Изобретение относится к устройствам для наружного крепления и направления питающих проводов перемещающихся инструментов манипулятора, к которым должны подводиться энергия, ток, ох.паж,цающая и рабочая среды и т.п. (питание осуществляется по нескольким проводам, которые могут быть выполнены в качестве линий тока шлангов, напорных труб и т.п.).
Целью изобретения является пов ы- щение надежности работы устройства при любом пространственном перемещении инструментов манипулятора.
На фиг.1 изображен манип лятор с соответствующими питающими проводами, общий вид; на фиг.2 - польй цилиндрический корпус для приема пучка проводов, продольный разрез; на фиг.З - зажатая полым цилиндрическим корпу- сом цилиндрическая вставка, вид сбоку на фиг.Д - разрез А-А на фиг.З; на фиг.З - расположенный на упругом элементе поль|й цилиндрический корпус, вид сбоку; на фиг.6 - сборная цилиндрическая вставка, вид сбоку; на фиг . 7 то же, вариант выполнения; на фиг.8 - разрез Б-Б на фиг.7; на фиг.9 - полый цилиндрический корпус с цилиндрической вставкой, продольный разрез; на фиг.10 - сечение В-В на фиг.9; на фиг.11 - державка с цилиндрической вставкой по фиг.9 и Ю продоль- ньш разрез; на фиг.12 - сечение Г-Г на фиг.11; на фиг.13- цилиндричес- кал вставка по фиг.6, вид сбоку.
Манипулятор 1 имеет различные, выполненные с возможностью перемещения друг относительно друга звенья(узлы)
Манипулятор состоит из неподвижно- то основания 2, установленного на нем звена (карусели) 3, выполненного с возможностью вращения вокруг вертикальной оси 4, установленного на звене (карусели) 3 звена (кулисы) 5, вы- полненного с возможностью вращения вокруг горизонтальной оси 6, проходящей через звено (стрелу) 7, выполненное с возможностью поворота вокруг горизонтальной оси 8, и щарнирно ус- тановленного на конце звена (стрелы) 7 звена (руки) 9. На звене 9 установлен рабочий орган 10, например сварочньй инструмент. Кроме того, на звене (pyjce) 9 можно также размещать режущий инструмент, распылитель, грейфер с винтовертом, сверлильное- приспособление и т.п. Звено (рука)
5
5 О
0 35
0
9 может вращаться вокруг продольной оси 1 и поворачиваться вокруг оси 12, проходящей поперёк оси 11. Сварочный инструмент 10 расположен с возможностью вращения относительно звена 9 вокруг оси 13. В зависимости от вида рабочего органа 10 можно предусматривать еще дальнейщие возможности движения.
Для сварочного инструмента 10 необходимы подача энергии и различные средства для его эксплуатации. При этом в первую очередь речь идет об электротоке, охлаждающей и рабочей среде и т.п. Если инструмент 10 обладает самостоятельной подвижностью и соответствующими приводами, то и их необходимо питать. Если вместо сварочного инструмента используют другие инструменты, то необходимая энергия и средства для их эксплуатации соответственно изменяются. Подача энергии к инструменту 10 осуществляется через пучок 14 питающих проводов, который снаружи установлен на манипуляторе 1. Такое расположение пучка 14 позволяет осуществлять самые различные движения звеньев 3, 5, 7 и 9. Поэтому пучок 14 установлен в державках 15 и размещен с образованием петель 16 между державками 15. Эти петли 16 обеспечивают возможность следования пучка 14 за отдельными движениями узлов.
Державки 15 установлены на узлах с возможностью вращения в зоне осей манипулятора,. В примере выполнения по фиг.1 державки 15 расположены на находящихся в относительно неподвижном состоянии частях звена 3, звеньев 5 и 9 так, что их ось вращения совпадает с осями 12, 8 и 6 манипулятора. В зависимости от конкретного выполнения других манипуляторов державки могут быть также расположены на расстоянии от указанных осей.
Если инструмент 10 должен перемещаться из изображенного на фиг.I положения вертикально вверх, то звено 7 вращается вокруг оси 8 относительно звена 5. Этим движением также следуют петли 16, перемещаясь вдоль звеньев 7 и 9. При этом длина петель 16 не изменяется, только державки 15 немного вращаются и обеспечивают таким образом то, что предотвращается изгиб пучка 14 проводов, и вместо этого он перемещается по благоприятНОИ относительно нагрузок линии другого спектра вдоль звеньев 3, 5, 7 и 9 манипулятора.
Кроме того, благодаря петлям 16 звено 9 может вращатьхгя вокруг оси 11 и пучок 14 проводов может следовать за этим вращательным движением. Если державки 15 по возможности близко расположены к осям 4, 11 и 13, то уменьшается путь поворота державки при вращении вокруг этих осей и, таким образом, петли 16 могут быть выполнены более короткими. У звена (карусели) 3 пучок 14 приводов также подводят снаружи в виде петли, позволяющей вьшолнять вращательное движение .
