Ияобретеиие относится к области грузополтьемных устройств, в частности к подъеьтникам с механизмами подъема без гибких элементов, со стацио- нарньП Ш приводами подъема и жесткими 5 направляющими. Изобретение может быть использовано для подъема грузов на высоте до 60-80 м, в частности, дгтя подъема материалов и оборудования по восстающим выработкам на этажи очист- О нмх блоков шахт и рудников
Цель изобретения - повышение надежности.
На фиг. 1 представлен общий вид подъе8), а по продолыюй образующей поверхности оголовки секций 7 вьтолне- ны в виде четырехгранникоз, совмещаемых с небольпгим зазором с квадратным сечением полостей направляющих 1 и ползунов 5.
Ползуны 3 выполнены с цапфаки 12, на Которых с возможностью механизированного поворота (привод 13) закреплен рычаг 4, совмещенный в свою очередь с ветвями П-образной рамы 15 с возможностью механизированного перемещения (привод (6) последней пер- пег-щикулярно оси цапф 12 и плоскости
20
25
35
:мника-,на фиг.2 - вид по стрелке А фиг. 1 . - 15. Рама 15 выполнена с направляющими 7f в которых установлена выдвигаемая механизированно (привод условно не показан) консольная рама 18, оснащенная в свою очередь груэо- захватами 19 для клети-контейнера 20, Между направлягощимк 1 на почве вьфа ботки уложена рельсовая колея 21 для вагонеток или грузовых платформ 22«
В исходном положении для подъема рама 15 расположена s нижней части направляюших 1 за счет TorOj что через дапфы 12 опирается на одну сек- иЛ о 7, удерживаемую фиксаторами 9 в казвдой направляющей I ,
Остальные секции 7 в:азкдого лекта для направляющей установле ны в полостях-гнездах 6 ползуна 5, Штоки 1 1 подъемньтх цилиндров 8 находятся в нижнем положении, а над ни- ш-1 - ориентированная соосно полость- гнездо 6 с установленной в ней очередной секцией 7
Подьемник работает слёдз юшш обрезом. Клеть-контейнер 20, как унифицированный грузовой модуль транспортной системы шахты (рудника) на грузовой платформе 22, подается под восстающую выработку, оборудованную предлагаемым подьегФ5икэМз н устаяе1эли Я - атся под рамой 15,
Вклзочением привода 1 б pat-iy : 5 подвигают на клеть-контейнер 20 до обеспечения задействования грузозахватов 19 на консольной раме 18, Затем на пульте подъемника включают кнопку Подъем, Два подъемных цилиндра 8 синхронно начинают выдвижение своих штоков I15 которые через нижние цен- трнрующ1-1е отверстия полостей-гнезд 6 продвигаются до упора в нижний торец секции 7 и начинают поднимать икз вводя во внутреннюю полость направляющих i о Как Только секции 7 вопита
Основой подъемника являются коробчатого сечения вертикальные на- правляюп1з-1е 1 , закрепляемые на противоположных стенках восстающей выработки посредством анкеров. Направляющие 1 выполнены с продольным пазом 2 на всю их длину и вмещают гр узонесу- щие ползуны 3,
Под каждой направляющей 1 установлена горизонтальная направляющая 4, в которой с возможностью продольного перемещения посредством механизиро- BaHHqrOj реверсивного шагового приво™ да (условно не показан) размещен дополнительный ползун 5 с полостями- гнездами 6 для установки в вертикальном положении всего комплекта секцир 7 для соответствующей вертикальной направляющей 1.
