1
Изобретение относится к нодвесным и подъемно-транспортирующим устройствам, используемым преимущественно в однобалочных кранах, в частности в камнедобывающей и камнео-брабатывающей нромышленности при штабелировке вырезаиного камня за камнерезными машинами и ногрузке камней на транспортирующие средства.
Известно устройство для подъема и транспортировки грузов, содержащее балку консольното крана, на которой установлена тележка грузоподъемного механизма с телескопической гнаправляюЩей, включающей щарни.рно подвещенную па тросе траверсу, несущую грузозахватный орган, горизонтальную раму жесткости, на которой установлены катки опоры 1.
Недостатком устройства является то, что оно при употреблении его в камнеуборочных машинах, когда рабочему приходится вручную управлять устройством и удерживать его в «адл ежащем положении, осо-бенно в горных условиях.
Целью изобретения является повышение эффективности работы з-ттрой-ства.
Указанная цель достигается тем, что предлагаемое устройство снабжено дополнительной телескопической направляющей, при этом направляющие содержат гидроцилиндры, на нижних концах которых размещена рама жесткости.
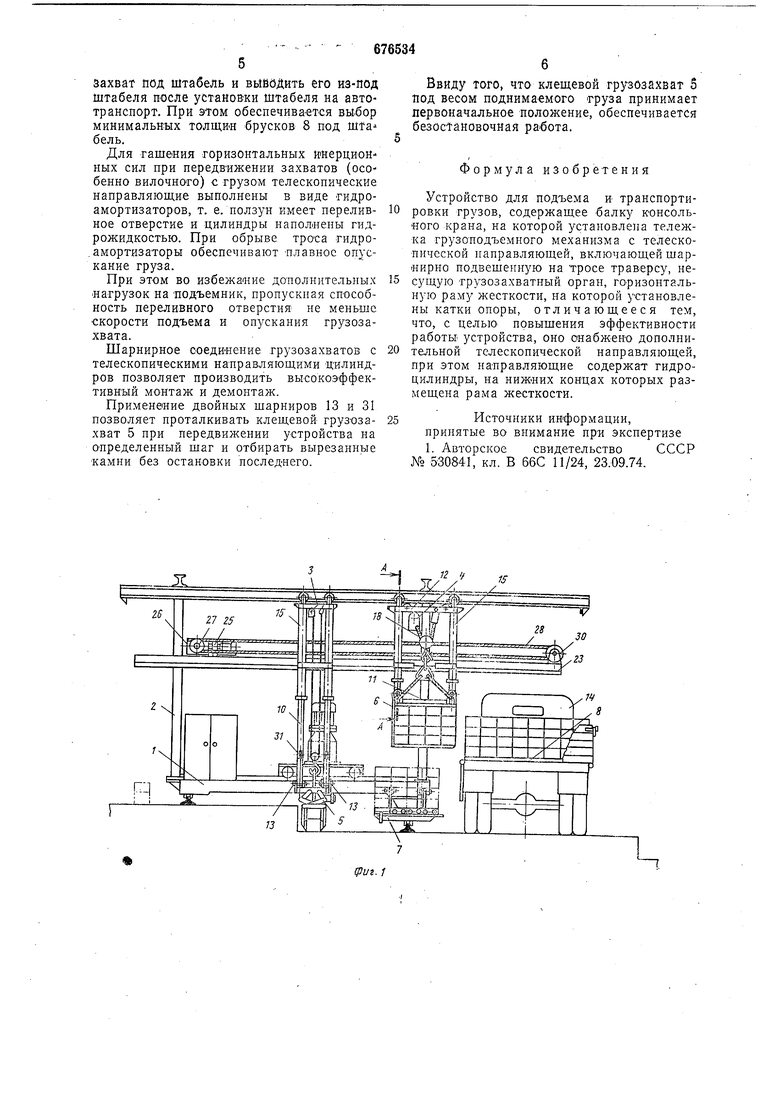
На фиг. 1 изображено предлагаемое устройство, вид; на фиг. 2 - то же, вид
-сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 4.
