1
1Гзобретение относится к землерой Hbw машинам, а именно к рабочим органам для рыхления мерзлых и прочны грунтов, и может быть использовано при разработке траншей и нарезании щелей.
Целью изобретения является повышение надежности работы путем повышения коэффициента перекрытия и сни .жения динамических нагрузок.
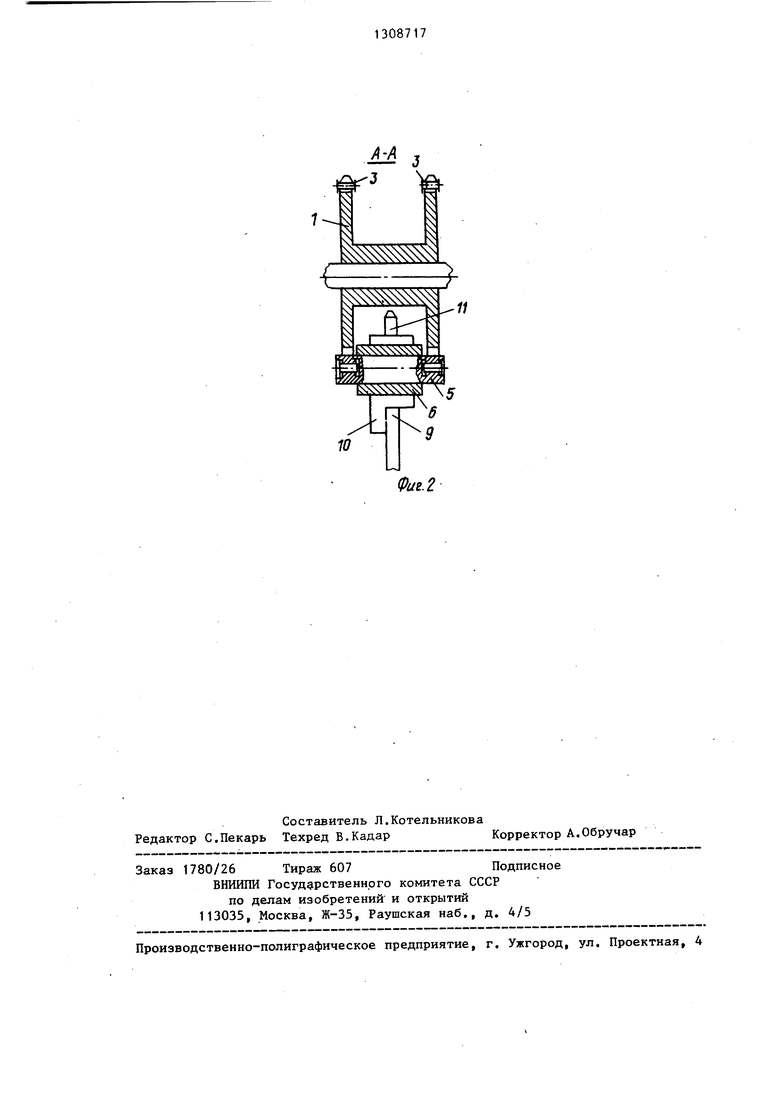
На фиг. 1 изображен рабочий орга в рабочем положении, общий вид} на фиг. 2 - сечение А-А на фиг. 1.
Рабочий орган содержит привод, состоящий из двух пар. звездочек, установленных на ведущих 1 и ведомых осях с радиусами по делительной окружности, 1
На звездочках 1 и 2 установлены
цепи 3 с роликовыми захвата;ми 4,которые состоят из оси 5 и ролика. 6.
Расстояние от горизонтальной прямой, соединяющей оси звездочек до гризонтальной оси фрезы определяется по следующей зависимости:
1 R.COS
K-tp9
2
+ В, при 1 К$2,
где R - радиус делительной окружности фрезы
t рд - шаг установки режущих элементов j В - радиус делительной окружност
звездочки.
