113
Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов, автооператоров.
Целью изобретения является улучшение динамических характеристик за счет возможности регулировки усилий зажима и уменьшения контактных напряжений.
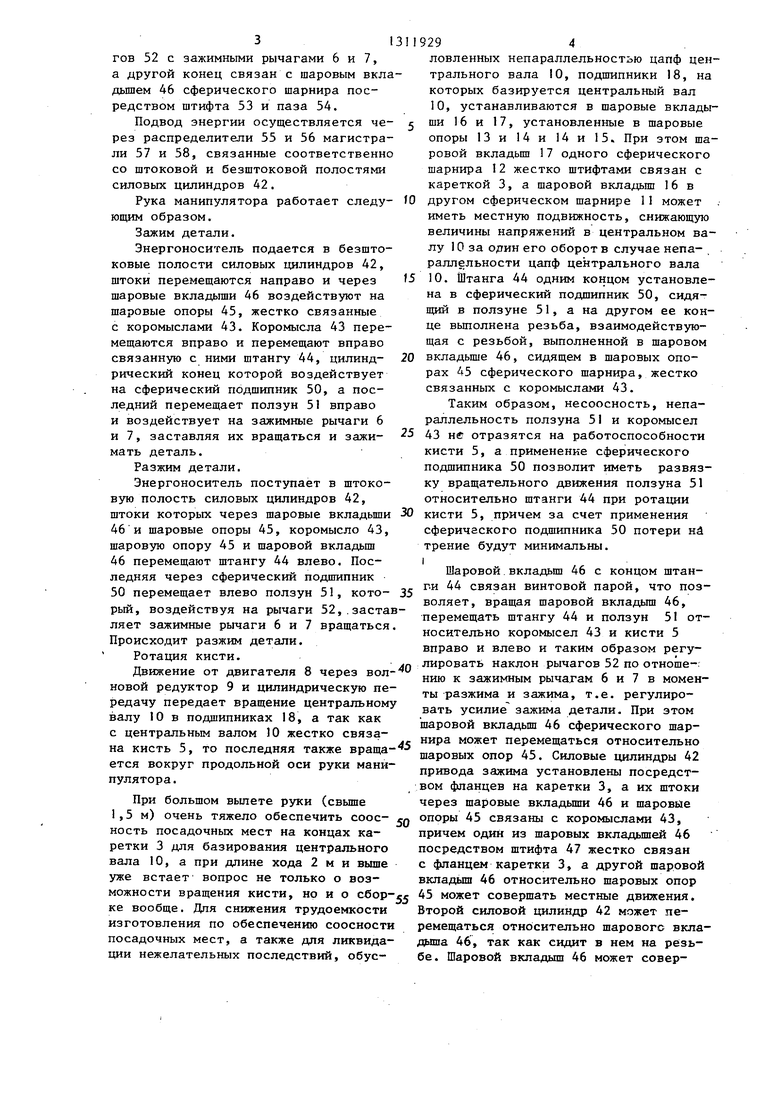
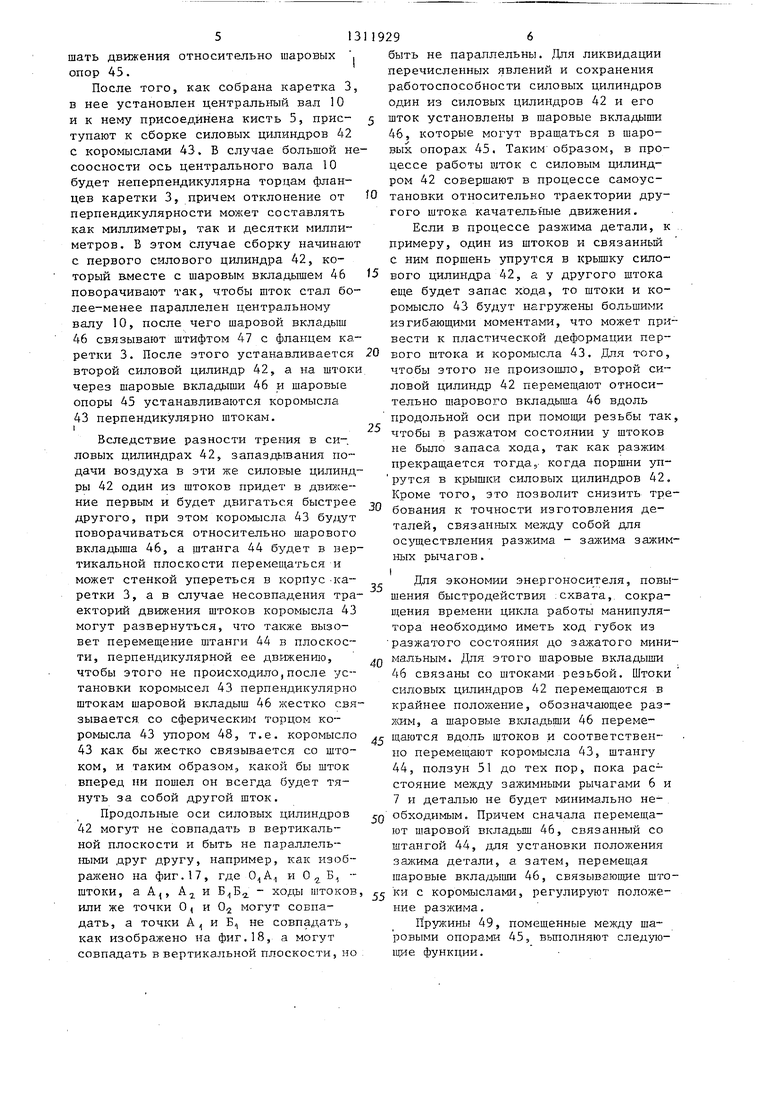
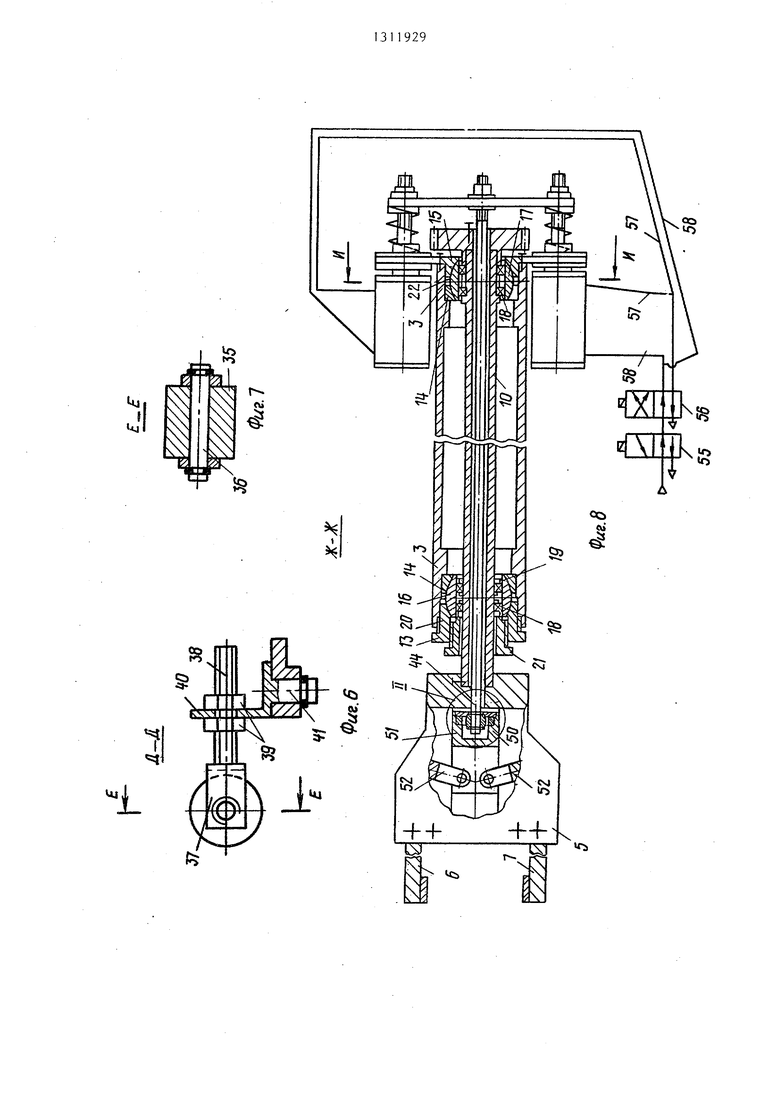
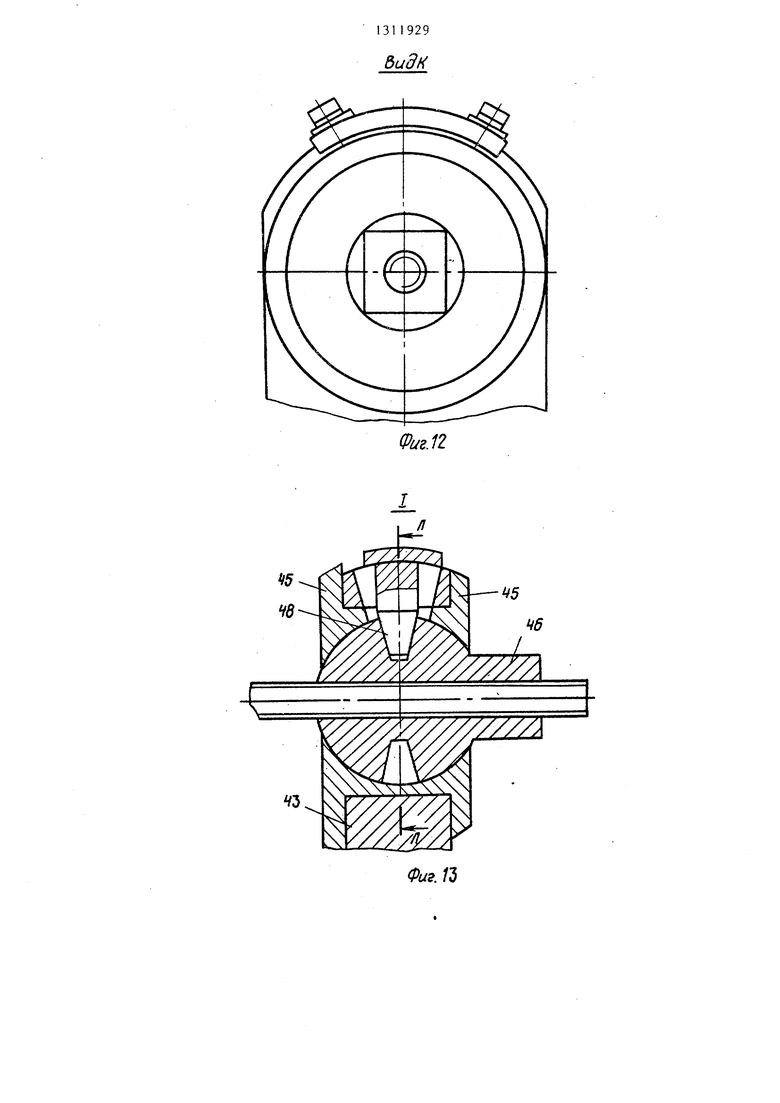
На фиг.1 схематично представлена рука манипулятора, общий вид; на фиг.2 - вид А на фигЛ; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.