Устройство 1 для подъема и транспортировки грузов включает однобалочный копсольный кран 2 с подъемными механизмами 3 и 4, на которых подвешены клещевой 5 и вилочный 6 грузозахваты. Грузозахват 5 служит для отбора пакетов камней, из забоя и формирования штабеля на накопительной платформе 7, а грузозахват 6-для разгрузки накопительной платформы 7 на транспортирующее средство. Для обеспечения работы вилочного грузозахвата в начальных этапах механизации, а также соблюдения прогрессивного пакетного метода доставки штучных камней на всех этапах перегрззочных работ платформы снабжены брусками 8.
Грузозахваты подвещены при помощи четырехветвевых строп 9 под углом 60° и снабжены двумя негрузонесущими направляющими цилиндров 10 телескопического типа через траверсу 11 с проушинами (с обоих концов), смонтированную горизонтально к раме грузозахвата 6. Траверса 11
расположена по направлен.ию пер.едви кг«ия тележки, при этом захват связан с передвижйой тележкой 12 кра-на 2 при помощи шарнира 13.
Благодаря -перечисленным особенностям захват удерживается в необходимом положении как при отборе из забоя камня, формировании штабеля на накопительной платформе 7 и их расформировании с накопительных платформ, так и при погрузке штабеля с накопительной платформы 7 и погрузке на трагнспортируюшие средства 14 за устройствами.
Направляющие цилиндров 15 с ползу 1ами 16 въгполпепы в виде гидроамортизатора, т. е. цилиндр наполнен гидрожидкостыо, а ползун 16 имеет перелиБщое отверстие 17. Пропускная способность переливного отверстия 17 идентична скорости подъема и опускания подъемников-. Выпол«ение телескопических наиравляющих в Внде гидроамортизаторов обеспечивает работу, например, вилочного захвата со значительной грузоподъемностью под инерциОН1НЫМИ. силами при передвижении, к тому же при обрыве троса 18 обеспечивает плавное опускание груза.
. На нижних концах цилиндров 15 закреплена горизонтальная рама жесткости 19, которая взаимодействует с вертикальными колоннами 20 крана 2 при -помощи установленных на торцах рамы направляющих роликов 21 углового профиля -и подпорных роликов 22. При этом перемычки жесткости 23 вертикальных колонн 20 расположены по направлению передвижения этих роликов И1 снабжены- направляющим и 24 углового профиля. Этим обеспечивается устойчивое положен-ие грузозахватов от воздействия боковых раскачивающих инерционных сил при передвижении устройства, и от боковых ветровых нагрузо-к.
Для предотвращения;произвольного сбета от ветровых нагрззок и обеспечения четкой работы вилочно-го захвата привод пер-едвижен-ия захвата снабжен тяговой лебедкой, которая установлена «а перемычках жесткости 23, а последние закреплены ио оси асимметрии передвигаемой массы. Привод передвижения трузозахвата 6, включая тяговз-Ю лебедку, состоит из электродвигателя, электромагнитното ленточного тормоза 25, редуктора 26 с барабаном намотки 27, тягового тро-са 28, который прикреплен к торцу горизонтальной рамы жесткости 19 пр-и помощи зажима 29 и блока 30. Последний установлен на конце -перемычки жесткости 23, передвигаясь по которой тяговый трос перемещает вилочный захват.
Для предотв.ращения произвольнаго сбега клещевого грузозахвата 5 малой грузоподъемности горизонтальная рама жесткости 19 снабжена электромагнитным коло-дочным тормозом, взаимодействующим С перемычками жесткости 23.
С целью обеспечения бесперебойной работы предлагаемого устройства, а именно клещевого грузозахвата 5, телескопические направляющие выполнены с двойными шарнирами 13 и 31, расположенными перпендикулярно к направлению вырезки. Работает устройство следующим образом.
При отборе вырезанного кампя из забоя и их штабелировке на накопительной платформе 7 клещевым грузозахватом 5, а также при разгрузке штабелей камней с накопительной платформы вилочным грузозахватом 6 и погрузке на автотранспор-т захваты удерживаются в необходимом положении двумя -негрузонесуидими телескопическими направляющими цилиндров 15,
обеспеч-ивающими дистанционное высо-коэффективное управление-.
