Устройство снабжено коромыслами 15 и 16 и рычагами 17 и 18, закрепленными на раме по обе стороны опорного гребня 13 тяговой балки 14, а также датчиками 33,34 и указателем 35 курсовой устойчивости тягача, причем рычаги 17,18 связаны с тормозными тягами 3,4 при помощи рычагов 23,24, тяг 21,22 и односторонних упоров 7,8, а коромысла 15,16 связаны с противо-. положными тормозными тягами 3,4 при помощи гибких тяг 27,28. При откло- - нении корпуса тягача от курса, например влево, ролик 20 упирается в опорный гребень 13 тяговой балки 14
Изобретение относится к тракторному и сельскохозяйственному машиностроению, преимущественно к гусеничным тягам с тяговой нагрузкой на крюке.
Цель изобретения - повышение удобства управления тягачом путем стабилизации прямолинейного движения
На чертеже представлена кинематическая схема устройства, для автоматической стабилизации прямолинейного движения тягача с тяговой нагрузкой на крюке.
Устройство содержит рычаги I и 2 управления, связанные тягами 3 и 4 с элементами управления планетарных механизмов поворота, выполненных в виде тормозных лент 5 и 6. На тягах 3 и 4 выполнены жесткие упоры 7 и 8 и продольные пазы 9,10,11 и 12 свободного хода.
Рядом с боковыми поверхностями опорного гребня 13 тяговой маятниковой балки 14 размещены коромь сла 15 и 16, шарнирно связанные с рычагами 17 и 18. Рычаги 17 и 18 шарнирно закреплены на корпусе тягача. На внутренних концах коромысел 15 и 16 установлены ролики 19 и 20, Передние концы рычагов 17 и 18 связань: тягами 21 и 22 и рычагами 23 и 24 с упорами 7.и 8.
Внешние концы коромысел 15 и 16 пружинами 25 и 26 связаны с передними концами рычагов 17 и 18 и гибкими тягами 27 и 28, проходящими в напи с помощью коромысла 16 отводит рычаг 18, тягу 22 и нижнее плечо рычага 23 влево, а верхнее плечо рычага 23 нажимает на упор 7 и перемещает тягу 3 назад, которая растормаживает шкив правого планетарного тормоза. Вращение правой гусеницы замедляется и корпус тягача возвращается к заданному направлению движения. Стрелка 36 указателя 35 курсовой устойчивости тягача позволяет контролировать величину отклонения машинно- тракторного агрегата от курса. 1 з.п ф-лы. 1 ил.
1равляющих оболочках 29 и 30, с тя- Гами 3 и 4 планетарных механизмов. .Цепи 31 и 32 ограничивают перемещение заднего конца тяговой балки 14 отно- сительно корпуса тягача. Кроме того, устройство снабжено датчиками 33 и 34, закрепленными на тягах 3 и 4, и указателем 35 курсовой устойчивости движения тягача с крюковой нагрузкой, снабженного стрелкой 36.
Устройство работает следующим образом при различных относительных положениях линий продольной оси 0-0 тягача и , проходящей по направлению горизонтгшьной силы тягового сопротивления.
1. Если рычаги 1 и 2 опущврш, а тягач движется прямолинейно с крюковой нагрузкой, то линия продольной оси тягача 0-0 и линия 0, проходящая по направлению горизонтальной оси тягового сопротивления F,p .маятниковой ткговой балки 14, лежат в одной продольной плоскости. В это время коромысла 15 и 16 располагаются под определенным углом d к боковой поверхности опорного гребня 13, который обеспечивается равновесием сил пружин 25 и 26 и гибких тяг 27 и 28. Кроме того, между боковыми поверхностями опорного гребня 3 и роликами 19 и 20 имеются зазоры а, обеспечивающие свободнь е горизонтальные угловые колебания корпуса тягача 5 и балки 14 относительно друг друга с допустимой амплитудой. В это время
0
5
0
датчики 33 и 34 не работают, а стрелка 36 указателя курсовой устойчивости 35 занимает вертикальное поло- жение в зоне Г,
2, При самостоятельном повороте корпуса тягача на небольшой угол, например, влево относительно вертикальной оси проходящей в зоне центра тяжести, продольная ось тягача 0-0 поворачивается в горизонтальной плоскости относительно линии горизонтальной силы тягового сопротивления. При этом ролик 20 упирается в опорный гребень 13 и с помощью коромысла 16 отводит рычаг 18, тягу 22 и нижнее плечо рычага 23 влево, а верхнее плечо рычага 23 нажимаё т на упор 7 и перемещает тягу 3 назад, которая освобождает тормозную ленту 3 шкива правого планетарного механизма поворота. Вращение правой гусеницы замедляется, и корпус ча возвращается к заданному направлению движения. Коромысло 16 при от- воде рычага 18 передает усилие через трос 28 на тягу 4, дозатягивая тормозную ленту 6 шкива левого планетарного механизма поворота Б этом случае перемещение тяги 3 небольшое и стрелка 36 указателя 35 курсовой устойчивости тягача отклоняется вправо в пределах зоны Г, а затем возвращается в вертикальное положе-. ние.