З; на фиг.5 - разрез Г-Г на фиг.З; на фиг.6 - разрез Д-Д на фиг.З; на фиг.7 - разрез Е-Е на фиг.6; на фиг.8 разрез Ж-Л{на фиг.З на фиг.9 - разрез 3-3 на фиг.1; на фиг.10 - цилиндры,коромысло и тяга, разрез; на фиг.11 - разрез И-И на фиг.8; на фиг.12 - вид К на фиг.10; на фиг.13 - узел I на фиг.10; на фиг.14 - разрез Л-Л на фиг.13; на фиг.15,- кинематическая схема руки манипулятора; на фиг.16 - одно из возможных положений центрального и выходного валов волнового редуктора (показаны оси, в направлении которых нужно перемещать волновой редуктор для регулировки зацепления сопряженных колес); на фиг.17 - расположение штоков силовых цилиндров в двух крайних положениях в вертикальной плоскости; на фиг.18 - то же, в горизонтальной плоскости; на фиг.19 - вид М на фиг.2; на фиг.20 - узел II на фиг.В.
Рука манипулятора содержит корпус 1, в котором на роликах 2 установлена каретка 3 с приводом ее перемещения 4 и несущая кисть 5 с зажимными рычагами 6 и 7, привод ротации кисти и привод зажимных рычагов.