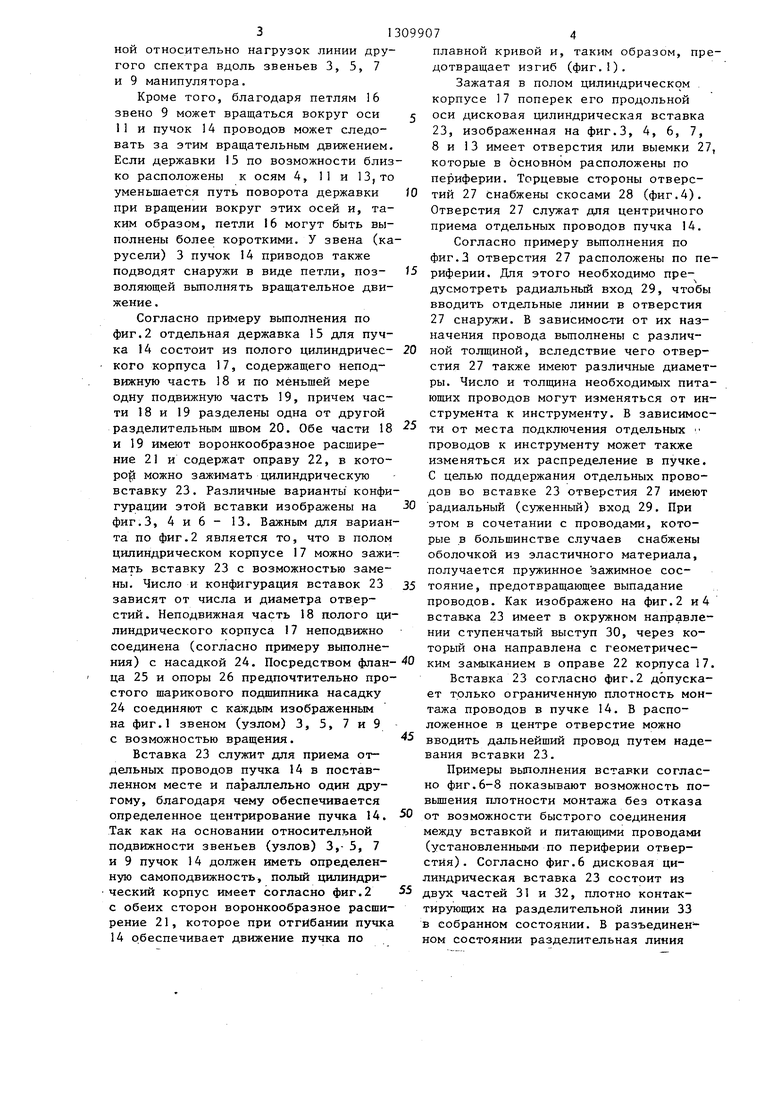
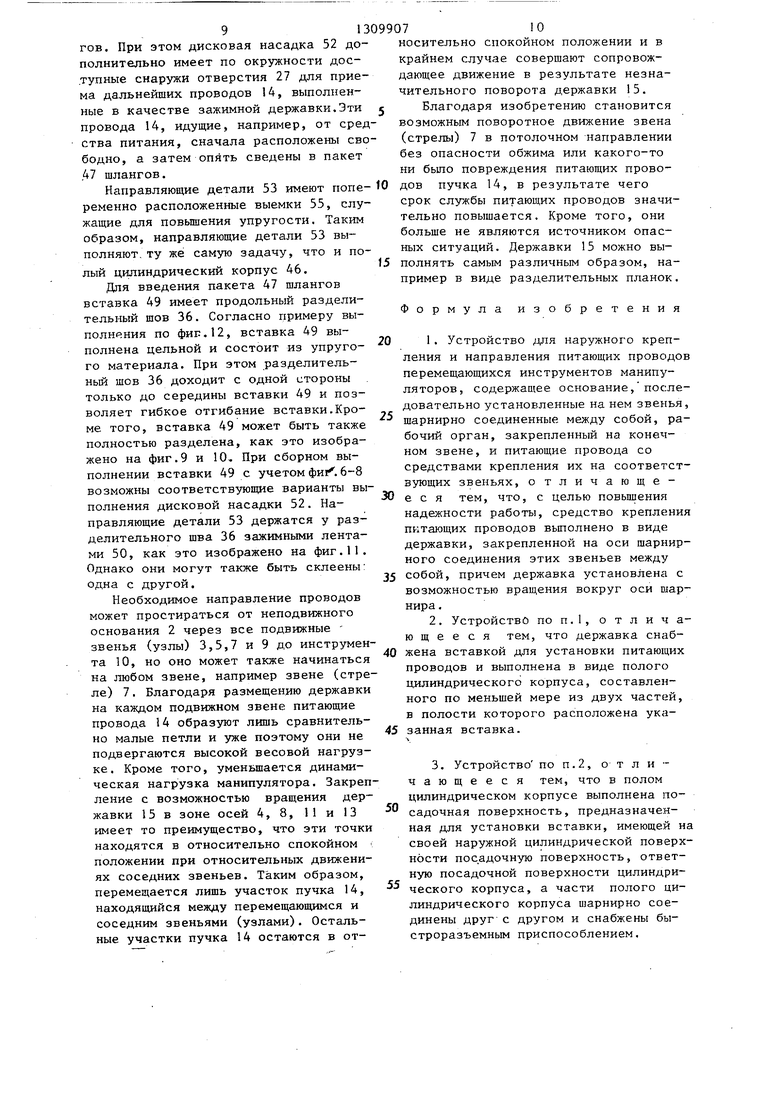
Согласно примеру выполнения по фиг.2 отдельная державка 15 для пучка 14 состоит из полого цилиндрического корпуса 17, содержащего неподвижную часть 18 и по меньшей мере одну подвижную часть 19, причем части 18 и 19 разделены одна от другой разделительным щвом 20. Обе части 18 и 19 имеют воронкообразное расширение 21 и содержат оправу 22, в кото- ро можно зажимать цилиндрическую вставку 23. Различные варианты конфигурации этой вставки изображены на -30 радиальный (суженный) вход 29. При
фиг.З, 4 и 6 - 13. Важным для варианта по фиг.2 является то, что в полом цилиндрическом корпусе 17 можно зажи мать вставку 23 с возможностью замены. Число и конфигурация вставок 23 35 зависят от числа и диаметра отверстий . Неподвижная часть 18 полого цилиндрического корпуса 17 неподвижно соединена (согласно примеру выполнения) с насадкой 24. Посредством флан- О ким замыканием в оправе 22 корпуса 17.
ца 25 и опоры 26 предпочтительно простого шарикового подшипника насадку 24 соединяют с каждым изображенным на фиг.1 звеном (узлом) 3, 5, 7 и 9 с возможностью вращения.
Вставка 23 служит для приема отдельных проводов пучка 14 в поставленном месте и параллельно один другому, благодаря чему обеспечивается определенное центрирование пучка 14. Так как на основании относительной подвижности звеньев (узлов) 3,- 5, 7 и 9 пучок 14 должен иметь определенную самоподвижность, полый цилиндрический корпус имеет согласно фиг.2 с обеих сторон воронкообразное расширение 21, которое при отгибании пучка 14 обеспечивает движение пучка по
O
5
0
5
плавной кривой и, таким образом, предотвращает изгиб (фиг.).