Под каждой горизонтальной направляющей 4 в почве выработки установлен привод подъема секций выполненный в виде подъемного цилиндра 8j продольная ось которого совпадает с соответствующей осью внутренней полости направляющей 1 о Включение привода по времени работы сблокировано с шаговым приводом ползуна 5 (условно не показано), Ка нижних оконечностях направляющих 1 установлень фиксатс-ры
9,приводимые в действие цилиндрами
10,которые сблокирова15ы (условно не показаны) по очередности работы с цилиндрами 8« Секции 7 выполнены с элементами унифицированного совмещения; по торцам - друг с другом (плоскости перпендикулярные их продольной оси)S с фиксаторами 9 и с цилиндрами 8 (перпендикулярно продольной оси секций на их торцах вьтолнены сквозные пазы, для размещения запорных участков фиксаторов 9
и опорного торца штока I1 цилиндра
40
50
55
8), а по продолыюй образующей поверхности оголовки секций 7 вьтолне- ны в виде четырехгранникоз, совмещаемых с небольпгим зазором с квадратным сечением полостей направляющих 1 и ползунов 5.
Ползуны 3 выполнены с цапфаки 12, на Которых с возможностью механизированного поворота (привод 13) закреплен рычаг 4, совмещенный в свою очередь с ветвями П-образной рамы 15 с возможностью механизированного перемещения (привод (6) последней пер- пег-щикулярно оси цапф 12 и плоскости
в направляюише 1, посредством блокировки обеспечивается срабатьшание цилиндров 10, которые снимают фиксацию вышележащих секций 7, и последние начинают подниматься до окончания хо да циливдров 8 вверх. После окончания хода вверх срабатьгеают фиксаторы 9 на удержание по нижнему торцу выдвинутых секций 7. Затем шток II цилиндра 8 опускается вниз. Как только он занимает нижнее положение, шагово привод ползуна 5 перемещает последний на следующую полость-гнездо 6 с установленной в нем секцией 7. Циклы подъема клети-контейнера 20 на одну секцию 7 повторяются непрерьшно в автоматическом режиме, который прерывается оперативно нажатием кнопки Стоп на пульте подъемника от срабатывания концевого выключателя за- данного этажа или концевого выключателя крайнего положения ползуна 5 (условно не показаны). На определенном этаже остановки включением привода консольной рамы 8 выдвигают ее на приемную площадку этажа, снимают грузозахваты 19 с клети-контейне- ра 20, а затем возвращамт раму 18
Варианты конструктивного исполн ния подъемника ползун 5 автоматической подачи секций 7 для спуска подьема может быть вьтолнен в виде карусельной платформы, подъемным э ментом циипнндр а 8 может быть его корпус, клеть-контейнер 20 может иметь непосредственную подвеску на цапфах 12 и для фиксации от раскач вания может вьтолняться с вьщвнжны упорами, входящими в продольный па 2 направляюпа1Х 1, отдельные виды
в исходное положение. Спуск рамы 15
осуществляется после нажатия соответ-- оборудования могут непосредственно
ствующей кнопки на пульте подъекши-закрепляться грузозахватами 19 на
ка, при этом также в автоматическомконсольной раме 18.
режиме вьтолняется работа в обратном порядке.
В том случае, если необходимо поднять в клети-контейнере 20 длинномерный материал (трубы и элементы крепления), захват клети-контейнера 20 с грузовой платформой 22 осуществляю после предварительного вьщвижения консольной рамы 18, и подъем его на начальной траектории осуществляют с одновременным обратным -ходом рамы 18 и поворотом рычагов 4 до разворота рамы,5 на угол 90, при этом клеть-контейнер 20 оказывается ориентированной своим длинномером вдоль восстающей вьфаботки.