Привод ротации кисти вьтолнен в виде двигателя 8 с волновым редуктором 9, выходной вал которого посредством цилиндрической передачи и центрального вала 10 связан с кистью 5. Центральный вал. 10 установлен с возможностью вращения в,каретке на двух сферических шарнирах 11 и 12, шаровые опоры 13 - 15 которых закреплены на каретке, а шаровые вкладьшш 16 и 17 - на подшипниках 18, -при этом один из этих сферических шарниров 11 снабжен упорным I9 и натяжным 20 кольцам контактируюш,ими с натяжной втулкой 21, установленной в атаровой опоре 13 по сферической поверхности, радиус к
19292
торой проведен из центра сферы шарового вкладьш1а 16, а шаровые опоры 15 и 14 и шаровой вкладьш 17 другого сферического шарнира 12 связаны с карет5 кой 3 штифтам : 22.
Двигатель 8 с волновым редуктором 9 установлен на каретке 3 посредством механизма самоустановки, выполненного в виде двзга пальцев 23, жест 0 ко связанных с корпусом двигателя 8 и волнового редуктора 9 и установленных посредством кронштейнов 24 с пазами 25 и клеммных соединений 26 на держателе 27, закрепленном при. помо щи подшипников 28 на оси 29, фланец которой жестко связан с платиком 30 с пазами 31, расположенными параллельно перемещению каретки 3 и перпендикулярно пазам 25, и демпфирующего
20
устройства, установленного на одном
5
0
из кронштейнов 24. Демпфирующее устройство выполнено в виде резьбового стакана 32, в котором помещены тарельчатые пружины 33, контактирующие с одним из пальцев 23, а на корпусе волнового редуктора 9 закреплены флажки 34,, контактирующие с роликами 35, сидящими на осях 36, установленных в серьгах 37, резьбовой конец которых 38 при помощи гаек 39 сидит в упорах 40, жестко связанных с осью 41, установленной в кронштейнах 24. Привод зажимных рычагов выполнен в виде двух силовьп цилиндров 42, 5 двух коромысел 43 и штанги 44, связанных между собой и кареткой 3 посредством сферических шарниров, шаро- .вые опоры 45 которых смонтированы соответственно на фланцах каретки 3 и коромыслах 43, а шаровые вкладьш1и 46 образуют соответственно со штангой 44, щтоками силовых цилиндров 42 и одним из корпусов силового цилиндра 42 винтовые пары, причем корпус друго- го силового цилиндра 42 жестко связан с шаровым вкладьщгем 46 сферического шарнира который посредством Е1тифта 47 связан с фланцем каретки 3. Шаровой вкладьщ 46 жестко связан со сферическим торцом 43 посредством упора 48, а между сферическими шарнирами на штоках силовых цилиндров 42 установлены пружины 49,
r Штанга 44 установлена внутри цен- трального вала 10 привода ротации
кисти, один конец которой связан посредством сферическ ого подшипника 50, установленного в ползуне 51, и рыча31
гов 52 с зажимными рычагами 6 и 7, а другой конец связан с шаровым вкладышем 46 сферического шарнира посредством штифта 53 и паза 54.
Подвод энергии осуществляется че- рез распределители 55 и 56 магистрали 57 и 58, связанные соответственно со штоковой и безштоковой полостями силовых цилиндров 42.
Рука манипулятора работает следу- ющим образом.
Зажим детали.
Энергоноситель подается в безшто- ковые полости силовых цилиндров 42, штоки перемещаются направо и через шаровые вкладьши 46 воздействуют на шаровые опоры 45, жестко связанные с коромыслами 43. Коромысла 43 перемещаются вправо и перемещают вправо связанную с ними штангу 44, цилинд- рический конец которой воздействует на сферический подшипник 50, а последний перемещает ползун 51 вправо и воздействует на зажимные рычаги 6 и 7, заставляя их вращаться и зажи- мать деталь.
Разжим детали.
Энергоноситель поступает в штоко- вую полость силовых цилиндров 42, штоки которых через шаровые вкладыши 46 и шаровые опоры 45, коромысло 43, шаровую опору 45 и шаровой вкладьш 46 перемещают штангу 44 влево. Последняя через сферический подшипник 50 перемещает влево ползун 51, кото- рый, воздействуя на рычаги 52,.засталяет зажимные рычаги 6 и 7 вращаться Происходит разжим детали.
Ротация кисти.
Движение от двигателя 8 через вол новой редуктор 9 и цилиндрическую передачу передает вращение центральном валу 10 в подшипниках 18, а так как с центральным валом 10 жестко связана кисть 5, то последняя также враща ется вокруг продольной оси руки манипулятора .