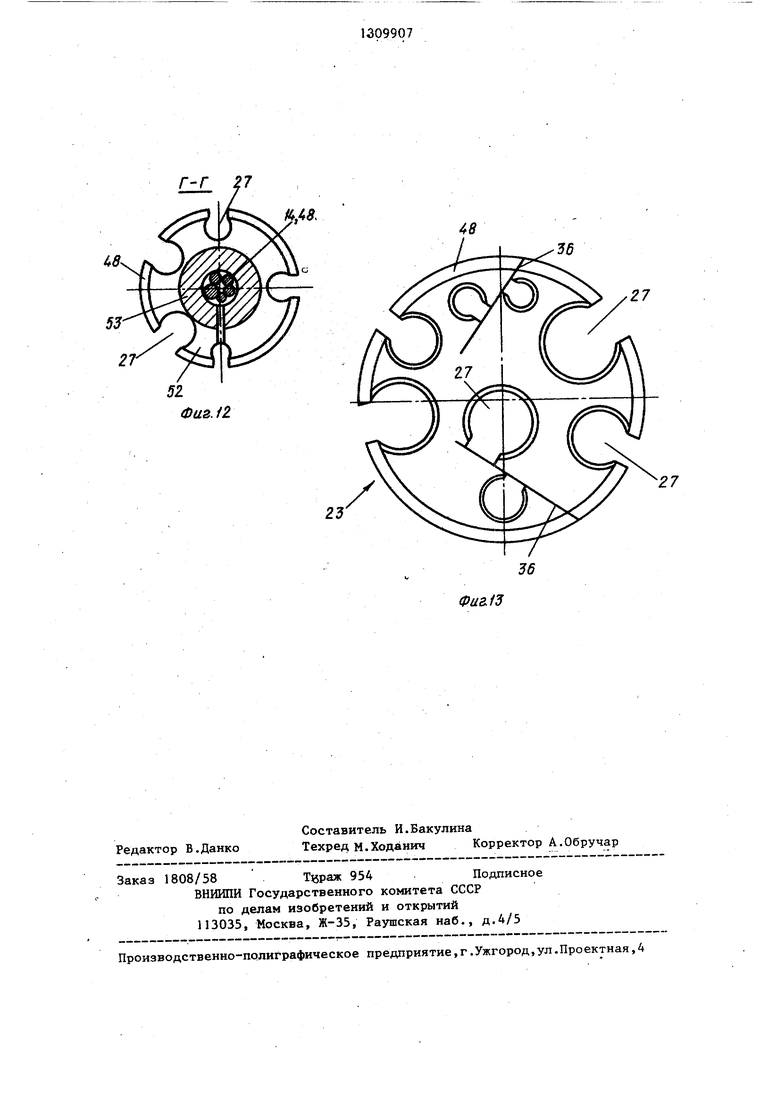
Зажатая в полом цили}адрическом корпусе 17 поперек его продольной оси дисковая цилиндрическая вставка 23, изображенная на фиг.З, 4, 6, 7, 8 и 13 имеет отверстия или выемки 27, которые в основном расположены по периферии. Торцевые стороны отверстий 27 снабжены скосами 28 (фиг.4). Отверстия 27 служат для центричного приема отдельных проводов пучка 14.
Согласно примеру вьшолнения по фиг.З отверстия 27 расположены по периферии. Для этого необходимо предусмотреть радиальньй вход 29, чтобы вводить отдельные линии в отверстия 27 снаружи. В зависимос-ти от их назначения провода выполнены с различной толщиной, вследствие чего отверстия 27 также имеют различные диаметры. Число и толщина необходимых питающих проводов могут изменяться от инструмента к инструменту. В зависимости от места подключения отдельных проводов к инструменту может также изменяться их распределение в пучке. С целью поддержания отдельных проводов во вставке 23 отверстия 27 имеют
этом в сочетании с проводами, которые в большинстве случаев снабжены оболочкой из эластичного материала, получается пружинное зажимное состояние, предотвращающее выпадание проводов. Как изображено на фиг.2 и 4 вставка 23 имеет в окружном направлении ступенчатый выступ 30, через который она направлена с геометричес5
Вставка 23 согласно фиг.2 допускает только ограниченную плотность монтажа проводов в пучке 14. В расположенное в центре отверстие можно вводить дальнейший провод путем надевания вставки 23.
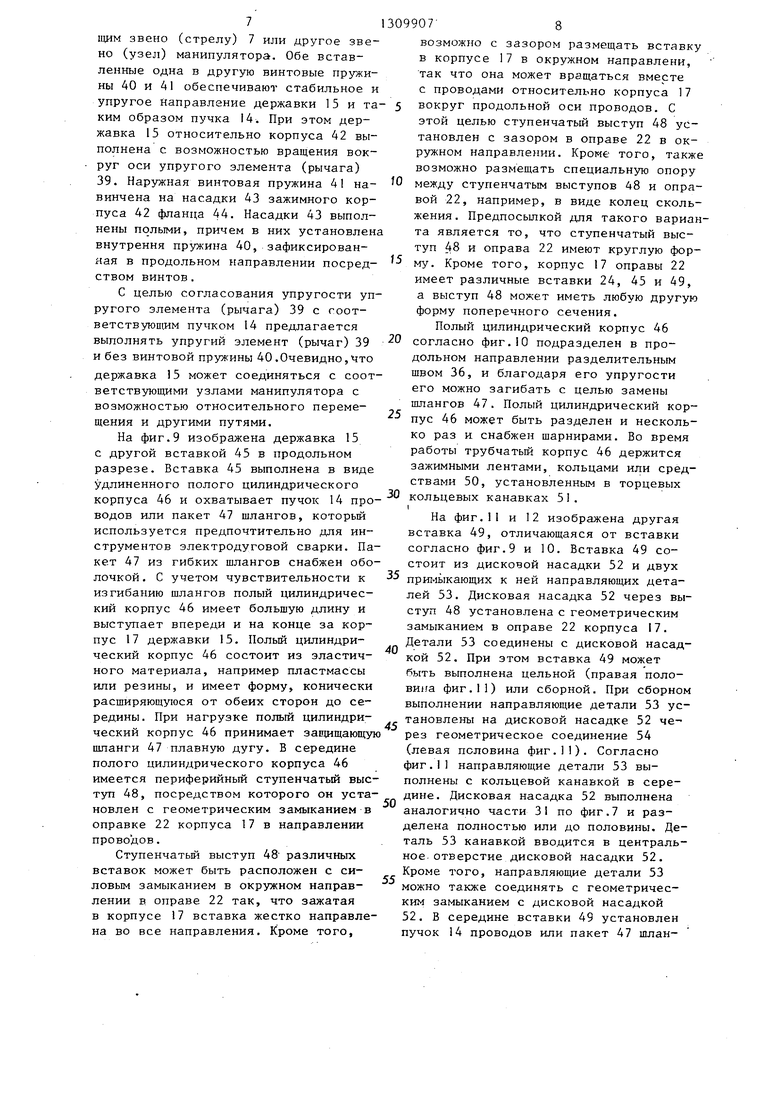
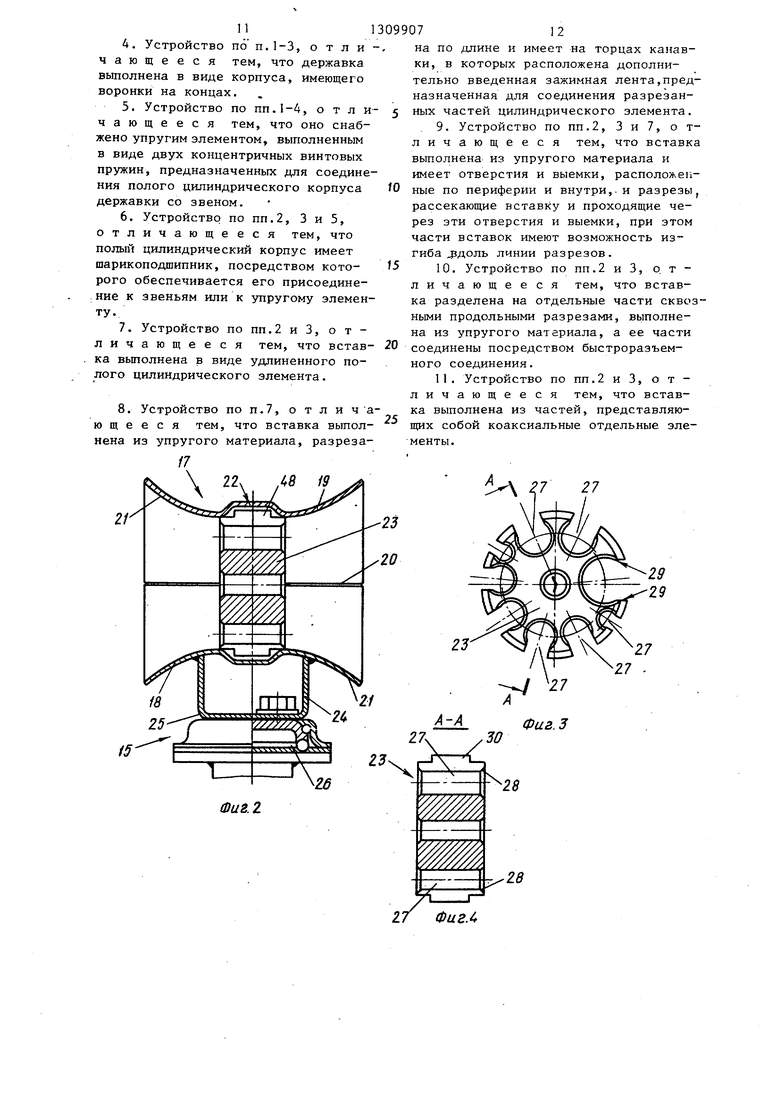
Примеры выполнения вставки согласно фиг.6-8 показывают возможность по- вьш1ения плотности монтажа без отказа от возможности быстрого соединения между вставкой и питающими проводами (установленными по периферии отверстия). Согласно фиг.6 дисковая цилиндрическая вставка 23 состоит из 5 двух частей 31 и 32, плотно контактирующих на разделительной линии 33 в собранном состоянии. В разъединенном состоянии разделительная линия
0
33 для каждой отдельной части 31 (32) представляет собой периферийный участок для вьшолнения дальнейших отверстий 27. После зажатия проводов части 31 и 32 соединяют одна с другой. Для образования соединенного с геометрическим замыканием диска части
31и 32 соединены одна с другой посредством быстроразъемного соединения например пружинного стопорного кольца 34 и т.п. При этом пружинное стопорное кольцо 34 может быть зенковано в выполненной по окружности канавке. Вдоль разделительной линии 33 отверстия 27 в отдельных частя х 31 и