Варианты конструктивного исполне ния подъемника ползун 5 автоматической подачи секций 7 для спуска и подьема может быть вьтолнен в виде карусельной платформы, подъемным элементом циипнндр а 8 может быть его корпус, клеть-контейнер 20 может иметь непосредственную подвеску на цапфах 12 и для фиксации от раскачивания может вьтолняться с вьщвнжными упорами, входящими в продольный паз 2 направляюпа1Х 1, отдельные виды
15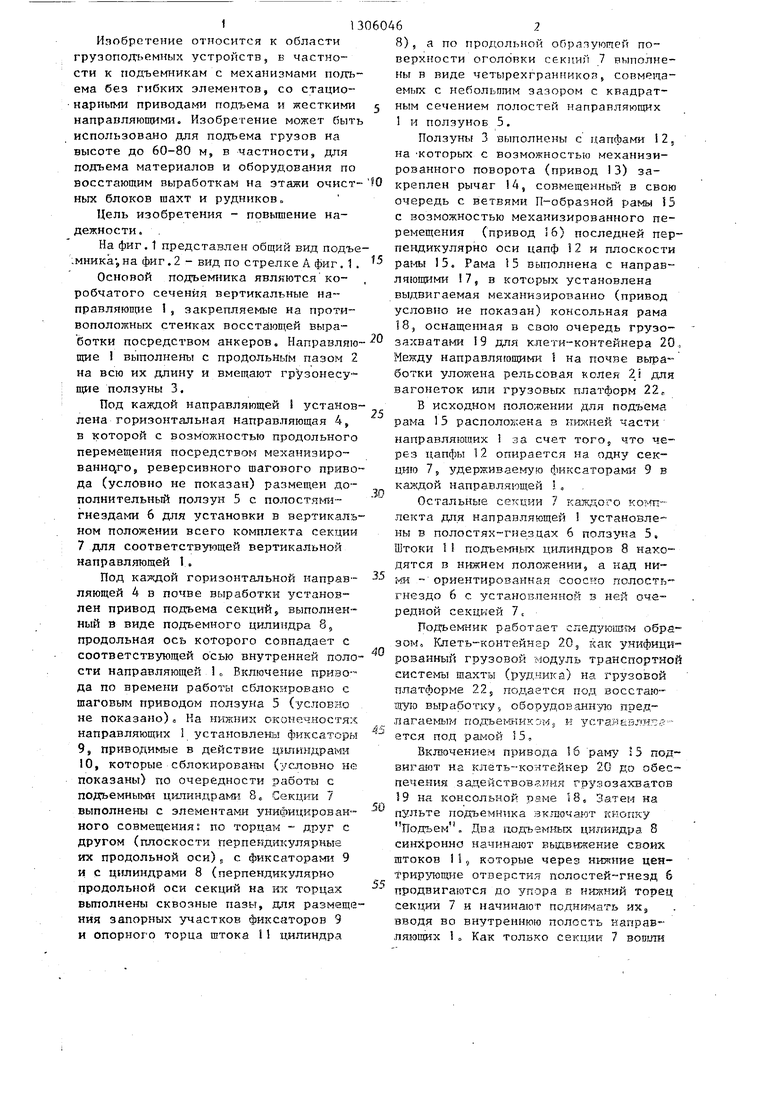

Составитель А, Мазнлкин Редактор Т. Куркова Техред А.Кравчук Корректор М. Демчик
Заказ 3395 . Тираж 691 Подписное
ВНШ ШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
ч
Произнодственно-полиграфическое предприятие, г Ужгород, ул. Проектная, 4
| Шаговый подъемник | 1983 |
|
SU1222626A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| ПОДЪЕМНЖ, содержащий сто- бчные секции, закрепленные на осно- вании горизонтальные направл5Ш дие для подачи секций к основным вертикальным направляющим с зазором, смонтированным над горизонтальными направляющими, грузонесущие ползуны , установленные в вертикальных напрев- ляющих и смонтированньй на основании привод подъема секций, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительными, установленными на горизонтальных направляющих, ползунами с дополнительными вертикальными направляющими для установки в них секций и фиксаторами положения секций относительно основных вертикальных направляющих, закрепленными в нижних частях последних, а привод подьема .секций смонтирован под основными вертикальными направляющими ниже уровня горизонтальных направляющих, 2.Подъемник по п | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ф | |||