Приводные звездочки имеют карманы 7 и установлены на раме 8, на которой также закреплена дисковая фреза 9 с резцедержателями 10 и режзгщими элементами 11, которые установлены с шагом tpj. Рама 8 имеет кронштейн 12, который поворачивается вместе с рамой относительно выходного вала редуктора 13 при помощи гидроцилиндра 14, Редуктор 13 установлен на базовой машине 15, Вращение звездочек i и 2 осуществляется от редуктора 13 при помощи цепной передачи 16„ Карманы 7 в приводных звездочках 1 и 2 выполнены для пропуска осей, при необходимости можно выполнить с возможностью контакта с осями 5,
Благодаря увеличению количества взаимодействующих роликовых захватов с режущими элементами, а также симметричному расположению относительно цепи роликовых захватов повьштается КПД привода за счет повышения коэффициента перекрытия, а усилия от сил
5
5
резания распределяются по двум или трем роликовым захватам, что приводит к значительному повышению надежности за счет уменьшения напряжений в элементах привода. Повышается срок службы цепи в приводе за счет описанного расположения роликовых захватов.
Рабочий орган работает следующим образом.
От вала отбора мощности базовой машины 15 движение через редуктор 13 и цепную передачух1б передается на ведущую и ведомую звездочки 1 и 2. Цепь 3, двигаясь, захватьшает роликовыми захватами 4 резцедержатели 10 и приводит в движение дисковую фрезу 9. Гидроцилиндр 14, действуя на кронштейн 12, опускает раму 8 вместе с фрезой 9 в рабочее положение, при этом происходит заглубление, фрезы в грунт. Режущими элементами 11 грунт разрушается и резцедержателями 10 выносится на поверхность. После заглубления базовой машине 15 придается движение вперед и происходит нарезание траншей-щелей.
Формула изобретения
Рабочий орган для нарезания щелей, включающий фрезу с режущими элементами, привод с. двумя парами установленных на осях звездочек, связанных между собой расположенными в горизонтальной плоскости цепями, роликовые захваты, расположенные с шагом, равным шагу установки режущих элементов, и взаимодействующие с последними, о т- личающийся тем, что,. с целью повъшения надел;ности работы путем повьш1ения коэффициента перекрытия и снижения динамических нагрузок, расстояние от горизонтальной прямой, соединяющей оси звездЪ- чек до горизонтальной оси фрезы, определяется по следующей зависимости