32могут быть также расположены одно против другого.
На фиг,7 изображен другой вариант выполнения дисковой цилиндрической вставки 23, состоящей из трех частей Часть 31 выполнена составной, причем обе ее половины охватывают центрич- но расположенную часть 32 и таким образом обеспечивают геометрическое замыкание. В данном примере выполнения окружность части 32 образует разделительную линию. Часть 32 имеет по окружности отверстия 27. В противоположность данному примеру выполнения и часть 31 может иметь отверстия 27 в зоне разделительной линии 33. Части 3 и 32 можно соединять (аналогично фиг.6) посредством пружинного стопорного кольца или другим подходящим зажимным элементом. Кроме того, также возможно соединять половины части 31 посредством пружинного зажима, вдоль их разделительной линии.
На фиг.8 изображено установленное в окружной канавке пружинное стопорное кольцо 34 и геометрическое замыкание 35 частей 31 и 32.
На фиг.13 изображен вариант выполнения дисковой вставки по фиг.6. В данном случае дисковая цилиндрическая вставка 23 также имеет внутренние отверстия 27, которые со стороны окружности диска являются труднодоступными. Согласно данному примеру вьпюлнения дисковая цилиндрическая вставка 23 состоит из упругого материала, предпочтительно из пластмассы, и имеет два проходяпц Рх от ок- ружности во внутрь разделительных шва 36, к которым примыкают внутренние отверстия 27. Дисковую цилиндрическую вставку 23 можно отгибать
вдоль этих разделительных швов 36, благодаря чему внутренние отверстия 27 доступны для зажатия проводов.Благодаря упругости материала раздели- ,
тельный шов 36 закрывается самостоятельно. Кроме того, в монтированном состоянии дисковая цилиндрическая вставка 23 держится в окружном направлении оправой 22.
Направление питающих проводов 14 в нескольких державках 15 (фиг.1) является целесообразным только в том случае, если питающие провода при замене инструмента и/или пучка 14 можно быстро вынимать из державок 15. С этой целью предлагается выполнять полый цилиндрический корпус 17 сборным и соединять отдельные части 18 и 19 посредством быстрозажимного приспособления 37 и обычного шарнира 38 (фиг.5). Такое быстрозажимное приспособление 37 может состоять, например, из обычного запора с закруткой. При открытом корпусе 17 комплект пучка 14 проводов и вставок 23 можно заменять комплектом другого пучка проводов и вставок. При этом пружинный зажим позволяет оставлять соответствующие вставки на их пучке проводов.
