1
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов и автооператоров.
Целью изобретения является расширение технологических возможностей за счет работы с горячими заготовками.
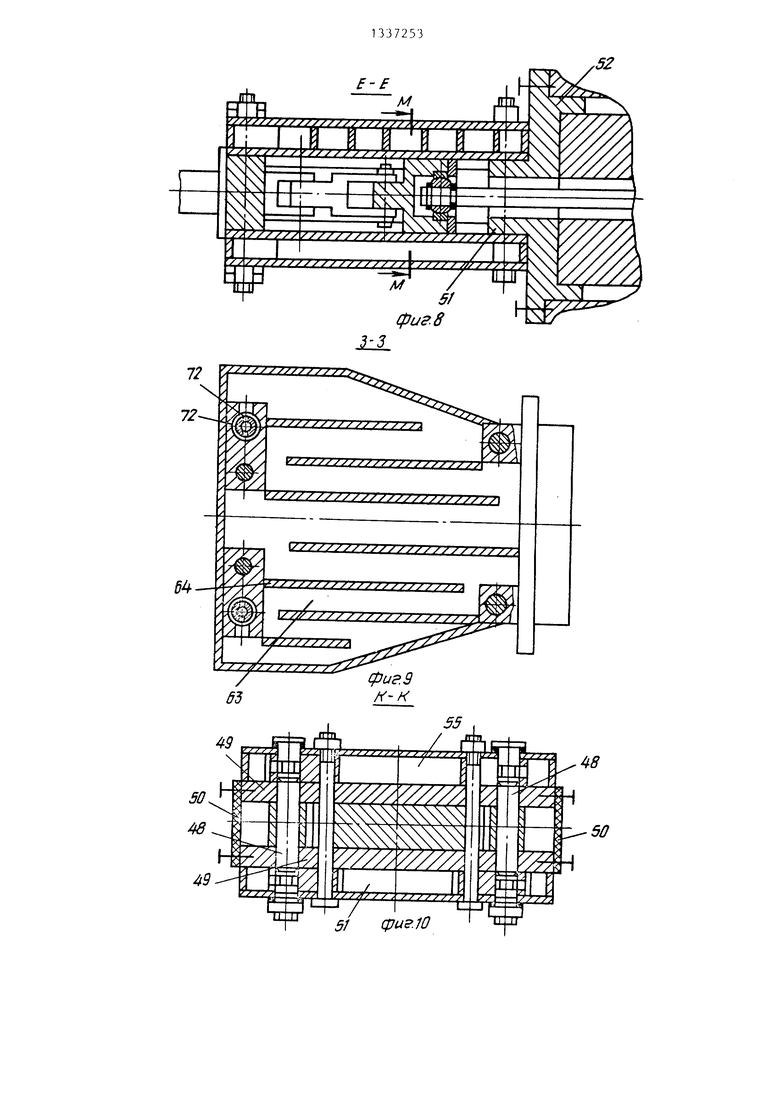
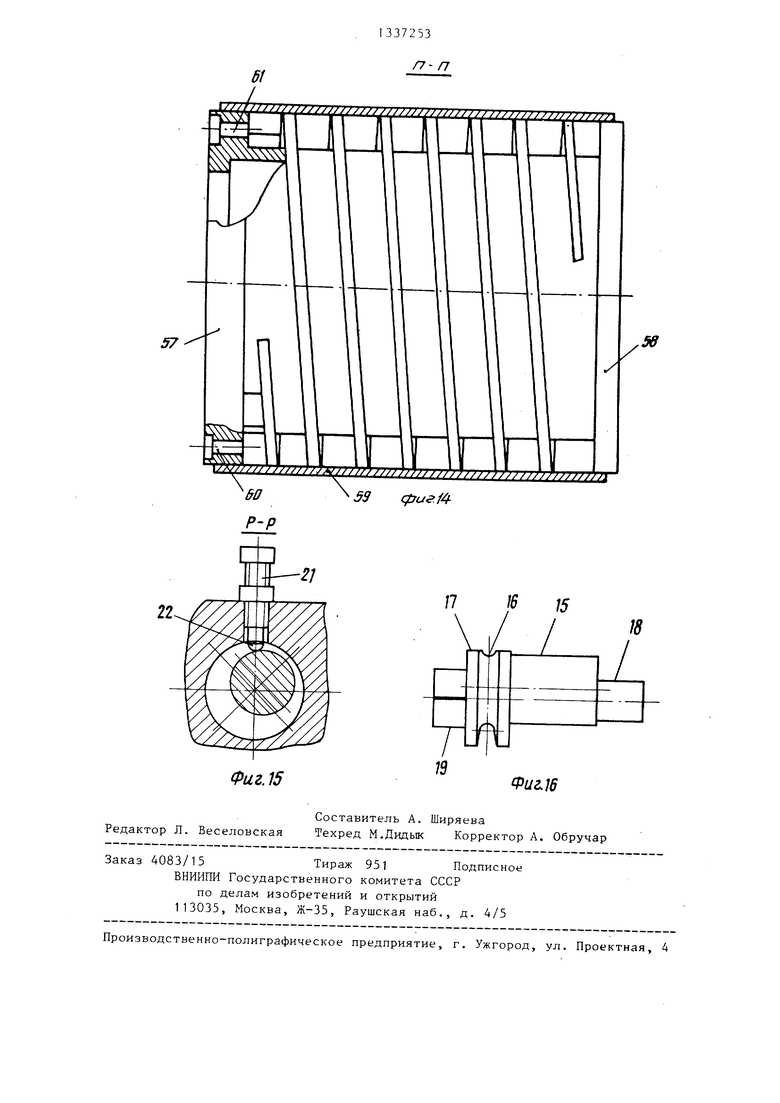
На фиг. 1 представлена рука манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - вид Г на фиг. 4; на фиг. 6 - разрез Д-Д на фиг. 5; на фиг. 7 - разрез Ж-Ж на фиг. 5; на фиг. 8 - разрез Е-Е на фиг. 6; на фиг. 9 - разрез 3-3 на фиг. 5; на фиг. 10 - разрез К-К на фиг. 5; на фиг. 11 - разрез Л-Л на фиг. 5; на фиг. 12 - разрез М-М на фиг. 8; на фиг. 13 - разрез Н-Н на фиг. 4; на фиг. 14 - разрез П-П на фиг. 13; на фиг. 15 - разрез Р-Р на фиг. 13; на фиг. 16 - эксцен риковая ось с радиусной канавкой.
Рука манипулятора содержит корпус 1, в котором на роликах 2 и 3 установлена каретка 4 с приводом 5 ее перемещения. На каретке 4 установлена кисть 6 с зажимными рычагами 7 и приводами ротации кисти 6 и перемещения зажимных рычагов 7, Ролики 2 при помощи подшипников
8установлены на осях 9 и 10, а ролики 3 при помощи подшипников 11 - на осях 9. Оси 10 размещены в крьш1- ках 12, посредством штифтов 13 связанных с корпусом 1, оси 9 установлены в проушинах 14 корпуса 1. Оси и 10 снабжены эксцентриками 15 и имеют наружные эксцентриковые коЛьц вые каналы 16. Цапфы 17 и 18 осей
9и 10 выполнены соосно, а векторы эксцентриситетов эксцентриков 15
и кольцевых каналов 16 направлены в одну сторону, величины этих векторов могут быть равны или же вектор эксцентриситета кольцевых каналов 16 по величине может быть больше вектора эксцентриситета эксцентрико 15. Оси 9 снабжены квадратными хвостовиками 19, а ось 10 - двумя квадратными хвостовиками 20. В проушина 14 и в крышках 12 корпуса 1 установлены регулировочные винты 21 со сферическими концами 22, предназначенными для взаимодействия с наружными эксцентриковыми кольцевыми канала3372532