К тому же в момент подъема штабеля направляюшие разгружены, так как вес камней воспринимается подъемником. Это
позволяет телескопические направляющие изготовить из тонкостенных труб, что уменьшает -нагрузку действующего на консоли -балочного крана 2. При. передвижении камнерезной машины
по инерции, а также при боковых ветровых нагрузках при работе происходят неблагоприятные бобковые раскачивания грузозахватов 5 и 6. Для устранения этого явления в нижней части телескопических надравляюЩих 15 может быть смонтирована горизонтальная рама жесткости 19, которая соединена с вертикальными колоннами крана.
На торце горизонтальной рамы смонтированы ролики углового профиля и подпорный ролик 22. Пер-емычка жесткости колонн крана снабжена на-правляющими углового профиля, расположенными по направлению передвижения роликов 22. Такое за-цепление образует рукав, поддерживающ-ий устойчивое состояние грузозахватов 5 и 6 от раскачивающих боковых усикЛИЙ.
Для предотвращения произвольного сбе,га вилочного грузозахвата 6 под ветровыми нагрузками в горных зсловиях, а также при. изменении наклона -балки крана 2 вследствие неправильно разработанных уступов, где уклон уступа может превышать
допустимые нормы, пр-ивод передвижения захвата снабжен тяговой лебедкой с тормозным устройством.
Для устранения момента, действуюшего на вертикальные консоли захватов при их
П-ередвижении без груза, привод передвижения установлен по -траектории асимметрии передвигаемой массы и может быть соединен в нижней части направляющих цилиндров 15.
Это позволяет легко вводить вилочный
захват под штабель и выводить его из-под штабеля после установ:ки штабеля на автотранспорт. При ЭТом обеспечивается минимальных толщин брусков 8 под штабель.
Для гашения горизонтальных Инерционных сил при иередвижении захватов (особенно вилочного) с грузом телескопические направляюш;ие выполнены в виде гидроамортизаторов, т. е. ползун имеет переливное отверстие и цилиндры напол«ены гидрожидкостью. При обрыве троса гидро. амортизаторы обеспечивают -плавное опускание груза.
При этом во избежяние дополнительных нагрузок на подъемник, пропускная способность переливного отверстия не меньше скорости подъема и опускания грузозахвата.
Шарнирное соедивение грузозахватов с телескопическими направляющими щилиндров позволяет производить высокоэффективный монтаж и демонтаж.
Применение двойных шарниров 13 и 31 позволяет проталкивать клещевой грузозахват 5 при передвижении устройства на определенный щаг и отбирать вырезанньте камни без остановки последнего.
Ввиду ТОГО, что клешевой грузозахват 5 под весом поднимаемого груза принимает первоначальное положение, обеспечивается безостановочная .
Формула изобретения
Устройство для подъема и- транспортировки грузов, содержащее балку консольного крана, на которой установлена тележка грузоподъемного механизма с телескопической направляющей, включающей шар«ирно подвещенную на тросе траверсу, несущую грузозахватный орган, горизонтальную раму жесткости, на которой установлены катки опоры, отличающееся тем, что, с цельЮ повышения эффективности работЫ устройства, оно снабжено дополнительной телесконической направляющей, при этом направляющие содержат гндроцилиндры, на ниЖНих концах которых размещена рама жесткости.
Источники информации,
принятые во внимание прИ экснертизе 1 Авторское свидетельство СССР ДСо 530841, кл. В 66С 11/24, 23.09.74.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки блоков штучного камня | 1972 |
|
SU608941A1 |
| Устройство для погрузки пильногоКАМНя | 1978 |
|
SU831977A1 |
| Устройство для сближения штабеля | 1974 |
|
SU599076A1 |
| Высотный кран-штабелер | 1979 |
|
SU844518A1 |
| Стеллажный кран-штабелер | 1988 |
|
SU1643338A1 |
| ТЕПЛОСБЕРЕГАЮЩЕЕ УСТРОЙСТВО ДЛЯ ГРУЗОЗАХВАТА | 2016 |
|
RU2627223C1 |
| Кран-штабелер | 1980 |
|
SU908740A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1402512A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ЛЕГКИХ ПАНЕЛЕЙ | 1995 |
|
RU2152495C1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |

23 29
fSl
И
иlpui.3
5-е
В-8
28 30
30
Риг.Ь