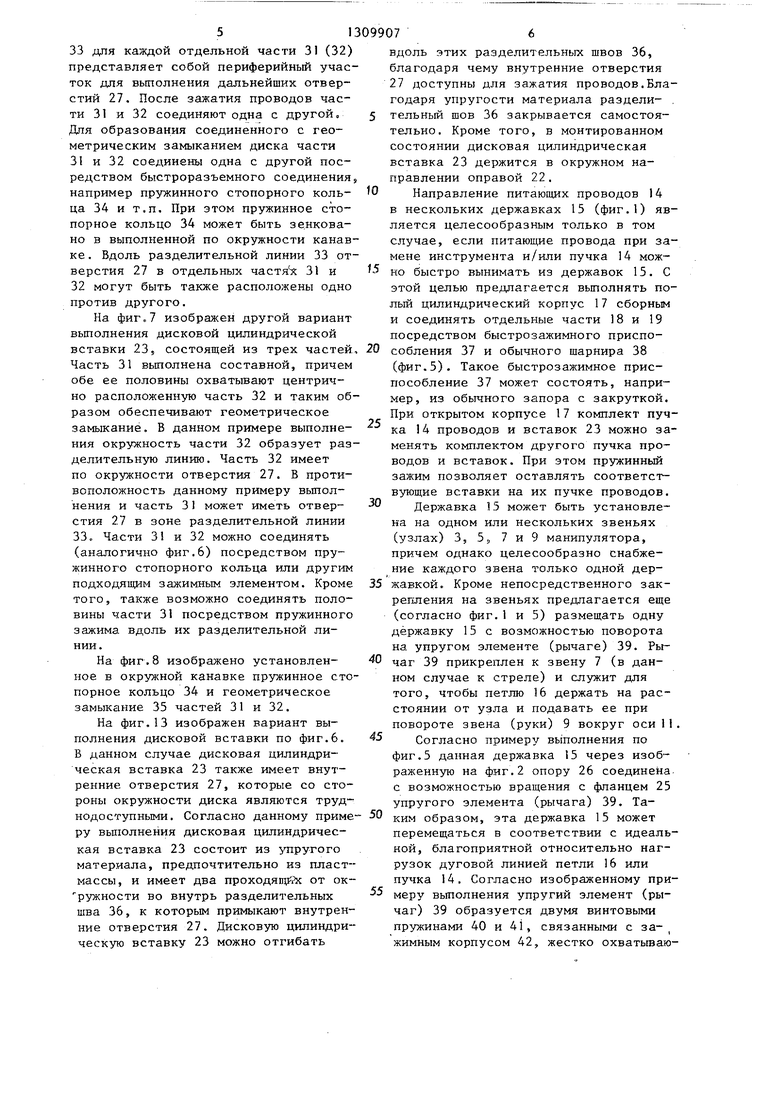
Державка 15 может быть установлена на одном или нескольких звеньях (узлах) 3, 55 7 и 9 манипулятора, причем однако целесообразно снабжение каждого звена только одной державкой. Кроме непосредственного зак- регшения на звеньях предлагается еще (согласно фиг.1 и 5) размещать одну державку 15 с возможностью поворота на упругом элементе (рычаге) 39. Рычаг 39 прикреплен к звену 7 (в данном случае к стреле) и служит для того, чтобы петлю 16 держать на расстоянии от узла и подавать ее при повороте звена (руки) 9 вокруг оси 11 .
Согласно примеру выполнения по фиг.5 данная державка 15 через изображенную на фиг.2 опору 26 соединена, с возможностью вращения с фланцем 25 упругого элемента (рычага) 39. ТаКИМ образом, эта державка 15 может перемещаться в соответствии с идеальной, благоприятной относительно нагрузок дуговой линией петли 16 или пучка 14. Согласно изображенному примеру выполнения упругий элемент (рычаг) 39 образуется двумя винтовыми пружинами 40 и 41, связанными с зажимным корпусом 42, жестко охватьгоаю7
щим звено (стрелу) 7 или другое звено (узел) манипулятора. Обе вставленные одна в другую винтовые пружины 40 и А1 обеспечивают стабильное и упругое Направление державки 15 и таким образом пучка 14. При этом державка 15 относительно корпуса 42 выполнена с возможностью вращения вокруг оси упругого элемента (рычага) 39. Наружная винтовая пружина 41 навинчена на насадки 43 зажимного корпуса 42 фланца 44. Насадки 43 выполнены полыми, причем в них установлена внутрення пружина 40, зафиксированная в продольном направлении посредством винтов.
С целью согласования упругости упругого элемента (рычага) 39 с соответствующим пучком 14 предлагается выполнять упругий элемент (рычаг) 39 и без винтовой пружины 40.Очевидно,что державка 15 может соединяться с соответствующими узлами манипулятора с возможностью относительного перемещения и другими путями.
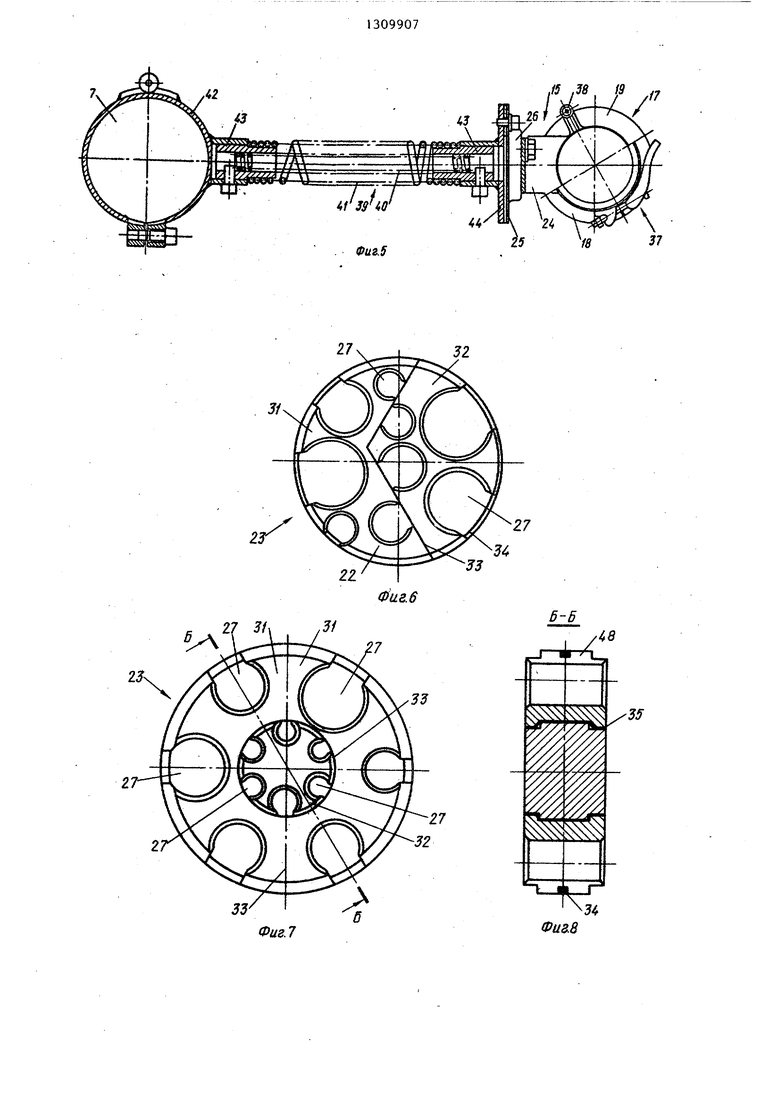
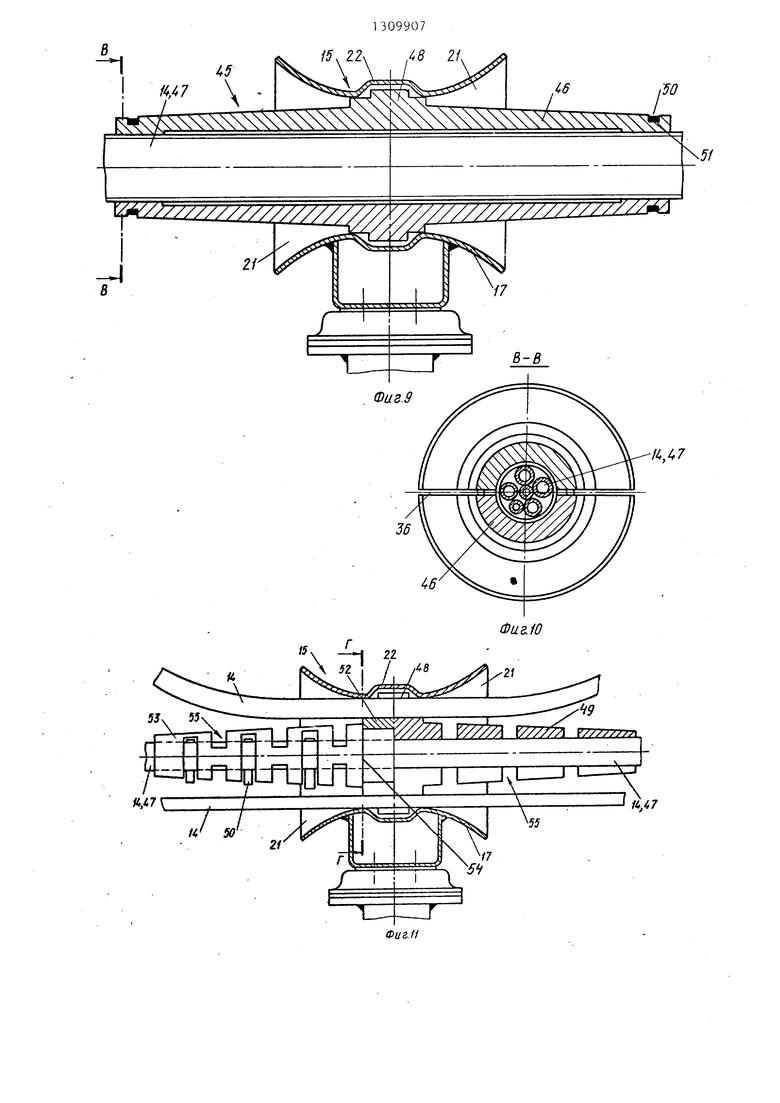
На фиг.9 изображена державка 15 с другой вставкой 45 в продольном разрезе. Вставка 45 выполнена в виде Удлиненного полого цилиндрического корпуса 46 и охватывает пучок 14 проводов или пакет 47 шлангов, которьй используется предпочтительно для инструментов электродуговой сварки. Пакет 47 из гибких шлангов снабжен оболочкой. С учетом чувствительности к изгибанию шлангов полый цилиндрический корпус 46 имеет большую длину и выступает впереди и на конце за корпус 17 державки I5. Полый цилиндрический корпус 46 состоит из эластичного материала, например пластмассы или резины, и имеет форму, конически расширяющуюся от обеих сторон до середины. При нагрузке полый цилиндрический корпус 46 принимает за1цищающую шланги 47 плавную дугу. В середине полого цилиндрического корпуса 46 имеется периферийный ступенчатый выступ 48, посредством которого он установлен с геометрическим замыканием в оправке 22 корпуса 17 в направлении проводов.