6.При управлении тягачом вручную, например плавном повороте направо, рычаг 1 оттягивают назад. Тяга 3, перемещаясь назад в пределах пазов 9 и 10 свободного хода, сначала с помощью гибкой тяги 27, проходящей в оболочке 29f поворачивает коромысло 15 и вьшодит ролик I9 из зоны максиг- мальных угловых перемещений корпуса тягача и тяговой балки 14 относительно друг друга, ограничиваемых цепями 31 и 32, а затем выключает тормозную ленту 5 шкива правого планетарного механизма поворота. Частота вращения
3. В случае самостоятельного пово-35 правой гусеницы снижается, тягач порота корпуса тягача влево относительно тяговой балки I4 под максимальньм углем, допускаемым цепью 31, устройство работает, как описано в п.2. Однако при этом тяга 3 перемещается назад на значительное расстояние и стрелка 36 указателя 35 курсовой устойчивости тягача находится в зоне II, что является сигналом для своет временного перехода на ручное управление
40
45
ворачивается направо.
После поворота и выравнивания линий 0-0 и коромысло 15 занимает исходное положение под действием равновесия сил пружины 25 и гибкой тяги 27.
При повороте в противоположную сторону устройство работает аналогично.
4. Если тягач движется прямолинейно, а тяговая балка 14 самостоятельно }сратковременно смещается на неболь- шой угол влево, то устройство на мгновение опускает правый планетарный тормоз, создавая силу тяги только на левой гусенице, и совмещает суммарную линию тяги трактора с направ- лением тяговой балки . Увода тягача вправо при кратковременном воздействии устройства на правый мег ханизм поворота не произойдет. Так
5
0
5
0
как левая гусеница не в состоянии быстро преодолеть кинетическую энер- гию прямолинейного движения тягача и создать момент, поворачивающий тягач вправо. При длительном отклонении направления силы от оси тягача управление агрегатом осуществляется вручную.
5.Если тягач движется прямолинейно, а тяговая балка 14 самостоятельно смещается влево относительно центра тяжести, угол, допускаемый цепью 31, то устройство работает, как описано
в п.27 Однако в этом случае тяга 3 перемещается назад на значительное расстояние и стрелка 36 указателя 35 курсовой устойчивости тягача находится в зоне II, что является сигналом для своевременного перехода на ручное управление.
6.При управлении тягачом вручную, например плавном повороте направо, рычаг 1 оттягивают назад. Тяга 3, перемещаясь назад в пределах пазов 9 и 10 свободного хода, сначала с помощью гибкой тяги 27, проходящей в оболочке 29f поворачивает коромысло 15 и вьшодит ролик I9 из зоны максиг- мальных угловых перемещений корпуса тягача и тяговой балки 14 относительно друг друга, ограничиваемых цепями 31 и 32, а затем выключает тормозную ленту 5 шкива правого планетарного механизма поворота. Частота вращения
5 правой гусеницы снижается, тягач по
ворачивается направо.
После поворота и выравнивания линий 0-0 и коромысло 15 занимает исходное положение под действием равновесия сил пружины 25 и гибкой тяги 27.
При повороте в противоположную сторону устройство работает аналогично.