ми 16. Привод 5 перемещения каретки 4 выполнен в виде двигателя 23 и зубчато-реечной передачи, рейка 24 которой смонтирована на каретке 4, а зубчатое колесо 25 связано с выходным валом двигателя 23. Корпус каретки 4 выполнен в виде трубы квадратного сечения, образованной
1Q из двух угольников 26, по торцам которой смонтированы две обоймы 27 и 28.
Привод ротации кисти 6 выполнен в виде двигателя (не показ ан), выход 5 ной вал которого кинематически связан с зубчатьи колесом 29, жестко связанным с корпусом кисти 6 посредством центрального вала 30, установленного соосно корпусу каретки 4 и выполнен20 ного в виде двух коаксиальных труб 31 и 32, жестко связанных с цапфами 33, установленными в подшипниках 34 шаровых опор 35 и 36, размещенных в обоймах 27 и 28. Вкладыши 37 шаро- 25 вых опор 35 и 36 выполнены с цилиндрическими поясками 38, в которые установлены уплотняющие манжеты 39, обеспечиваюшд1е защиту подшипников 34 от воды в случае большой несоос30 ности обойм 27 и 28. Вкладьш1И 37 и обоймы 27 и 28 снабжены ушютни- тельными кольцами 40. Привод перемещения зажимных рычагов 7 выполнен в виде двух силовых цилиндров 41, штоки 42 которых связаны с одним концом тяги 43 посредством коромысел 44. Другой конец тяги 43 посредством подшипника 45 установлен на ползуне 46, с которым связаны поворотные чаги 47, шарнирно установленные посредством осей 48 на корпусе кисти 6, образованном из щек 49 и кожухов 50, жестко связанных между собой и с зажимными рычагами 7.
