Ъ
to
Ю 01
СП


| название | год | авторы | номер документа |
|---|---|---|---|
| Головка манипулятора | 1984 |
|
SU1362396A3 |
| Головка передачи для манипуляторов | 1986 |
|
SU1524801A3 |
| Исполнительный орган манипулятора | 1980 |
|
SU1097187A3 |
| Устройство для автоматического сцепления и расцепления носителя инструмента многоосного манипулятора | 1986 |
|
SU1421251A3 |
| Способ шовной роликовой сварки деталей с криволинейным профилем и устройство для его осуществления | 1987 |
|
SU1544176A3 |
| Беззазорный привод | 1981 |
|
SU1261556A3 |
| Передаточный механизм руки манипулятора | 1981 |
|
SU1153817A3 |
| Головка манипулятора | 1985 |
|
SU1600621A3 |
| Сварочное устройство | 1982 |
|
SU1175356A3 |
| Устройство для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов | 1985 |
|
SU1309907A3 |

Изобретение относится к машиностроению. Цель изобретения - расшир ние функциональных возможностей редукторной головки для манипулятора за счет обеспечения вращения последнего звена без необходимости вращения при этом первого звена вокруг своей оси. Для этого редз торная головка имеет три концентрично расположенные друг относительно друга приводные вала. Посредством этих валов можно осуществить четыре различных вращательных движения: вращение первого звена 1 головки вокруг оси приводных валов, вращение среднего звена 2 относительно первого звена 1 вокруг первой наклонной оси 7, вращение последнего звена 3 головки относительно среднего звена вокруг второй наклонной оси 8 и вращение инструментодержателя 4 в пределах последнего звена 3 головки. 6 з.п. ф-лы, 14 ил. О)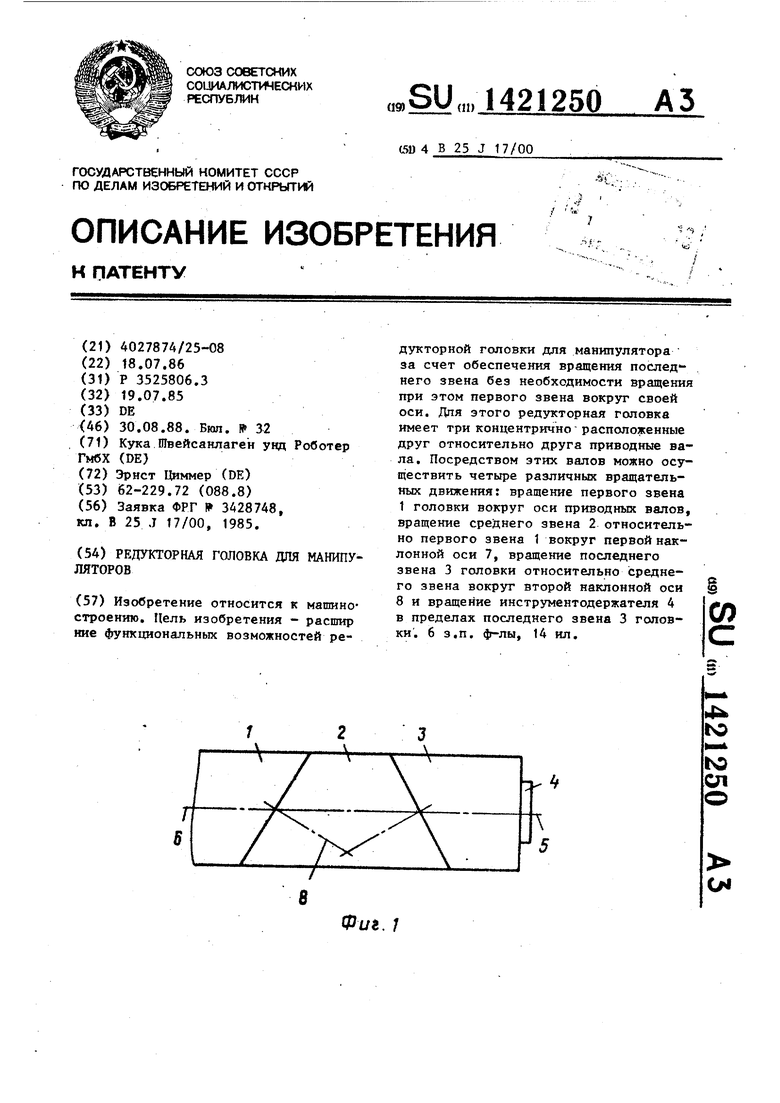
fput. J
Изобретение относится к машиностроению, а именно к редукторным головкам для манипуляторов.