Формула изобретения
Устройство для автоматической стабилизации прямолинейного движения тягача с тяговой нагрузкой на крюке, содержащее бортовые механизмы поворота с элементами управления, связанными тягами с рычагами управления, тяговую маятниковую балку, шарнирно связанную с корпусом тягача, отличающееся тем, что, с целью овышения удобства управления тягачом
5 . 13067956
путем стабилизации прямолинейного пусе тягача , а другие концы посредст- движения, оно снабжено опорным греб- вом тяг кинематически связаны с эле- нем, установленным в средней части ментами управления бортовыми механиз- тяговой маятниковой балки, коромыс- мами поворота, пружинами и гибкими
лами, размещенными по обе стороны тягами, причем другие плечи коромы- опорного гребня, при этом на одних сел связаны посредством пружин с плечах коромысел установлены ролики упомянутыми рычагами и посредством с возможностью взаимодействия с опор- гибких тяг - с соответствующими эле- ным гребнем, рычагами, одни концы ментами управления бортовыми мехакоторых шарнирно закреплены на кор-Ю низмами поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| Система поворота шарнирно-сочлененной гусеничной машины | 1985 |
|
SU1257009A1 |
| ТРАКТОРНЫЙ АГРЕГАТ | 2004 |
|
RU2259030C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2011559C1 |
| Стабилизирующее буксирное устройство одноосного прицепа с регулируемым наклоном шкворня | 2021 |
|
RU2771088C1 |
| Устройство для управления колесами полуприцепа транспортного средства | 1983 |
|
SU1105360A1 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 1991 |
|
RU2046619C1 |
Изобретение относится к транспортному и сельскохозяйственному ма- ,никоетроению. Цель изобретения - повышение удобства, управления путем стабилизации прямолинейного движения. 16 СО О О5 ;о йл 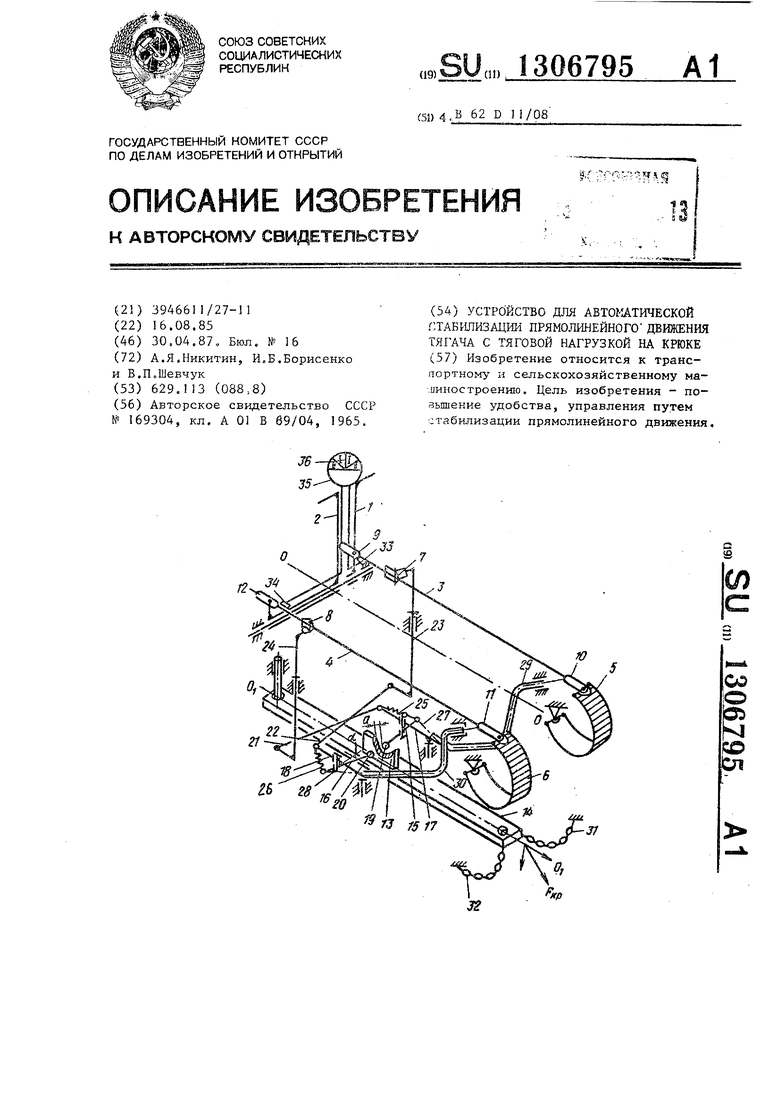
| 0 |
|
SU169304A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
