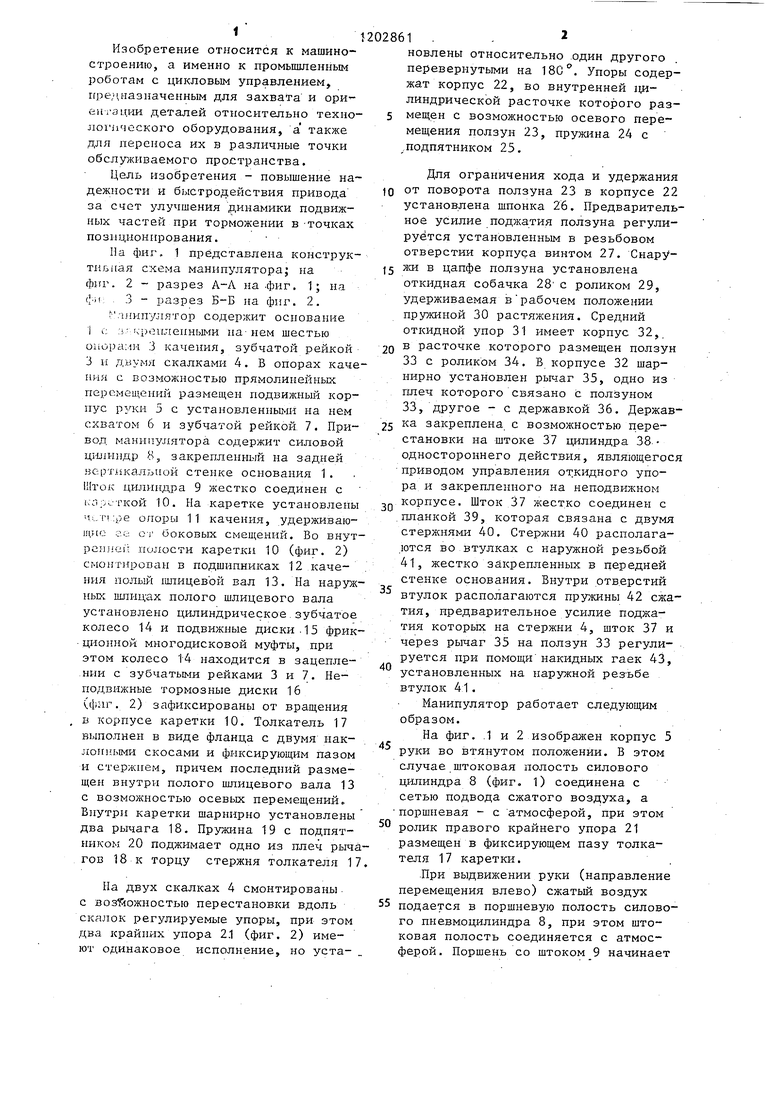

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1009754A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Механизм шаговой подачи | 1978 |
|
SU759181A1 |
| Линия для динамической балансировки роторов электродвигателей | 1987 |
|
SU1490521A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Устройство для перемещения деталей от пресса | 1986 |
|
SU1388161A1 |
| Манипулятор для извлечения отливок | 1985 |
|
SU1308426A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
Редактор A.Сабо
Составитель Е.Ермолаев,
Техред М.Надь Корректор О,Луговая
Заказ 8366/19 Тираж 1049Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1979 |
|
SU795938A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