Целью изобретения является расши- рение функциональных возможностей ре дукторной головки для манипулятора за счет обеспечения вращения последнего звена без вращения первого звена вокруг своей оси.
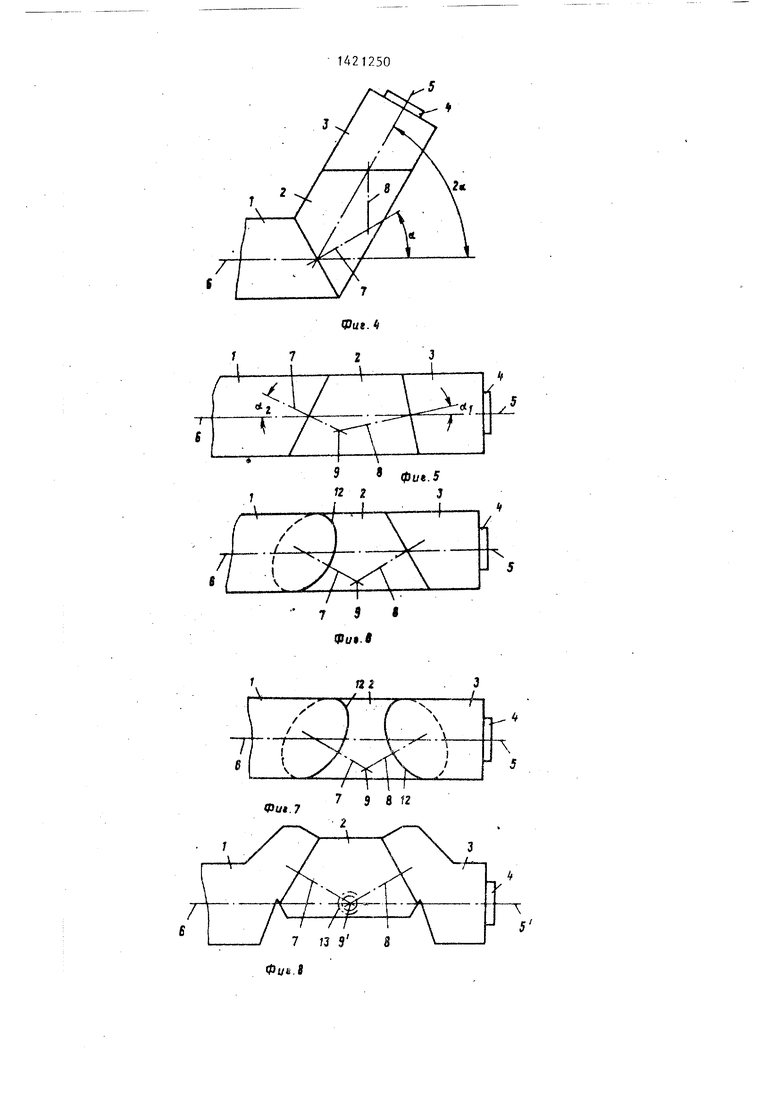
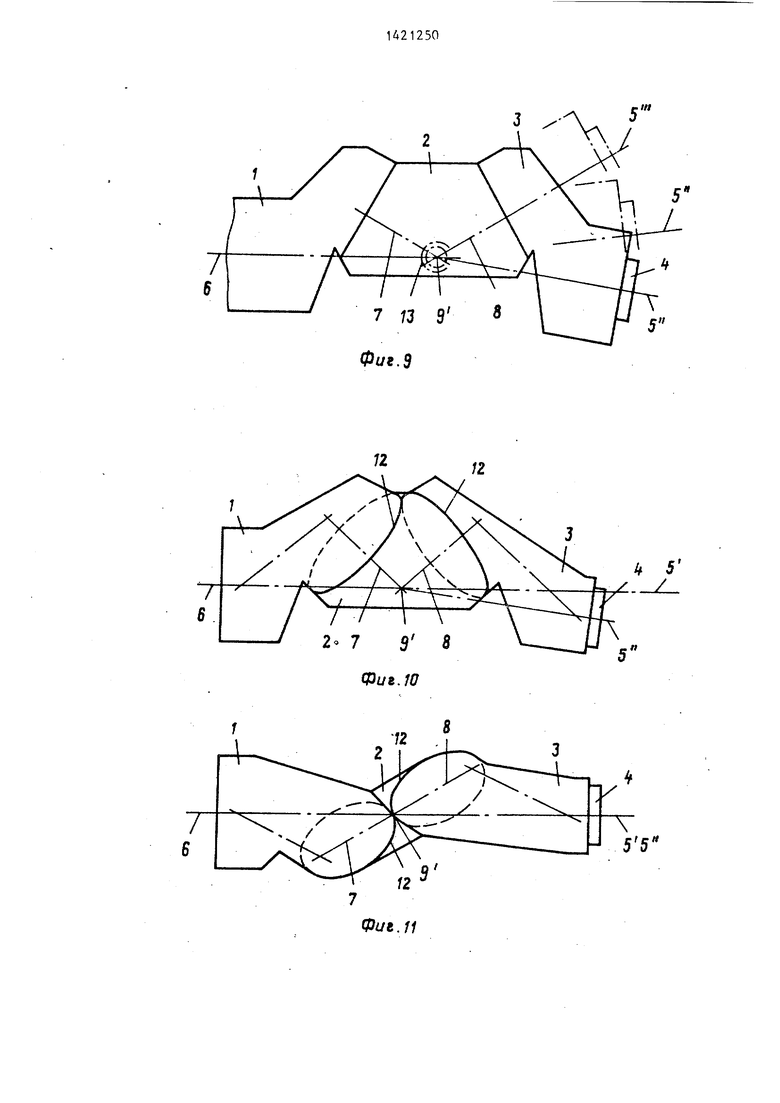
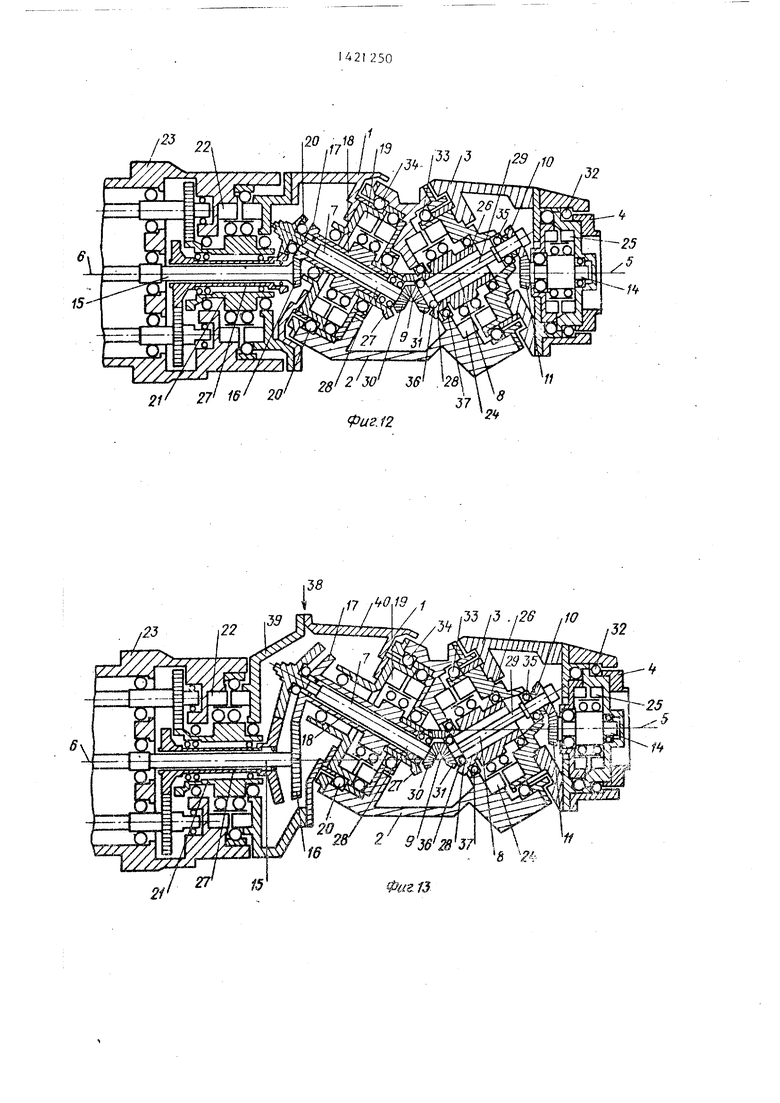
На фиг.1 изображена схема предла- :гаемой редукторной головки в вытянутом положении, вид сбоку; на фиг.2 - то же, с косо расположенной выходной частью, вид сбоку; на фиг.З - то же, при повороте последнего звена на угол 2о( на фиг.4 - то же, при повороте среднего звена на угол d , на фиг.5 - то же, В вытянутом положении с разнь - ми углами наклона осей на фиг.,6 - то же, с точкой пересечения наклонных осей в плоскости чертежаj на фиг,7 - то же, с расположением осей вне плоскости чертежа; на фиг,8 - то же, с пересечением осей на оси привода; на фиг.9 - то же, в вытянутом положении при наклонном положении выходной