Изоб{эетение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Цель изобретения - повышение производительности и надежности электромеханического оборудования механизма поворота.
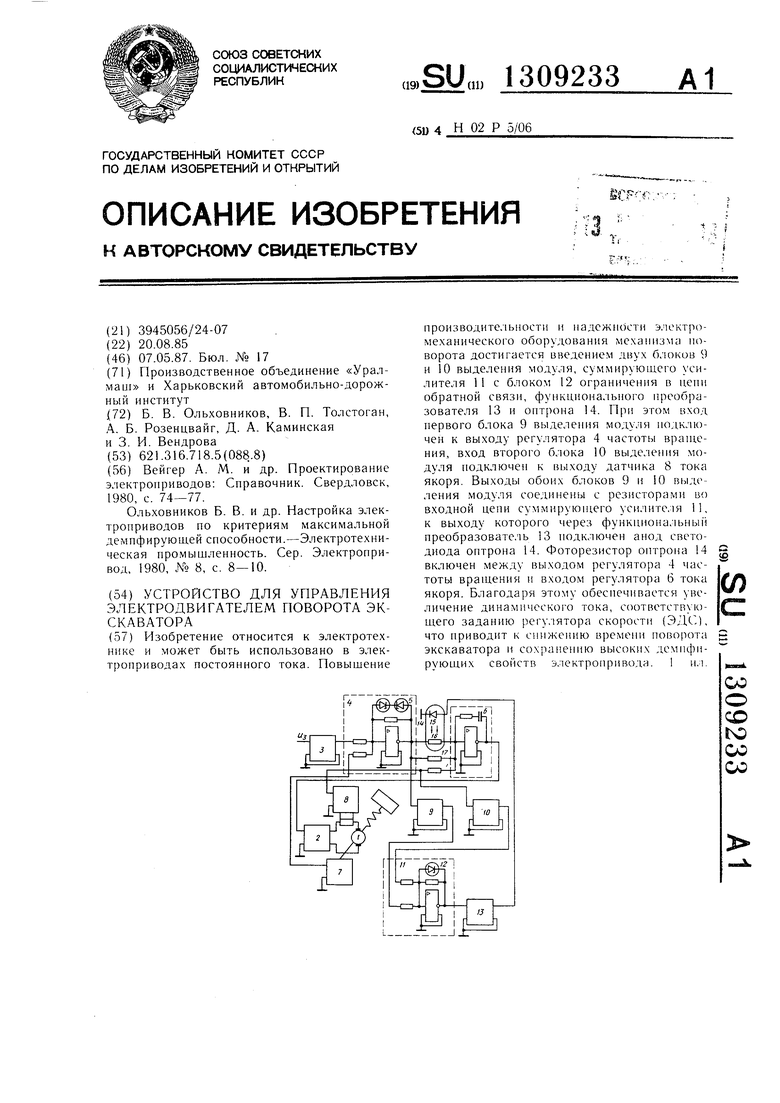
На чертеже приведена схема устройства.
Устройство для управления электроприводом поворота экскаватора содержит электродвигатель 1 постоянного тока,
подключенный к выходу преобразова- Ю якоря /д
участке своей характеристики, наступает установившийся режим работы механизма поворота с заданной частотой вращения электродвигателя. На вход суммируюшего усилителя 11 поступает разность модуля сигнала с выхода регулятора 4 частоты вра- шения, который пропорционален установке регулятора тока /о, и модуля сигнала с выхода датчика 8 тока якоря, который пропорционален динамической составляющей тока
теля 2 и последовательно . соединенные блок 3 задания, регулятор 4 частоты вращения с блоком 5 ограничения в цепи обратной связи и пропорционально- интегральный регулятор 6 тока, выход кото- .с ное значение. При эток ток в фоторезис- рого подключен к входу преобразователя 2, торе 16 весьма мал и не влияет, практи- датчики частоты 7 вращения и тока 8,чески, на работу устройства,
подключенные к соответствующим входам реВ процессе разгона (либо торможения) механизма поворота ток /д меньше тока /о .