Щеки 49 установлены на противоположные стороны сухаря 51 держателя 52 и жестко с ним связаны, между щеками 49 и осями 48 установлен про- ставок 53, жестко связанный с ще50
Рука манипулятора снабжена охлаждающей системой, включающей источник охлаждающей среды, плоские 54 и 55 и кольцевой 56 радиаторы. Кольцевой gg радиатор 56 установлен на держателе 52 коаксиально обойме 27 и состоит из внутренней 57 и наружной 58 оболочек с каналами, образованными между этими оболочками в виде двух винто35
45
вых полостей посредством перемычек 59. При этом с одного конца кольцевого радиатора 56 каналы сообщаютс между собой, а на торце другого конца во внутренней оболочке 57 выполнены отверстия 60 и 61, каждое из которых связано с соответствующими каналами кольцевого радиатора 56. На наружных поверхностях щек 49 установлены плоские радиаторы 54 и
55,кансшы 62 и 63 которых образованы стенками щек 49 и плоских радиаторов 54 и 55 и перемычками 64, при этом.каналы 62 и 63 взаимно перпендикулярны. Внутри корпуса каретки 4 выполнены две параллельные полости 65 и 66, образованные соответственно корпусом каретки 4 и коак сиально трубами 31 и 32, при этом полость 65 связана каналом 67, выполненным в корпусе каретки, с источник охлаждающей среды, а полость 66 каналом 68, выполненным в цапфе 33, св зана с внещней средой. В цапфе 33 и держателе 52 выполнены каналы 69
и 70. Канал 70 соединяет полость 65 с отверстием 60 кольцевого радиатора
56,а канал 69 соединяется с полостью 66.
В осях 48 выполнены осевые 71 и рдиальные 72 отверстия. Отверстие 61 кольцевого радиатора посредством канала 73 в держателе 52 и сухаре 51 связано с крайним каналом 62. При этом осевое отверстие 71 связано с каналами 62 и 63 плоских радиаторов 54 и 55, а осевое отверстие 71 другой оси 48 через радиальное отвер
стие 12 - с каналами 63 и 74, последний из которых выполнен в плоском радиаторе 55 и сообщается с каналом 69.
Рука манипулятора работает следующим образом.
Ротация кисти.
При подаче движения на зубчатое колесо 29 центральный вал 30 вращается в подщипниках 34 и вращает кисть 6.
Для работы в термальных условиях кисть 6 и каретка 4 подвергаются охлаждению. Охлаждающая среда, например вода, по каналу 67 подводится в каретку 4 и через полость 65, канал 70 в цапфе 33 и держателе 52 попадает в один из каналов кольцевог радиатора 56, затем охлаждающая среда попадает из одного канала кольцеш
15
м-. 25
20
37253
вого радиатора 56 в другой и, проходя по второму каналу, возвращается в начало кольцевого радиатора 56, а затем через отверстие 61 канала 73 поступает в каналы 62 плоского радиатора 54, далее через отверстия 72 и 71 оси 48 - в каналы 63 другого плоского радиатора 55, а из него через отверстия 72 и 71 другой оси 48 - в канал 74. Затем охлаждающая среда через канал 69 цапфы 33 попадает в полость 66, из нее по каналу 68 другой цапфы 33 поступает во внещнюю среду. Таким образом, при работе руки, например, в печи за счет отвода тепла от каретки 4 кисти 6, а также за счет защиты передней обоймы 27 кольцевым радиатором 56 сохраняется работоспособность подвижных элементов руки.
Регулирование положения каретки 4 и зубчатой рейки 24 относительно корпуса 1 и зубчатого колеса 25 привода перемещения 5 каретки 4.
Дпя регулирования зацепления зубчатой рейки 24 с зубчатым колесом 25 зубчатая рейка 24 вместе с кареткой 4 могут перемещаться вдоль вертикальной оси, т.е. приближаться к зубчатому колесу 25 или удаляться от него на величину, равную двойному эксцентриситету осей 9 и 10, при этом добиваются совпадения делительной прямой зубчатой рейки 24 и зубчатого колеса 25.