При большом вьшете руки (свыше 1,5м) очень тяжело обеспечить соос- ность посадочных мест на концах каретки 3 для базирования центрального вала 10, а при длине хода 2 м и выше уже встает вопрос не только о возможности вращения кисти, но и о сборке вообще. Для снижения трудоемкости изготовления по обеспечению соосности посадочных мест, а также для ликвидации нежелательных последствий, обус9294
ловленных непараллельностью цапф центрального вала 10, подшипники 18, на которых базируется центральный вал 10, устанавливаются в шаровые вкладыши 16 и 17, установленные в шаровые опоры 13и 14и 14и15., При зтом шаровой вкладьш 17 одного сферического шарнира 12 жестко штифтами связан с кареткой 3, а шаровой вкладьш 16 в другом сферическом шарнире 11 может иметь местную подвижность, снижающую величины напряжений в центральном валу 10 за один его оборот в случае непараллельности цапф центрального вала 10. Штанга 44 одним концом установлена в сферический подшипник 50, сидящий в ползуне 51, а на другом ее конце выполнена резьба, взаимодействующая с резьбой, выполненной в шаровом вкладьш1е 46, сидящем в шаровых опорах 45 сферического шарнира, жестко связанных с коромыслами 43.
Таким образом, несоосность, непараллельность ползуна 5I и коромысел 43 HS отразятся на работоспособности кисти 5, а применение сферического подшипника 50 позволит иметь развязку вращательного движения ползуна 51 относительно штанги 44 при ротации кисти 5, причем за счет применения сферического подшипника 50 потери Hd трение будут минимальны.
Шаровой.вкладьш 46 с концом штанги 44 связан винтовой парой, что позволяет, вращая шаровой вкладыш 46, перемещать штангу 44 и ползун 51 относительно коромысел 43 и кисти 5 вправо и влево и таким образом регулировать наклон рычагов 52 по отноше-. нию к зажимным рычагам 6 и 7 в моменты разжима и зажима, т.е. регулировать усилие зажима детали. При этом шаровой вкладьш 46 сферического шарнира может перемещаться относительно шаровых опор 45. Силовые цилиндры 42 привода зажима установлены посредством фланцев на каретки 3, а их штоки через шаровые вкладыши 46 и шаровые опоры 45 связаны с коромыслами 43, причем один из шаровых вкладышей 46 посредством штифта 47 жестко связан с фланцем каретки 3, а другой шаровой вкладыш 46 относительно шаровых опор 45 может совершать местные движения. Второй силовой цилиндр 42 может перемещаться относительно шарового вкладыша 46, так как сидит в нем на резьбе. Шаровой вкладыш 46 может совер
шать движения относительно шаровых , опор 45.
После того, как собрана каретка 3, в нее установлен центральный вал 10 и к нему присоединена кисть 5, приступают к сборке силовых цилиндров А2 с коромыслами 43. В случае большой несоосности ось центрального вала 10 будет неперпендикулярна торцам фланцев каретки 3, причем отклонение от перпендикулярности может составлять как миллиметры, так и десятки миллиметров . В этом случае сборку начинают с первого силового цилиндра 42, который в-месте с шаровым вкладьшем 46 поворачивают так, чтобы шток стал более-менее параллелен центральному валу 10, после чего шаровой вкладыш 46 связывают штифтом 47 с фланцем каретки 3. После этого устанавливается второй силовой цилиндр 42, а на штоки через шаровые вкладыши 46 и шаровые опоры 45 устанавливаются коромысла 43 перпендикулярно штокам.
,
Вследствие разности трения в си-, ловых цилиндрах 42, запаздывания подачи воздуха в эти же силовы.е цилиндры 42 один из штоков придет в двихсе чтобы в разжатом состоянии у штоков не было запаса хода, так как разжим прекращается тогда, когда поршни уп- рутся в крышки силовых цилиндров 42,
35
,, Кроме того, это позволит снизить трение первьм и будет двигаться быстрее: п
л бования к точности изготовления де- другого, при этом коромысла 43 будут
поворачиваться относительно шарового вкладыша 46, а штанга 44 будет в вертикальной плоскости перемещаться и может стенкой упереться в корпус -каретки 3, а в случае несовпадения траекторий движения штоков коромысла 43 могут развернуться, что также вызовет перемещение штанги 44 в плоскости, перпендикулярной ее движению, чтобы этого не происходило,после установки коромысел 43 перпендикулярно штокам шаровой вкладыш 46 жестко связывается, со сферическим торцом ко40
талей, связан:ных между собой для осуществления разжима - зажима зажимных рычагов.
