1130
Изобретение относится к автоматике и может быть использовано для дистанционного контроля перемещений объектов или счета импульсов.
Цель изобретения - повышение дос- товерности устройства.
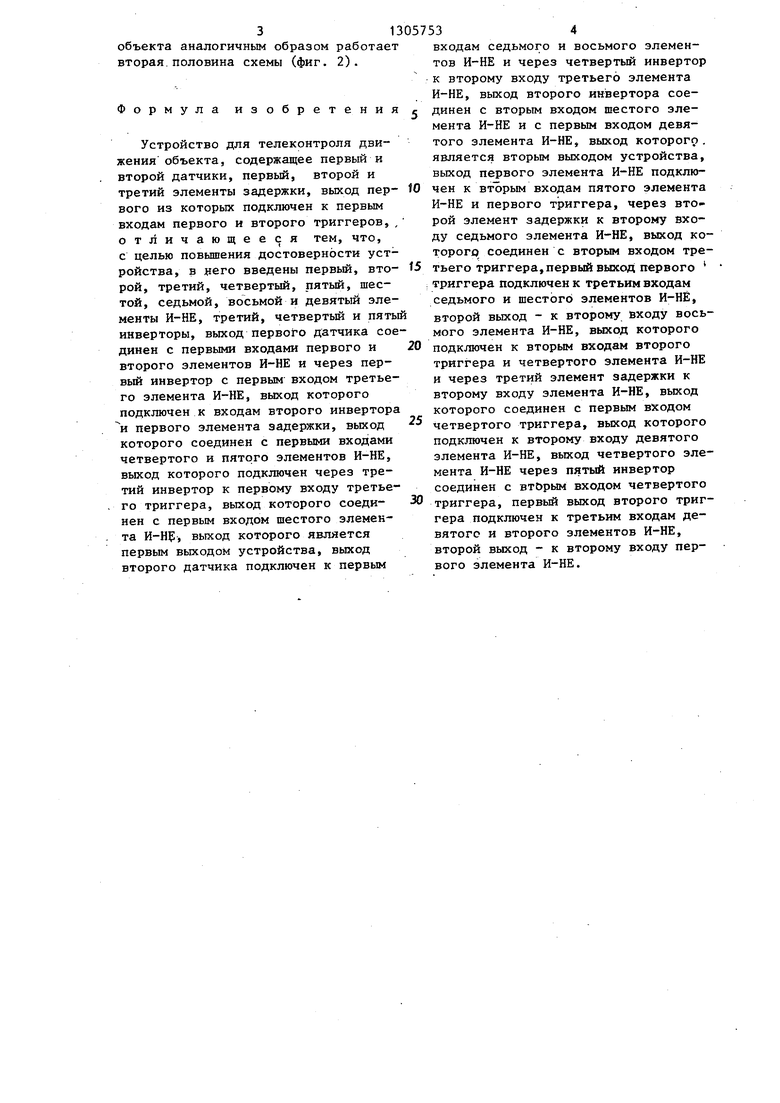
На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - временная диаграмма работы устройства,
Устройство содержит датчики 1 и 2, элементы И-НЕ 3-6, триггер 7, элемент 8 задержки, триггер 9, элементы И-НЕ 10-11, инвертор 12, триггер 13, элемент 14 задержки, триггер 15, элементы И-НЕ 16 и 17, инверторы 18-20, элемент И-НЕ 21, инвертор 22, элемент 23 задержки.
Датчики 1 и 2 устанавливают вдоль линии движения объектов, причем расстояние между зонами действия датчиков должно быть меньше длины самого маленького подлежащего контролю объекта. В исходном состоянии элемен ты И-НЕ,3 и 6 находятся в подготовленном состоянии. Элементы И-НЕ 4 и 5 заперты по третьим входам сигналом логического О с выходов триггеров 7 и 13.
При прохождении объектом зоны действия датчика 1 на выходе последнего появляется сигнал логической 1, Который поступает на первые входы элементов И-НЕ 3 и А. Подготовленный ранее элемент И-НЕ 3 переключается в состояни логического О, опрокидьтая триггер 7 в состояние логической 1 по первому выходу.Этот сигнал поступает на третьи входы элемента И-НЕ 10 и элемента И-НЕ 5. Одновременно сигналом логического О с второго выхода триггера 7 блокируется по второму входу элемент И-НЕ 6. Сигнал логического О с выхода элемента И-НЕ 3 через элемент 8 задержки запирает по второму входу элемент И-НЕ 5 и через элемент И-НЕ 11 и инвертор 12 блокирует по Первому входу триггер 9. Одновременно с этик сигналы логической 1 и логического О с датчиков 1 и 2 соответственно через инверт 1ры 19 и 20, элемент И-НЕ 21 и инвертор 22 запирают элементы И-НЕ 10 и 16. Сигнал логической 1 с выхода элемента И-НЕ 21 через элемент 23 задержки поступае на входы Элементов И-НЕ 11 и 17,
подготавливая их к переключению.
При перемещении объекта в зону действия датчика 2 (при этом объект перекрывает зоны действия датчиков 1 и 2 одновременно) сигнал логической 1 с выхода датчика 2 поступает на первые входы элементов И-НЕ 5 и 6, но элемент И-НЕ 5 заблокирован сигналом логического О с вьгхода
элемента И-НЕ 3 через элемент 8 задержки .