оси; на фиг.10 - то же, с точкой пересечения наклонных осей в плоскости чертежа, вид сбоку; на фиг.11 - то же, вид сверху; на фиг,12 - привод фланцевого диска с коаксиапьным расположением выходной оси с осью привода; на фиг,13 - то же, с параллельным расположением выходной оси с осью приводаj на фиг.14 то же, с наклонным расположением выходной оси к оси привода,
Редукторная головка для манипуляторов образована звеньями: первым звеном 1, средним звеном 2 и последним звеном 3«
При управлении с помощью вычислительной машины имеется неоднознач- кость в том случаеJ если инструменто- держатель 51ли фланцевьй диск 4 уста™ новлены на последнем звене 3 редукторной головки с возможностью вращения вокруг выкодной оси 5j расположенной соосно с осью 6 привода (ф№,IX В этом случае поворот инструменто- держателя вокруг выходной оси 5 мог бы быть реализован также путем вращения первого звена 1 редукторной головки BOKpyi оси. 6 привода. В та кой ситуация указанная неоднозначность может быть уст ранана только в том случае, если первое звено 1 головки установить без возможности вращения вокруг оси 6.
г Q
Q 5 Q
, 5
5
0
Позициями 7 и 8 обозначены наклонные оси поворота, вокруг которых происходит -относительное движение вращения среднего звена 2 головки по отношению к первому и последнему звеньями 1 и 3.
На фиг,2 показана одна из возможностей устранения такой неоднозначности за счет того, что выходная ось 5 установлена наклонно под острым углом к оси 6 привода. Предпочтительно, чтобы выходная ось 5 пересекала точку 9 пересечения двух наклонных осей 7 и 8, чтобы облегчить расчет перемещений, Позициякш 10 и 11 обозначены конич еские зубчатые колеса для привода фланцевого диска 4, Если необходимо вращательное движение инструментодержателя вокруг оси 5, то ясно, что для этого не нужно включать привод первого звена 1 редукторной головки, следовательно неоднозначность устраняется.