Ступенчатый выступ 48 различных вставок может быть расположен с силовым замыканием в окружном направлении в оправе 22 так, что зажатая в корпусе 17 вставка жестко направлена во все направления. Кроме того.
09907-8
возможно с зазором размещать вставку в корпусе 17 в окружном направлени, так что она может вращаться вместе с проводами относительно корпуса 17 5 вокруг продольной оси проводов. С этой целью ступенчатый выступ 48 установлен с зазором в оправе 22 в окружном направлении. Кроме того, также возможно размещать специальную опору O между ступенчатым выступов 48 и оправой 22, например, в виде колец скольжения. Предпосылкой для такого варианта является то, что ступенчатый выступ 48 и оправа 22 имеют круглую фор- 5 му. Кроме того, корпус 17 оправы 22 имеет различные вставки 24, 45 и 49, а выступ 48 может иметь любую другую форму поперечного сечения.
Полый цилиндрический корпус 46 0 согласно фиг.10 подразделен в продольном направлении разделительным швом 36, и благодаря его упругости его можно загибать с целью замены шлангов 47. Полый цилиндрический кор- пус 46 может быть разделен и несколько раз и снабжен шарнирами. Во время работы трубчатый корпус 46 держится зажимными лентами, кольцами или средствами 50, установленным в торцевых
0 кольцевых канавках 51 .
I
На фиг.II и 12 изображена другая вставка 49, отличающаяся от вставки согласно фиг.9 и 10. Вставка 49 состоит из дисковой насадки 52 и двух
5
0
5
0
5
при1«1ыкающих к ней направляющих деталей 53. Дисковая насадка 52 через выступ 48 установлена с геометрическим замыканием в оправе 22 корпуса 17. Детали 53 соединены с дисковой насадкой 32. При этом вставка 49 может быть выполнена цельной (правая половина фиг.I1) или сборной. При сборном выполнении направляющие детали 53 установлены на дисковой насадке 52 через геометрическое соединение 54 (левая половина фиг.11). Согласно фиг.11 направляющие детали 53 выполнены с кольцевой канавкой в середине. Дисковая насадка 52 выполнена аналогично части 31 по фиг.7 и разделена полностью или до половины. Деталь 53 канавкой вводится в центральное отверстие дисковой насадки 52. Кроме того, направляющие детали 53 можно также соединять с геометрическим замыканием с дисковой насадкой 52. В середине вставки 49 установлен пучок 14 проводов или пакет 47 пшангов. при этом дисковая насадка 52 дополнительно имеет по окружности доступные снаружи отверстия 27 для приема дальнейших проводов 14, выполненные в качестве зажимной державки.Эти провода 14, идущие, например, от средства питания, сначала расположены свободно, а затем опять сведены в пакет 47 шлангов.