I
Для экономии энергоносителя, повышения быстродействия :схвата,. сокращения времени цикла работы манипулятора необходимо иметь ход губок из разжатого состояния до зажатого минимальным. Для этого шаровые вкладыши 46 связаны со штоками резьбой. Штоки силовых цилиндров 42 перемещаются в крайнее положение, обозначающее раз- лшм, а шаровые вкладьши 46 перемеДля экономии энергоносителя, повы шения быстродействия :схвата,. сокращения времени цикла работы манипулятора необходимо иметь ход губок из разжатого состояния до зажатого мини мальным. Для этого шаровые вкладыши 46 связаны со штоками резьбой. Штоки силовых цилиндров 42 перемещаются в крайнее положение, обозначающее раз- лшм, а шаровые вкладьши 46 перемеромысла 43 упором 48, т.е. коромысло , щаются вдоль штоков .и соответствен43 как бы жестко связывается со штоком, и таким образом, какой бы шток вперед ни пошел он всегда будет тянуть за собой другой шток.
Продольные оси силовых цилиндров 42 могут не совпадать в вертикальной плоскости и быть не параллельными друг другу, например, как изображено на фиг. 17, где ,, и О Б., - штоки, а А,, А и , - хода штоков, гс или же точки О, и 0 могут совпадать, а точки А ;, и Б не совпадать, как изображено на фиг.18, а могут совпадать в вертикальной плоскости, но
но перемещают коромысла 43, штангу 44, ползун 51 до тех пор, пока расстояние между зажимными рычагами 6 и 7 и деталью не будет минимально не- JQ обходимым. Причем сначала перемегда- ют шаровой вкладыш 46, связанньш со штангой 44, д,пя установки положения зажима детали, а затем, перемещая шаровые вкладыши 46, связывающие што ки с коро1 5ыслами, регулируют положение разжима.
Пружинь 49, помещенные между шаровыми опорами 45, вьшолняют следую- нсие функции.
ш
, т20и,
3119296
быть не параллельны. Для ликвидации перечисленных явлений и сохранения работоспособности силовых цилиндров один из силовых цилиндров 42 и его шток установлены в шаровые вкладыши 46, которые могут вращаться в шаровых опорах 45. Таким образом, в процессе работы шток с силовым цилиндром 42 совершают в процессе самоустановки относительно траектории другого штока качательные движения.
Если в процессе разжима детали, к ,, примеру, один из штоков и связанньш
с ним поршень упрутся в КрЬШ1КУ СИЛО15 вого цилиндра 42, а у другого штока еще будет запас хода, то штоки и коромысло 43 будут нагружены большими изгибаюш,ими моментами, что может привести к пластической деформации первого штока и коромысла 43. Для того, чтобы этого не произошло, второй силовой цилиндр 42 перемещают относительно шарового вкладьш1а 46 вдоль продольной оси при помощи резьбы так,
чтобы в разжатом состоянии у штоков не было запаса хода, так как разжим прекращается тогда, когда поршни уп- рутся в крышки силовых цилиндров 42,
бования к точности изготовления де-
талей, связан:ных между собой для осуществления разжима - зажима зажимных рычагов.
I
Для экономии энергоносителя, повышения быстродействия :схвата,. сокращения времени цикла работы манипулятора необходимо иметь ход губок из разжатого состояния до зажатого минимальным. Для этого шаровые вкладыши 46 связаны со штоками резьбой. Штоки силовых цилиндров 42 перемещаются в крайнее положение, обозначающее раз- лшм, а шаровые вкладьши 46 перемещаются вдоль штоков .и соответственс
но перемещают коромысла 43, штангу 44, ползун 51 до тех пор, пока расстояние между зажимными рычагами 6 и 7 и деталью не будет минимально не- Q обходимым. Причем сначала перемегда- ют шаровой вкладыш 46, связанньш со штангой 44, д,пя установки положения зажима детали, а затем, перемещая шаровые вкладыши 46, связывающие штоки с коро1 5ыслами, регулируют положение разжима.
Пружинь 49, помещенные между шаровыми опорами 45, вьшолняют следую- нсие функции.
7В случае падения давления в силовых цилиндрах 42 за счет передачи чрез коромысла A3 усилия на штангу 4 предотвращают выпадение детали из зжимных рычагов 6 и 7.