ды которых подключены к выходам соответ- 20 Поэтому на выходе усилителя 11 появляет- ственно регулятора 4 частоты вращения ися сигнал, пропорциональный разности
датчика 8 тока, последовательно соединен-абсолютных значений токов /о и /д Этот
ные суммирующий усилитель 11 с блоком 12сигнал через функциональный преобразоваПри равенстве токов /о и /д сигнал на выходе усилителя 11 равен нулю, ток свето- диода 15 также равен нулю и сопротивление фоторезистора 16 имеет максимальгуляторов частоты вращения 4 и тока 6, два блока 9 и 10 выделения модуля, вхоограничения в цепи обратной связи, функциональный преобразователь 13 и оптрон 14, светодиод 15 которого подключен к выходу функционального преобразователя 13, а фоторезистор 16 подключен параллельно входному резистору 17 регулятора 6 тока и связан с выходом регулятора 4 частоты вра- ц|ения, выходы блоков 9 и 10 выделения модуля подключены к входам суммирующего усилителя 11, который совместно с функциональным преобразователем 13 и оптроном реализует следующую функциональную за25
30
тель 13 подается на светодиод 15 оптро- на 14 и сопротивление фоторезистора 16 изменяется в функции тока, протекающего через светодиод 15.
Характеристики функционального преобразователя 13 и оптрона 14 обеспечивают изменение сопротивления фоторезистора в области реальных значений разности токов.
А/ 1/о1
(2)
по закону
висимость:
«„,... -/iL,
где -сопротивление фоторезистора 16; - минимальное значение сопротивления фоторезистора, соответствующее максимальному значению
ПАп
7 / / Т J
/и
35- - .
где Кш,„ - минимальное значение сопротивления фоторезистора 16.
Через сопротивление фоторезистора с выхода регулятора частоты вращения на
сигнала на выходе фу нкциональ- 40 выход регулятора 6 тока якоря поступает ного преобразователя 13.дополнительная составляющая тока
Lie
/ф||
W
(4)
Устройство работает следующим образом. В начале процесса разгона (или торможения) на выход задающего устройства 3 поступает напряжение, которое определяет величина которой согласно уравнению (3), заданную установившуюся частоту вращенияпропорциональна разности токов /о-/.I,T. е.
пропорциональна ошибке регулирования при
постоянном напряжении регулятора частоты вращения UQ.
механизма. При этом на выходе регулятора 4 частоты вращения устанавливается максимальное неизменное напряжение Uo, которое ограничивается нелинейным элеменПри протекании тока /ФР через сопротивтом 5 в цепи его обратной связи. Это со фоторезистора 16 динамическая со- напряжение служит уставкой регулятора 6 ставляющая тока якоря /л озрастает и определяется зависимостью
тока и
/ Uo
v Ддт
;i:
I I в Ж т;-
(5)
где /Сдт - коэффициент передачи датчика 8 тока.
В конце процесса разгона регулятор частоты вращения выходит из режима ограничения и начинает работать на линейном
якоря /д
участке своей характеристики, наступает установившийся режим работы механизма поворота с заданной частотой вращения электродвигателя. На вход суммируюшего усилителя 11 поступает разность модуля сигнала с выхода регулятора 4 частоты вра- шения, который пропорционален установке регулятора тока /о, и модуля сигнала с выхода датчика 8 тока якоря, который пропорционален динамической составляющей тока
якоря /д
ное значение. При эток ток в фоторезис- торе 16 весьма мал и не влияет, практи- чески, на работу устройства,
При равенстве токов /о и /д сигнал на выходе усилителя 11 равен нулю, ток свето- диода 15 также равен нулю и сопротивление фоторезистора 16 имеет максимальсигнал через функциональный преобразова
тель 13 подается на светодиод 15 оптро- на 14 и сопротивление фоторезистора 16 изменяется в функции тока, протекающего через светодиод 15.
Характеристики функционального преобразователя 13 и оптрона 14 обеспечивают изменение сопротивления фоторезистора в области реальных значений разности токов.