Направляющие детали 53 имеют попе- 0 дов пучка 14, в результате чего
ременно расположенные выемки 55, служащие для повьшения упругости. Таким образом, направляющие детали 53 выполняют, ту же самую задачу, что и полый цилиндрический корпус 46.
Для введения пакета 47 шлангов вставка 49 имеет продольный разделительный шов 36. Согласно примеру выполнения по фир.12, вставка 49 выполнена цельной и состоит из упругого материала. При этом разделитель- ньм шов 36 доходит с одной стороны только до середины вставки 49 и позволяет гибкое отгибание вставки.Кроме того, вставка 49 может быть также полностью разделена, как это изображено на фиг.9 и 10 При сборном выполнении вставки 49 с учетом фиК. 6-8 возможны соответствуюш 1е варианты выполнения дисковой насадки 52. Направляющие детали 53 держатся у разделительного шва 36 зажимными лентами 50, как это изображено на фиг.11. Однако они могут также быть склеены: одна с другой.
Необходимое направление проводов может простираться от неподвижного основания 2 через все подвижные звенья (узлы) 3,5,7 и 9 до инструмента 10, но оно может также начинаться на любом звене, например звене (стреле) 7. Благодаря размещению державки на каждом подвижном звене питающие провода 14 образуют лишь сравнительно малые петли и уже поэтому они не подвергаются высокой весовой нагрузке. Кроме того, уменьшается динамическая нагрузка манипулятора. Закрепление с возможностью вращения державки 15 в зоне осей 4, 8, И и 13 имеет то преимущество, что эти точки находятся в относительно спокойном положении при относительных движениях соседних звеньев. Таким образом, перемещается лишь участок пучка 14, находящийся между перемещающимся и соседним звеньями (узлами). Остальные участки пучка 14 остаются в относительно спокойном положении и в крайнем случае совершают сопровождающее движение в результате незначительного поворота державки 15.
Благодаря изобретению становится возможным поворотное движение звена (стрелы) 7 в потолочном направлении без опасности обжима или какого-то ни было повреждения питающих прово
срок службы питающих проводов значительно повышается. Кроме того, они больше не являются источником опасных ситуаций. Державки 15 можно выполнять самым различным образом, например в виде разделительных планок.
Формула изобретения
1.Устройство для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов, содержащее основание, последовательно установленные на нем звенья, шарнирно соединенные между собой, рабочий орган, закрепленный на конечном звене, и питающие провода со средствами крепления их на соответствующих звеньях, отличающееся тем, что, с целью повьш1ения надежности работы, средство крепления питающих проводов выполнено в виде державки, закрепленной на оси шарнирного соединения этих звеньев между
собой, причем державка установлена с возможностью вращения вокруг оси Djap- нира.
2.Устройство по п.1, отличающееся тем, что державка снабжена вставкой для установки питающих проводов и выполнена в виде полого цилиндрического корпуса, составленного по меньшей мере из двух частей,
в полости которого расположена указанная вставка.
3. Устройство по п. 2, отличающееся тем, что в полом цилиндрическом корпусе выполнена посадочная поверхность, предназначенная для установки вставки, имеющей на своей наружной цилиндрической поверхности посадочную поверхность, ответную посадочной поверхности цилиндрического корпуса, а части полого цилиндрического корпуса шарнирно соединены друг с другом и снабжены бы- строразъемным приспособлением.
n
4.Устройство по п. 1-3, о т л и чающееся тем, что державка вьтолнена в виде корпуса, имеющего воронки на концах.
5.Устройство по пп.1-4, отличающееся тем, что оно снабжено упругим элементом, выполненным
в виде двух концентричных винтовых пружин, предназначенных для соединения полого цилиндрического корпуса державки со звеном.
6.Устройство по ПП.2, 3 и 5, отличающееся тем, что полый цилиндрический корпус имеет шарикоподщипник, посредством которого обеспечивается его присоединение к звеньям или к упругому элементу.
7.Устройство по ПП.2 и 3, о т - личающееся тем, что вставка выполнена в виде удлиненного полого цилиндрического элемента,
8.Устройство по п.7, о т л и ч а ю щ е е с я тем, что вставка выполнена из упругого материала, разреза
fO
0990712
на по длине и имеет на торцах канавки, в которых расположена дополнительно введенная зажимная лента,предназначенная для соединения разрезан5 иых частей цилиндрического элемента.
9.Устройство по ПП.2, 3 и 7, о т- личающееся тем, что вставка выполнена из упругого материала и имеет отверстия и выемки, расположенные по периферии и внутри,, и разрезы, рассекаюЕцие вставку и проходящие через эти отверстия и выемки, при этом части вставок имеют возможность изгиба здоль линии разрезов.
10.Устройство по ПП.2 и 3, о. т - личающееся тем, что вставка разделена на отдельные части сквозными продольными разрезами, вьтолнена из упругого материала, а ее части соединены посредством быстроразъем- ного соединения.
11.Устройство по ПП.2 и 3, о т - личающееся тем, что вставка выполнена из частей, представляющих собой коаксиальные отдельные элементы.
5
20
25
Фи&.2
27
-Афиз 3
27х.30
25 г-Кг
Фиг.