Для ликвидации перекоса боковых поверхностей зубьев зубчатой рейки .24 относительно боковых поверхностей зубьев зубчатого колеса 25 зубчатую рейку 24 вместе с кареткой 4 разворачивают в горизонтальной плоскости, используя эксцентриситеты боковых осей 9 обоих заделок jcapeT- ки 4 относительно корпуса 1 ( при этом используют по одной оси 9 в каждой заделке, расположенной с разных сторон относительно каретки 4). Таким образом, каретку 4 можно разворачивать как по часовой, так и против часовой стрелки.
Направляющие каретки 4, а также ролики 2 и 3 в процессе эксплуатации изнашиваются, что ведет к ухудшению условий работы реечно-зубчатого зацепления, снижению точности позиционирования, интенсивному износу роликов 2 и 3 и направляющих каретки 4. Ликвидировать последствия износа
30
35
40
45
50
55
элементов поэволяют оси 9 и 10 за счет эксцентриситета роликов 2 и 3, установленных на них, относительно цапф осей.
Для того, чтобы оси 9 и 10 не поворачивались относительно корпуса 1 , необходимо, чтобы отношение диаметра, на котором сидит подшипни к эксцентриситету этого диаметра по отношению к цапфам было бы больше 14, т.е. чтобы соблюдалось условие самоторможения. Однако в процессе работы во время переходных процессов, а также в том случае, если отношение - Н, необходимо оси 9
и
10 дополнительно фиксировать относительно корпуса 1, для этого на осях 9 и 10 выполнены эксцентричные кольцевые каналы 16 и векторы эксцентриситетов этих каналов 16 и эксцентриков 15 осей 9 и 10 направлены в одну сторону. Эксцентриковые кольцевые каналы 16 предназначены для взаимодействия с регулировочными винтами 21, которые контрят оси 9 и 10 относительно корпуса 1. При стремлении осей 9 цапфами 17 и 18 провернуться в проушинах 14, т.е. при стремлении эксцентриков 15 оси 9 с сидящими на ней роликом 2 .и подшипником 8 отойти от направляющей каретки 4, поверхность эксцентриковых каналов 16 давит на сферически конец 22 регулировочного винта 21, стремясь вытолкнуть его из проушины 14. Таким образом, регулировочный винт 21 препятствует отхождению ролика 2 от направляющей каретки 4, причем чем больше эксцентриситет эксцентрикового канала 16 относительно оси 9, тем надежнее стопорение. Такой же принцип стопорения применим для фиксации оси 10 относительно крышек 12, а сами крышки 12 относительно корпуса 1 фиксируются штифтами 13.
,
10
х й15
337253
Формула изобре.тения
1.Рука манипулятора, содержащая корпус, на осях которого расположены ролики, каретку, установленную на
этих роликах и несущую кисть с зажимными рычагами, а также приводы перемещения каретки и зажимных элементов и ротации кисти,при этом последний имеет двигатель, кинематически связанный с центральным валом, установленным соосно в корпусе каретки посредством шаровых опор и жестко связанным с кистью, отличающаяся тем, что, с целью расширения технологических возможностей за счет работы с горячими заготовками, она снабжена охлаждающей системой, включающей источник охлаждающей среды, плоские и кольцевой радиаторы с каналами, установленные на кисти и корпусе каретки, при этом центральный вал привода ротации кисти выполнен в виде коаксиальных труб, а полости, образованные корпусом каретки и коаксиальными трубами, связаны соответственно с источником охлаждающей среды, атмосферой и между собой посредством каналов радиаторов.
2.Рука по п. I, отличающаяся тем, что каналы плоских радиаторов расположены во взаимно перпендикулярных плоскостях, а каналы кольцевого радиатора выполнены между наружной и внутренней оболочками корпуса радиатора в виде двух винтовых полостей, сообщающихся между собой.
3.Рука по п. 1, отличающаяся тем, что, с целью повышения точности позиционирования за счет выборки зазоров, она снабжена эксцентриками, смонтированными на осях роликов, и регулировочными винтами, установленными на корпусе, при этом на осях роликов выполнены наружные эксцентриковые каналы для взаимодействия с регулировочными винтами.