Последнее звено 3 редукторной го- ловки (фиг.З и 4) поворачивается относительно оси 6 привода на угол 2dl , при этом используются различные приводы вращения. В первом случае последнее звено 3 редукторной головки поворачивается на относительно неподвижнога среднего звена 2. Во втором случае среднее звено 2 с последним звеном 3, остающимся в одном и том же положении по отношению jc среднему звену 2, поворачивается на 180° относительно первого звена 1 редукторной головки. Именяца 1ся в результате этого неоднозначность может быть устранена посредством одного из вариантов редукторной головки (фиг.5- 11).
. Углы o(i и оС(фиг,5) расположения обеих осей 7 и 8 неравны, поэтому их точка 9 пересечения будет располагаться с боковым смещением из положения симметрии на фиг.1, Таким обра- 3OMj одинаковый поворот звеньев 2 и 3 головки приводит к отличающимся
друг от друга угловьш: положениям. I
На фиг,6 показано что наклонная
ось 7 выходит наклонно из плоскости чертежа таким образом, что точка 9 пересечения обеих наклонных осей 7 и 8 остается в плоскости чертежа. Эллипс 12 символизирует наклонную плоскость вращения, вдоль которой оба звена 1 и 2 редукторной головки сопрягаются друг с другом.
На фиг.7 показан вариант конструкции, согласно которому обе наклонные оси 7 и 8 наклонно отходят от плоскости чертежа. Точка 9 пересе чения наклонных осей 7 и 8 может лежать в стороне от оси 6 или в плоскости чертежа.
Значительное облегчение расчета автоматического управления перемещением обеспечивается в том случае, если точка пересечения 9 наклонных осей 7 и 8 лежит на оси 6 и если выходные оси 5, 5 и 5 пересекают эту точку 9. Чтобы было более понятно (фиг,8-11) выходная ось 5 имеет также обозначение 5, если она распо- ложена соосно с осью 6 привода и пере секает точку 9 (фиг.8-10), она получает обозначение 5 , если образует с осью 6 привода угол, также пересекая при этом точку 9 (фиг.9 и 10).
Наклонные валы 7 и 8 в первом и последнем звеньях 1 и 3 располагаются с таким боковым смещением, при котором они пересекаются на оси 6 привода.
На фиг.9 дополнительно показано наклонное положение выходной о.си 5 относительно оси 6 привода, что (как уже было сказано) устраняет неоднозначность управления этими осями. Ось 5 может перекрываться.осью Вив этом, случае обозначается позицией 5 , что с одной стороны равносильно сокращению передающих элементов, и, следовательно, конструктивных затрат, а с другой стороны - уменьшению диапазона перемещений, которого однако вполне достаточно в большинстве случаев. В результате соосности осей 8 и 5 не возникает неоднозначности при управлении с помощью вычислительной машины, так как при одновременной кинематической связи осей 7 и 8 последняя в качестве отдельной оси не имеет никаких функций.
Предполагается, что оси 6,7,8,5, 5 и 5 (фиг.8 и 9) в вытянутом псшожении редукторной головки леясат в плоскости чертежа. В варианте, показанном на фиг.8, неоднозначность еще не устранена. Но как известно из фиг.6 и 7 эта неоднозначность может быть устранена с помощью осей 7 и 8, наклонно выходящих из плоскости чертежа На фкг.10 и 11 показана ре дук- торная головка, вид сбоку и вид сверху, но при этом отдельные звенья 1,2 и 3 головки имеют выступающие в сто0
5
ррны части корпуса для расположения наклонных осей 7 и 8, выходящих из плоскости чертежа назад и вперед, а точка 9 пересечения наклонных осей 7 и 8 лежит в плоскости чертежа и является общей конечной точкой для осей 6 и 5 и 5 . Кроме того, выходная ось 5 расположена наклонно, вследствие чего она не лежит на одной оси с осью 6 привода в плоскости чертежа и, следовательно, не возникает неоднозначность при управлении с помощью вычислительной машины.