При зажиме детали ликвидируют раличия сил трения в силовых цилиндра 42, т.е. перемещения вкладышей 46, соединяющих штоки, происходят с одинаковой скоростью, даже если не бу- дет упора 48, или же упор 48 не полностью будет выполнять свою функцию А при разжиме детали служат уравнительным механизмом одновременного нчала движения штоков.
Перемещая шаровые вкладьш1И 46, по штокам можно регулировать усилие на зажимных рычагах 6 и 7 за счет
сжатия пружины 49. I
Пружины 49 служат также для удержания заготовки во время осадки под прессом, т.е. заготовка, зажатая зажимными рычагами 6 и 7, ставится на стол пресса, в это время переключа- ется распределитель 56 и магистраль 58 соединяется с атмосферой или со сливом, переключается также распредлитель 55, знергоноситель в магистраль 57 не поступает и она оказывае ся .соединенной с атмосферой или со сливом, т.е. деталь на столе фиксируется зажимными рычагами 6 и 7 за сче сил пружин 49, и при осадке детали, т.е. при увеличении ее диаметра, зажимные рычаги 6 и 7 разжимаются, а пружины 49 сжимаются, а так как давления в силовых цилиндрах 42 нет, то поломки механизмов не происходит. В поведении детали при осадке появля- ется элемент неустойчивости, она стремится сместиться в сторону какого-либо из зажимных рычагов, допустим рычага 7; зажимной рычаг 7 поворчивается, а сила, с которой он воз- действует на деталь, возрастает и зависит от степени сжатия пружин 49. Таким образом, перемещая шаровые вкладьш1И 46, связанш 1е со штоками и штангой, можно регулировать усилия воздействия зажимных рычагов 6 и 7 н деталь при осадке. В этом случае, если центр детали при осадке сместится в сторону зажимного рычага 7, а зажимной рычаг не будет касаться сто роны детали, после прекращения осадки зажимной рычаг 7 под действием, пружин 49 будет перемещать деталь до тех пор, пока зажимной рычаг 6 на
5
0
5
О
5 Q Q 5 0 5
5
коснется детали. После этого ripcincxo- ,цит фиксация детали.
В случае большой несоосности посадочных мест каретки 3 ведомое зубчатое колесо цилиндрической передачи расположено под каким-то углом к продольной оси каретки 3, при этом ведущее зубчатое колесо необходимо выставить параллельно ведомому зубчатоьгу колесу (фиг.16). Для этого нужно повернуть волновой редуктор 9 в кронштейнах 24 относительно оси, образованной пальцами 23, а затем переме- щать.,волновой редуктор 9 вдоль оси Z, для чего складывается перемещение вдоль двух осей - X и Y. Вдоль оси X перемещение происходит за счет выполнения пазов 31 в платике 30 оси 29, т.е. волновой редуктор 9 можно перемещать вдоль каретки 3, а вдоль оси Y перемещение происходит в пазах 25, выполненных в кронштейнах 24. Поворот волнового редуктора 9 регулируется перемещением серег 37 через ролики 35, воздействующие на флажки 34, при этом .контакт всегда линейный, так как упор 40 поворачивается в кронштейнах 24 осью 41. Перемещая ведущее зубчатое колесо цилиндрической передачи вдоль осей X и Y и регулируя поворот волнового редуктора 9, добиваются правильного зацепления зубчатых колес и минимального зазора между боковыми сторонами зубьев.
Держатель 27 установлен на подшипниках 28 на оси 29 с тем, чтобы обеспечить равномерное распределение нагрузки по длине зубьев, т.е. волновой редуктор 9 во время вращения зубчатых колес качается вокруг оси 29, и происходит самоустановка.
Ось ведущего зубчатого колеса установлена вьше оси ведомого зубчатого колеса для того, чтобы в сопряжении этих колес люфт был нулевым или минимальным. При этом волновой редуктор 9 с ведущим зубчатым колесом могут перемещаться вдоль вертикальной оси (фиг.З). В случае неточного изготовления зубчатьпс колес пружины 33 служат для постоянного поджатия сторон зубьев ведущего зубчатого колеса к . сторонам зубьев ведомого зубчатого колеса, а клеммные соединения служат для регулирования посадки пальцев 23 в кронштейнах 24. Если зубчатые колеса изготовлены точно и нет необходимости в изменении межцентрового рас913
стояния в процессе работы, то ведущее зубчатое колесо вместе с волновым редуктором 9 опускают вниз до тех пор, пока не выберется люфт между колесами После этого клеммами зажимают пальцы 23. Опускание происходит за счет вворачивания стакана 32 в кронштейн 24 и воздействия его через пружины 33 на палец 23.