А/ 1/о1
(2)
закону
ПАп
7 / / Т J
/и
- - .
Lie
/ф||
W
(4)
орой согласно ур ьна разности токо
тоянном напряжении регулятора частоты щения UQ.
При протекании тока /ФР через сопротив фоторезистора 16 динамическая со- вляющая тока якоря /л озрастает и опреяется зависимостью
I I в Ж т;-
(5)
55 где Го - эквивалентная постоянная времени
контура тока;
0 - электромеханическая постоянная времени привода;
р .f/--- ; (6)
K-fp
-сопротивление между выходом регулятора 4 частоты вращения и входом регулятора 6 тока при отклю- ценном сопротивлении RФP
Коэффициент р показывает, во сколько раз уменьшается эквивалентное сопротивление участка схемы между выходом регуля- тора частоты вращения и входом регулятора 6 тока при подключении в схеме сопротивления
Как видно из уравнений (5) и (6), по мере уменьшения сопротивления , т. е. увеличения коэффициента р, динамическая составляющая тока /д якоря возрастает и все более приближается к установке регулятора тока /о. Следовательно, соответствующим выбором значения коэффициента р обес- печивается необходимое увеличение тока /л и приближение его с заданной степенью точности к уставке регулятора тока /о.
Благодаря этому темп разгона и торможения возрастает, т. е. увеличивается производительность.
Постоянную времени Тп контура тока в предлагаемом устройстве можно принимать равной оптимальному значению, при кото- ром имеет место наиболее эффективное демпфирование механических колебаний, поскольку снижение темпа разгона (торможения), обусловленное увеличением постоянной времени Го контура тока, может быть скомпенсировано соответствующим увеличением коэффициента р. Увеличение эффективности демпфирования механических колебаний обеспечивает повыщение надежности электромеханического оборудования механизма поворота.
0
5
5
о 5
Формула изобретения Устройство для управления электродвигателем поворота экскаватора, содержащее электродвигатель постоянного тока, подключенный к преобразователю и последовательно соединенные блок задания, регулятор частоты вращения с блоком ограничения в цепи обратной связи и пропорционально-интегральный регулятор тока, выход которого подключен к входу преобразователя, датчики частоты вращения и тока, выходы которых соединены с соответствующими входами регулятора частоты вращения и регулятора тока, отличающееся тем, что, с целью повышения производительности и надежности электромеханического оборудования механизма поворота, в него введены два блока выделения модуля, входы которых подключены к выходам соответственно регулятора частоты вращения и датчика тока, последовательно соединенные суммирующий усилитель с блоком ограничения в цепи обратной связи, функциональный преобразователь и оптрон, светодиод которого подключен к выходу функционального преобразователя, а фоторезистор подключен параллельно входному резистору регулятора тока и связан с выходом регулятора частоты вращения, выходы блоков выделения модуля подключены к входам суммирующего усилителя, который совместно с функциональным преобразователем и оптроном реализует следующую функциональную зависимость:
/1«L 7л/-/7/
- сопротивление фоторезистора;
-, минимальное значение сопротивления фоторезистора, соответствующее максимальному значению сигнала на выходе функционального преобразователя;
|/о| - модуль уставки регулятора тока;
|/д| - модуль тока электродвигателя.
,р R

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1991 |
|
RU2056699C1 |
| Устройство для измерения крутящего момента на валу электродвигателя | 1991 |
|
SU1793281A1 |
| Устройство для тепловой защиты электродвигателя | 1981 |
|
SU1083282A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1994 |
|
RU2143778C1 |
| Электропривод постоянного тока | 1981 |
|
SU989723A1 |
| Электропривод постоянного тока | 1987 |
|
SU1446686A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Вейгер А | |||
| М | |||
| и др | |||
| Проектирование электронриводов: Справочник | |||
| Свердловск, 1980, с | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Ольховников Б | |||
| В | |||
| и др | |||
| Настройка электроприводов по критериям максимальной демпфирующей способности.-Электротехническая промышленность | |||
| Сер | |||
| Электропривод, 1980, Л 8, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