20
25
30
35
40
45
В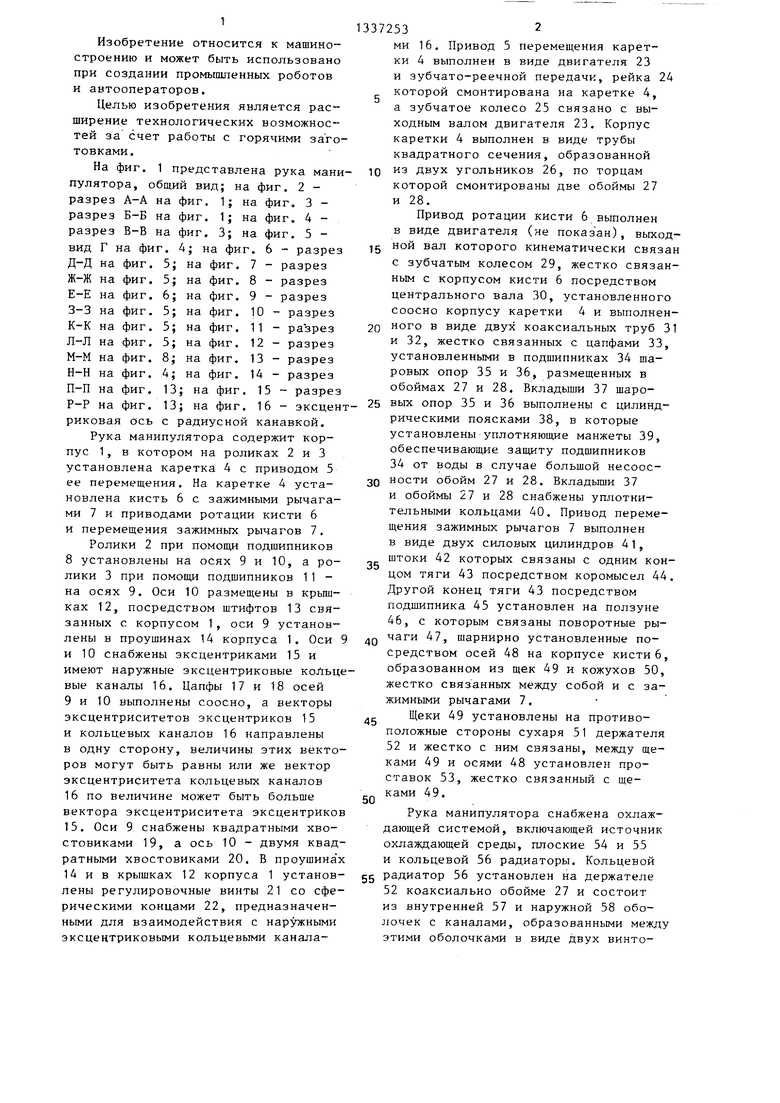
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Судовой лопастной движитель | 1939 |
|
SU59074A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Шарнир манипулятора | 1984 |
|
SU1256959A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| Устройство для регулирования пути движения коньков и направляющих пальцев нитеводителей плосковязальных машин | 1948 |
|
SU82558A3 |


Изобретение относится к области машиностроения и может быть использовано при создании промьшшенных роботов и автооператоров. Целью изобретения является расширение технологических возможностей за счет работы с горячими заготовками и повьшение точности позиционирования за счет возможности выборки зазоров в зубчатом зацеплении. Для достижения этой цели рука манипулятора снабжена охлаждающей системой,включающей источник охлаждающей среды, плоские и кольцевые 56 радиаторы с каналами, установленные соответственно на корпусе- кисти б и обойме 27 корпуса каретки. При этом в корпусе ка ретки имеются две параллельные полости, образованные корпусом каретки и двумя коаксиальными трубами 31 и 32 центрального вала 30 привода ротации кисти 6, каждая. из параллельных полостей связана соответственно с источником охлаждающей среды и внешней средой, а также соответствующими каналами и отверстиями с каналами плоских и кольцевого 56 радиаторов. Кроме того, ролики корпуса установлены на осях, снабженных эксцентриками и имеющих наружные эксцентриковые каналы, предназначенные для взаимодействия с регулировочными винтами, установленными в корпусе. При .этом векторы эксцентриситетов наружных эксцентриковых каналов могут быть равны по величине или больше эксцентриситетов эксцентриков и направлены в одну сторону. 2 з.п. ф-лы, 16 ил. в-ff Л1 it2 $ (Л 47
Фи.г.5 Л- Л
5/
фиг.6
74
фиг 9
49
50
м- м
V
f jf jf f XX
11
AxV.
фиг12
59
П
/
Фиг. 15
Фиг.Ю
Составитель А. Ширяева Редактор Л. Веселовская Техред М.Дндык Корректор А. Обручар
, -т- --. I-J .- ---,-.„- -.- - - .. - - - - -
Заказ 4083/15Тираж 951 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/3
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