При смещении объекта от датчи- . ка 1 к датчику 2 (объект вышел из зоны действия датчика 1) сигнал на выходе датчика 1 падает до уровня логического О, а на выходе датчика 2 остается сигнал логической 1. При этом сигнал логического О поступает на первый вход элемента И-НЕ 3, переключая его в состояние логической 1. Этот сигнал отпирает элемент И-НЕ 1.1 и через инвертор 12 триггер 9.
Этот же сигнал через время задержки, определяемое элементом 8 задержки (Cj времени переключения инвертора 12), отпирает элемент И-НЕ 5, переключая его в состояние логического О, ко- торьй переключает триггер 9 в состояние логической 1 по прямому выходу . Сигнал логической 1 с пря- ,мого выхода триггера 9 поступает на первый вход элемента И-НЕ 10, подготавливая его к переключению. Элемент И-НЕ 10 остается заблокированным сигналом логического О по второму входу.
При выходе объекта из зон действия датчиков 1 и 2 сигнал на выходе датчика 2 падает до уровня логичеспп
О
с выхода датчиков 1 и 2 через(- инверторы 19 и 20 поступают на входы
элемента И-НЕ 21, переключая его в состояние логического О, который через инвертор 22 переключает эле- мент И-НЕ 10 в состояние логичес- кой 1. Этот сигнал идет на первый
выход устройства. Длительность выходного сигнала определяется элементом 23 задержки. Через время задержки, определяемое элементом 23, сигнал логического О с выхода элемента
21 сбрасывает по первому входу триггер 7, в исходное состояние триггер 9, запирая тем самым элемент И-НЕ 10 и возвращая схему в исходное состояние. При обратном ходе
объекта аналогичным образом работает вторая.половина схемы (фиг. 2).
Формула изобретения
Устройство для телеконтроля движения объекта, содержащее первый и второй датчики, первый, второй и третий элементы задержки, выход пер- вого из которых подключен к первым входам первого и второго триггеров, , отличающееся тем, что, с целью повышения достоверности устройства, в него введены первый, вто- рой, третий, четвертый, пятый, шестой, седьмой, восьмой и девятый элементы И-НЕ, третий, четвертый и пяты инверторы, выход первого датчика соединен с первыми входами первого и второго элементов И-НЕ и через первый инвертор с первым входом третьего элемента И-НЕ, выход которого подключен к входам второго инвертора и первого элемента задержки, выход которого соединен с первыми входами четвертого и пятого элементов И-НЕ, выход которого подключен через третий инвертор к первому входу третьего триггера, выход которого соеди- нен с первым входом шестого элемек- та И-Н, выход которого является первым выходом устройства, выход второго датчика подключен к первым
1305753
входам седьмого и восьмого элементов И-НЕ и через четвертый инвертор к второму входу третьего элемента И-НЕ, выход второго инвертора соединен с вторым входом шестого элемента И-НЕ и с первым входом девятого элемента И-НЕ, выход которого, является вторым выходом устройства, выход первого элемента И-НЕ подключен к втЪрым входам пятого элемента И-НЕ и первого триггера, через второй элемент задержки к второму входу седьмого элемента И-НЕ, выход которого соединен с вторым входом третьего триггера, первый выход первого триггера подключен к третьим входам седьмого и шестого элементов И-НЁ, второй выход - к второму входу восьмого элемента И-НЕ, выход которого подключен к вторым входам второго триггера и четвертого элемента И-НЕ и через третий элемент задержки к второму входу элемента И-НЕ, выход которого соединен с первым входом четвертого триггера, выход которого подключен к второму входу девятого элемента И-НЕ, выход четвертого элемента И-НЕ через пятый инвертор соединен с вт&рым входом четвертого триггера, первый выход второго триггера подключен к третьим входам девятого и второго элементов И-НЕ, второй выход - к второму входу первого элемента И-НЕ.
Фи,.1
еччхаЗ
Д
Hi
itn
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля движения объектов | 1984 |
|
SU1193714A1 |
| Устройство сопряжения с двухпроводной абонентской линией | 1989 |
|
SU1713118A1 |
| Устройство управления электродвигателями | 1981 |
|
SU1081621A1 |
| Устройство для сигнализации | 1987 |
|
SU1429147A1 |
| Система бесперебойного питания | 1990 |
|
SU1807546A1 |
| УСТРОЙСТВО ТЕЛЕСИГНАЛИЗАЦИИ | 1991 |
|
RU2029378C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Импульсный преобразователь перемещения | 1982 |
|
SU1049945A1 |
| Устройство для управления однофазным тиристорным инвертором | 1982 |
|
SU1089755A1 |
| Устройство для учета пассажиров | 1981 |
|
SU1035621A1 |
Устройство относится к автоматике и может быть использовано для дистанционного контроля перемещений объектов или счета импульсов. Цель изобретения - повышение достоверности устройства. Устройство позволяет правильно определить направление движения объектов при возвратно-поступательном движении в зоне действия датчиков. Изменяя время задержки элемента, можно регулировать максимальную скорость считвывания движущихся объектов. 2 ил. ел vl ел со
Редактор И.Шулла
Составитель М.Артамонов
Техред А .Кравчук Корректор Е.Рошко
Заказ 1457/50 Тираж 544Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретенир и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул, Проектная, 4
| Устройство для счета импульсов | 1980 |
|
SU902046A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для определения направления перемещения объектов | 1977 |
|
SU622143A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