R.cos , при , где R РЭрадиус делительной окружности фрезы;
шаг установки режущих элементов-,
В - радиус делительной окружности звездочки,
а роликовые захваты установлены на
каждой из цепей.
10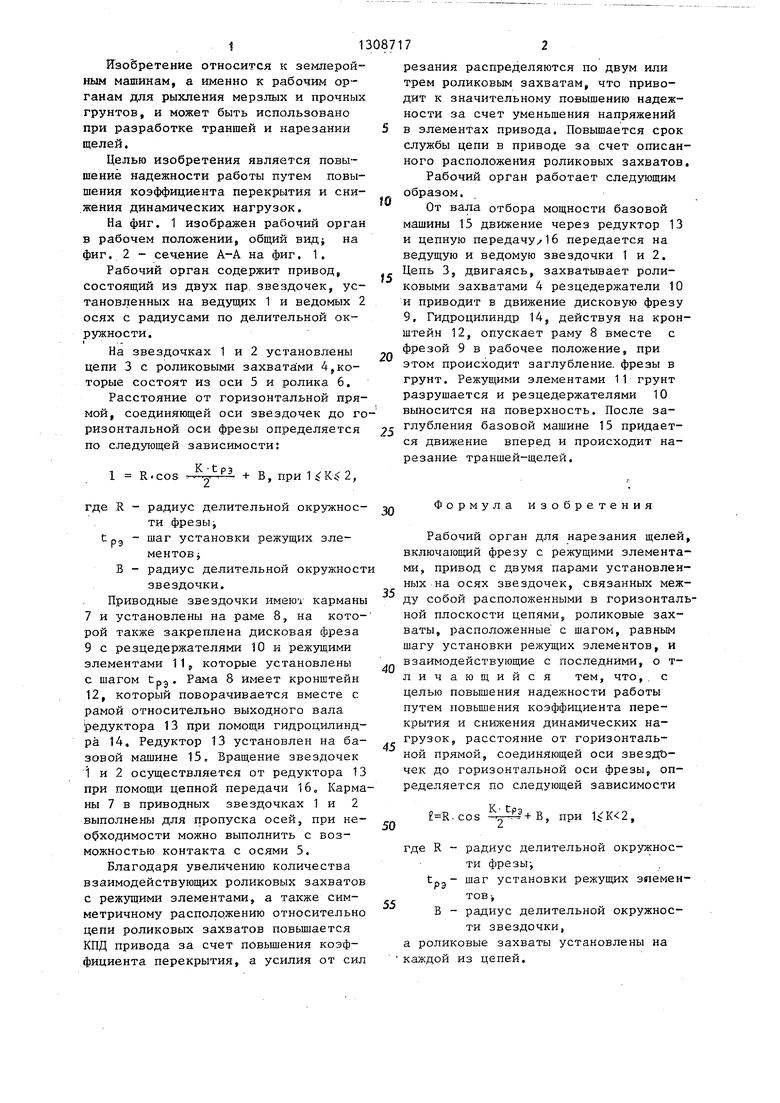
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭВОЛЬВЕНТНЫХ ЗВЕЗДОЧЕК | 1997 |
|
RU2110374C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭВОЛЬВЕНТНЫХ ЗВЕЗДОЧЕК ДЛЯ ЗУБЧАТЫХ ЦЕПЕЙ | 2006 |
|
RU2314900C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭВОЛЬВЕНТНЫХ ЗВЕЗДОЧЕК | 2003 |
|
RU2243068C1 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| Рабочий орган землеройной машины | 1987 |
|
SU1550048A1 |
| МАШИНА ДЛЯ УБОРКИ КОРНЕЙ РАСТЕНИЙ | 2007 |
|
RU2332829C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ДЕРНИНЫ, СТЕРНИ И НЕТОВАРНЫХ ЧАСТЕЙ С КОРНЕЙ В СОЛОДКОВЫХ АССОЦИАЦИЯХ | 2000 |
|
RU2179790C2 |
| УСТРОЙСТВО ДЛЯ ВЫКОПКИ ЛАКРИЧНОГО КОРНЯ | 1998 |
|
RU2127506C1 |
| Механизм подачи канатно-цепной пилы | 1979 |
|
SU859632A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1995 |
|
RU2085664C1 |
Изобретение относится к землеройным машинам и повышает надежность работы путем повышения коэффициента перекрытия и снижения динамических нагрузок. Для этого на каждой цепи 3, связывающей каждую пару ведущей 1 и ведомой 2 звездочек, установлены роликовые захваты 4. Шаг их установки равен шагу установки режущих элементов (РЭ) 11 на фрезе 9. Расстояние от горизонтальной прямой, соединяющей оси звездочек 1 и 2, до горизонтальной оси фрезы 9 определяется по следующей зависимости 1 R-COS K-tp5/2+B, где R - радиус делительной окружности фрезы 9; tpj- шаг установки РЭ 11; В - радиус делительной окружности звездочки. При вращении звездочек 1 и 2 цепи 3 захватывают роликовыми захватами 4 резцедержатели 10 РЭ 11 и приводят в движение дисковую фрезу 9. Благодаря симметричному расположению и увеличению количества взаимодействующих роликовых захватов 4 резцедержателями 10 РЭ 11 повьш1ается КПД привода, т.к. повышается коэффициент перекрытия. Это обеспечивает надежность за счет уменьшения напряжений- в элемен- ; тах привода. 2 ил. а S (Л с IV со о 00 
| Рабочее оборудование роторного экскаватора | 1982 |
|
SU1040060A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