Показанная на фиГоВ-11 точка 9 пересечения осей 6,7,8,5,5 и 5 может быть центром шарового или карданного шарнира 13, с помощью которого ось 6 привода подвижно соединяется с выходной осью 5 ,5 и 5 . Шаровой или карданный шарнир 13 может быть выполнен в различных модификациях.
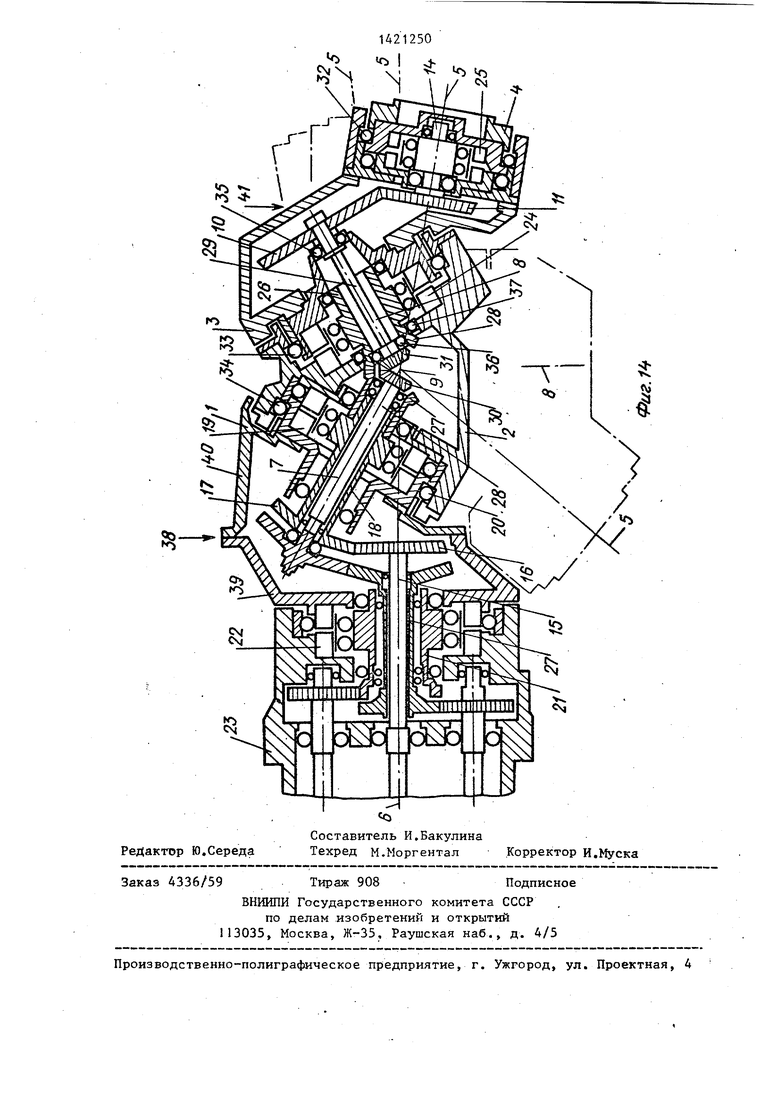
На фиг.12-14 показаны варианты вы- 5 полнения привода фланцевого диска 4, Выходная ось 5 (фиг,12) расположена коаксиально, а на фиг,13 - параллельно с осью 6 привода. Точка 9 пересечения осей 7 и 8 является общим кoнeчны пунктом осей 6 и 5 , 5 и
0
0
Наклонное положение ведомого
5
0
вала 14, расположенного на оси 5 и 5 является предпочтительным в манипуляторах с контурным управле кием, для.того чтобы устранить неоднозначности. Внутренний приводной вал
15через кони шские зубчатые колеса
16и 17 соединен с полым валом 18, который через редуктор 19 связан со средним звеном 2 головки. Среднее звено 2 посредством конических зубчатых колес 16 и 17 вращается вокруг оси 7 поворота. Звено 2 посредством подшипнт ов 20 установлено на первом звене 1 и расположено в плоскости,
перпендикулярной оси 7 поворота.