.15 .38 f9 .,
Фиг.$
1837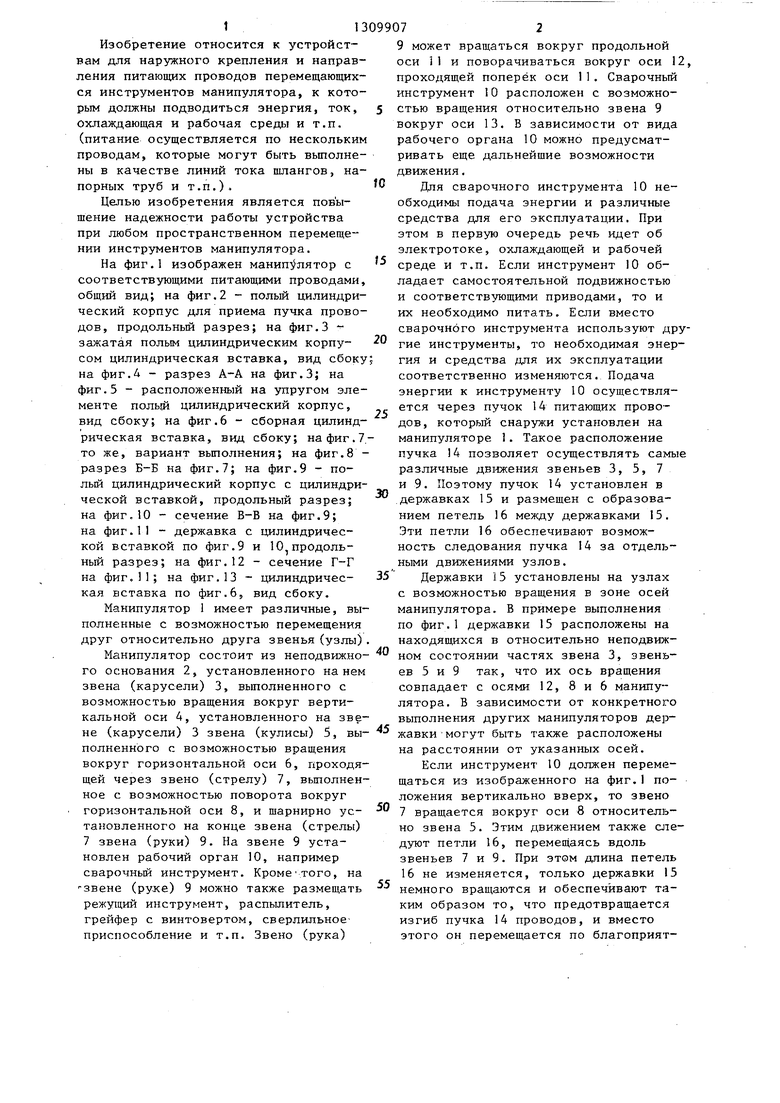
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического сцепления и расцепления носителя инструмента многоосного манипулятора | 1986 |
|
SU1421251A3 |
| Головка манипулятора | 1984 |
|
SU1362396A3 |
| Головка передачи для манипуляторов | 1986 |
|
SU1524801A3 |
| Редукторная головка для манипуляторов | 1986 |
|
SU1421250A3 |
| Передаточный механизм руки манипулятора | 1981 |
|
SU1153817A3 |
| Постоянно замкнутый стопорный тормоз,преимущественно для манипуляторов | 1981 |
|
SU1191000A3 |
| Автоматизированная поточная линия для сборки и сварки кузовов автомобилей | 1986 |
|
SU1609440A3 |
| Сварочное устройство | 1982 |
|
SU1175356A3 |
| Способ шовной роликовой сварки деталей с криволинейным профилем и устройство для его осуществления | 1987 |
|
SU1544176A3 |
| Защитное устройство направляющих | 1986 |
|
SU1468407A3 |
Изобретение относится к устройствам для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов, к которым должны подводиться энергия, ток, охлаждающая и рабочая среды или т.п. Целью изобретения является повьшение надежности работы устройства при любом пространственном перемещении инструментов манипулятора. Для этого державки 15, в которых установлен пучок 14 питающих проводов, размещенные вдоль по меньшей мере одного перемещающегося звена(узла) 3, 5, 7 или 9, закреплены с возможностью вращения на манипуляторе 1 в зоне осей 4, 5 и т.д. шарнирного соединения звеньев. 10 з.п. ф-лы,13 ил. СО / 00 о со со СП 0Uit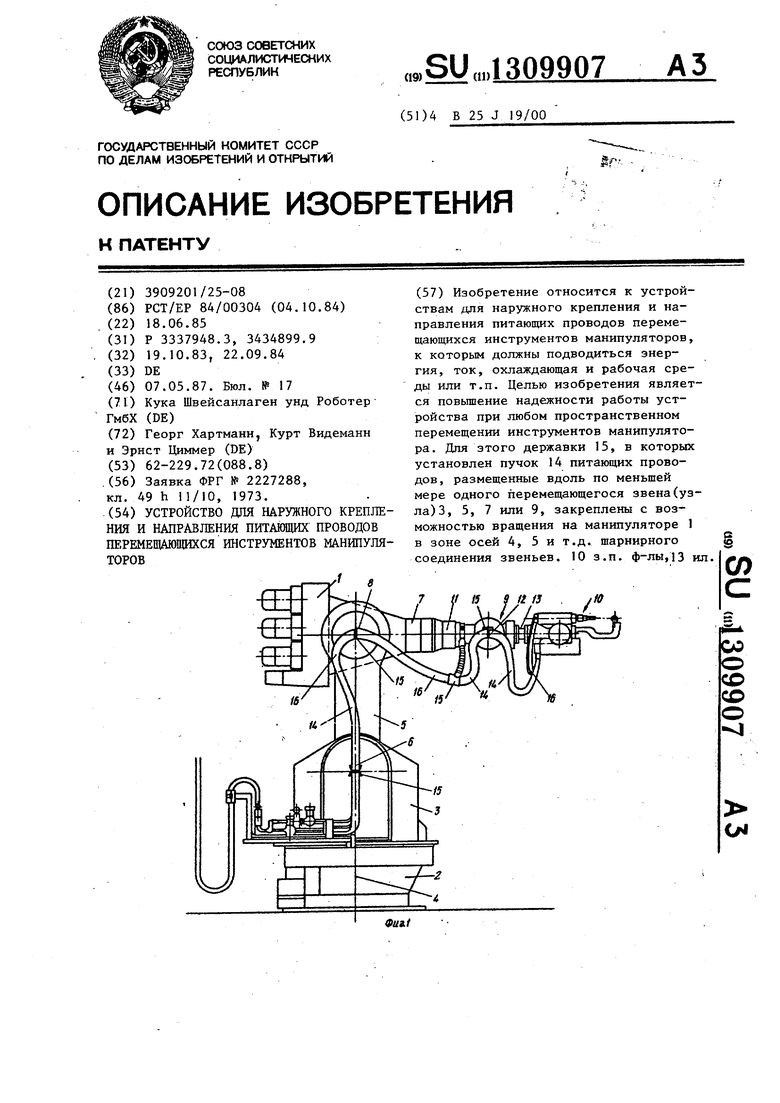
32
54
JJ
33
Фиг.7
6-6
33
/5J
Фиг.8
15, 22х ,48 2/.
I
УО
/
/4/7
«./7
Г-Г 27
36
27
Редактор В.Данко
Составитель И.Вакулина
Техред м.Ходанич Корректор А.Обручар
Заказ 1808/58 Тираж 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Фаг.13