Таким образом, применение предлагаемой конструкции для связи зубчатых колес позволяет осуществить принцип самоустановки, что дает возможность ликвидировать различного рода перекосы осей, исключить неточность изготовления деталей, повысить долговечность колес. Для того, чтобы центральный вал 10 при зажиме зажимными рычагами 6 и 7 детали не прогибался под действием силовых цилиндров 42, подшипники 12 фиксируются в шаровом вкладыше 16, а подшипники 18 относительно шарового вкладьш1а 17 могут плавать. Формула изобретения
Рука манипулятора, содержащая корпус с роликами, каретку, установленную на роликах корпуса и несущую кисть с зажимными рычагами, приводы перемещения каретки, ротации кисти и перемещения зажимных рычагов, отличающаяся тем, что, с
целью улучшения динамических х-арактеI
5
ристик за счет регулировки усилий зажима и уменьшения контактных напряжений, привод перемещения зажимных рычагов выполнен в виде двух силовых
цилиндров, двух коромысел и штанги, связанных между собой и кареткой сферическими шарнирами, шаровые опоры которых смонтированы соответственно на каретке и двух коромыслах, а их шаровые вкладьши связаны винтовой передачей соответственно со штангой, штоками силовых цилиндров, корпусом Одного из упомянутых силовых цилиндров, при этом корпус другого силового цилиндра жестко связан с одним из шаровых вкладышей, а привод ротации кисти выполнен в виде двигателя с волновым редуктором, цилиндрической передачи с устройством самоустановки и центрального вала, установленного в каретке посредством сферических шарниров коаксиально щтанге привода перемещения зажимных рычагов, и с возможностью вращения относительно шаровых вкладьшгей этих сферических шарниров, причем устройство самоустановки зубчатых колес выполнено в виде держателя с демпфирующим устройством, смонтированного на каретке, а на корпусе двигателя привода ротации кисти закреплены дополнительно введенные пальцы,установленные с возможностью взаимодействия с демпфирующим устройством.
0
5
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| УСТРОЙСТВО для ВВЕДЕНИЯ В СОСУДЫ РЕНТГЕНОКОНТРАСТНЫХ ВЕЩЕСТВ | 1970 |
|
SU260084A1 |
| Подъемник для проведения монтажных работ | 1987 |
|
SU1534000A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |
| Грейферная подача для транспортировки листового материала вдоль линии прессов | 1983 |
|
SU1090475A1 |
| Силовая головка | 1990 |
|
SU1756030A1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1973 |
|
SU393843A1 |



Изобретение относится к области машиностроения и может быть использовано при создании промьшшенных роботов и автооператоров. Целью изобретения является улучшение динамических характеристик за счет возможности регулировать усилия зажима и уменьшения контактных напряжений. Для этого привод ротации кисти, выполненный в виде двигателя 8 с волновым редуктором 9, цилиндрической передачи с центральным валом 10, жестко связанным с кистью 5, и механизмом самоустановки, включаюш гм демпфирующее устройство, производит самоустановку зубчатых колес цилиндрической передачи с мишт- мальным люфтом. А выполнение привода зажимных рычагов 6 и 7 в виде двух силовых цилиндров 42, коромысел 43 и штанги 44, связанных между собой и кареткой 3 посредством сферических шарниров, шаровые опоры 45 которых жестко связаны соответственно с кареткой 3 и коромыслами 43, а шаровые вкладьши 46 образуют со штоками силовых цилиндров 42, штангой 44 и корпусом одного из силовых цилиндров 42 винтовые пары, позволяющие производить регулировку как усилий зажима зажимных рычагов 6 и 7, так и величину их хода. 20 ил. i СЛ tf2 «f ,-W tp w
kt.1
ЗУ
б±
9ие.2
26
Ж
(Риг. д
27
Фиг. 5
U4 f
«4J
1311929
3-3
f6
5lt
Фи.ю JL
uz. ii
дидК
Фиг. /3
Oi
л,
/1,
б, Фи2. Л
5, (Ри.18
Фаг. 1
ВидМ
S
5Ц
Фиг.20
Составитель А„ 11иряёва Редактор Н.Егорова Техред А.Кравчук Корректор М.Пожо
Заказ 1922/15 Тираж 954Подписное
ВБИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г,Ужгород5ул.Проектная,4
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