Внешний прцводной вал 21 через редуктор 22 непосредственно воздействует на первое звено 1 головки, которое расположено соосно с кронштейном
23 и установлено на нем с возможностью вращения. Все редукторы 19, 24, 22 и 25 расположены с выходной стороны, в результате чего обеспечивается беззазорная, компактная и малогаба5 ритная конструкция редукторной голов- ри. Редукторы 19, 24, 22 и 25 харак- теризуются редукцией с большим понижением. Вдоль второй наклонной оси 8
10
15
20
25
51А212
поворота расположен полый вал 26, который через конические шестерни 27 и .28 соединен с предшествующим ему полым валом 18. Полый вап 18 через редуктор 19 с большим понижением, ко- торый установлен на первом звене 1, приводит среднее звено 2 во вращение вокруг наклонной оси 7. Другой полый вал 26 редуктором 24 с болыним понижением опирается на среднее звено 2 и приводит последнее звено 3 во вращение вокруг второй наклонной оси 8, Оба редуктора 19 и 24 имеют одинаковую степень понижения и предпочтительно расположены относительно один другого, вследствие чего прилегающие друг к другу звенья 2 и 3 головки при вращении полых валов 18 и 26 со вершают одновременное, но противоположное по направлению вращательное движение,
Таким образом, с помощью полых валов 18 и 26 можно провести приводную кинематическую цепь, которая начинается от центрального приводного вала 27 и через расположенные внутри промежуточные валы 28 и 29 и конические пары колес 30,31 и 10,11 воздействуют на ведомьй вал 14, установленный на последнем звене 3 головки посредством редуктора 25 с большим понижением. Благодаря этом; приводится во вращение фланцевый который с помощью подшипника 32 уста- нсвлен на последнем звене 3 головки и снабжен инструментодержателем.
Последнее звено 3 головки посред- ством подшипник.а 33 установлено с возможностью вращения на среднем звене 2, которое посредством подшипника ЗА также установлено на первом звене 1. Промежуточный вап 29 с выходной стороны через подпгапник 35 установен на последнем звене 3 головки а с приводной стороны посредством подипника 36 - на полом 26, кото™ ьй, )з свою очередь, посредством подипника 37 установлен на среднем зва- не 2 головки.
На фиг.12 точка 9 пересечения на лонных осей (фиг.12) предусмотрена стороне от оси 6 привода но точка пересечения может также лежать и а оси 6, как это,показано на tor.13. этом случае смещение промежуточного 55 вена 38 осуществляется с помощью ланцевых элементов 39 и 40,
Следствие этого является боковое мещение ведомого вила 14 параллепь30
35
40
45
50
10
15
20
25
12
5
30
35
0
45
0
506
но оси 6 привода. Если это необходимо предотвратить, например, для случая позиционного управления, то в заднем звене головки можно предусмотреть об-. ратное смещение 41 при установке ве- домого вала 14, которое компенсирует боковое смещение и, следовательно, обеспечивает то, что ведомый вал 14 в вытянутом положении редукторной головки будет располагаться соосно с осью 6 привода. На фиг.14 показан привод фланцевого диска для манипуляторов с контурньп управлением, обеспечивающий устранение неоднозначности, при котором предпочтительно наклонное положение выходной оси 5 . Выходная ось З (фиг.14) получается благодаря обратному смещению 41 ведомого вала 1 | Б соответствии вариантом ,показанным на фиг.13,
Наклон выходной оси 5 относительно оси 6 привода может быть не только направлен вниз (как показано на фиг.14), но и вверх, что обозначено штрйхпунктиром.
Формула изобретения
2, Головка ПОП.1, отличающаяся тем, что кинематическая связь среднего и последнего звеньев осуществляется через установленные в среднем звене редукторы, связанные соответственно с полыми валами зтого звена.
10
212508
наклонной к плоскости чертежа,
20
Фиг. 2
2oL
Фиг. 3
Фи«.7
7 5 8 f2
J 5
5
5
L/
Фиб. 11
21
j35
tij ,019
29 ,ю
Фиг. 12
26 ,10
32
а
в 7л
Фиг. ГЗ
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
