1
Изобретение относится к машиностроению и может быть использовано в робототехнике.
Целью изобретения является повышение грузоподъемности и управляемости манипулятора при сохранении массы .элементов.
На фиг. 1 изображена кинематическая схема пpe u aгaeмoгo манипулятора; на фиг. 2 - шарнир манипулятора, продольный разрез.
Манипулятор содержит основание I, механическую руку, включающую подвижные звенья 2-4 и схват 5, соединенные между собой и с основанием шарнирами соединения; Каждый :i3 шарниров соединения состоит из полого корпуса и оси, составленной из двух коаксиальных валов, установленных с возможностью вращения друг относительно друга. Внутри каждого шарнира имеются: волновой редуктор, планетарная и коническая передачи. На основании I закреплен двигатель 6 с тормозом на постоянных магнитах, .связанный посредством торсионного вала 7 с ведущим зубчатым колесом 8 конической передачи первого шарнира соединения, связывающего основание I со звеном 2. Ведущее зубчатое колесо 8 смонтировано на подшипниковых опорах 9 основания 1 и зацепляется с промежуточным коническим колесом 10, закрепленным на внутреннем валу 11 - на оси шарнира соединения и зацепленным с ведомым коническим зубчатым колесом 12, смонтированным на подшипниках 13 на ведомом звене 2 и связанным торсионным валом 14 с ведущим зубчатым колесом 15 конической зубчатой передачи следующего шарнира соединения. Внутренний вал II установлен на подшипниковых опорах 16 и 17 в отверстии наружного вала оси
сл
со
шарнира, выполненного из двух жестко фединенных частей 18 и 19. Наружный йал оси шарнира соединен с основанием ll, а на нем на подшипниках 20 и 21 монтировано ведомое звено 2. На внутреннем валу 11 на подшипнике 22 установлено ведущее зубчатое колесо 33 планетарной передачи, име пп;ее topuoBbie кулачки 24, зацепляющиеся d сателлитами 25, также имеющими тор- itoBbte кулачки 26, установленные на т;одшипниках 27 и водилах 28, которые стираются на части 18 и 19 наружного
10
статор 48 второй электромагнитной , муфты, якорь 49 которой посредством шлидов 50 связан с кулачком 30 генераторов 31 и 32 волн.
Манипулятор работает следующим образом.
В нерабочем состоянии манипулятора его подвижные звенья 2-4 удерживаются от поворота посредством имеющегося в двигателе 6 тормоза на постоянных магнитах. При включении двигателя 6 одновременно отключается его ; тормоз, при этом получают вращение
нала оси.шарнира. Сателлиты 25 зацеп- 15его торсионный вал 7, связанное с
ляются с ведомым зубчатым колесом 29,ним ведущее колесо 8, промежуточное
Губчатый венец которо,го нарезан на колесо 10 и ведомое колесо 12 кони|ронкостенной втулке 30, наружная по-ческой передачи первого шарнира, тор
iepxHocTb«которой выполнена эллипти-сионный вал 14, ведущее колесо 15
iiecKoA и является кулачком для гибких 20конической передачи следующего шарi
(юддмипников, образующих генераторы |31 и 32 волн. Внутренняя поверхность втулки 30 (кулачка) цилиндрическая И опирается на два ряда роликов 33 И 34, внутренние-дорожки качения 1для которых выполнены на наружных hoBepxHO-стях частей 18 и 19 наружно- jro вала оси генератора. Гибкие под- шипники генераторов Ьолн 31 и 32
нира и т.д.,-т.е. получают вращение все элементы независимой кинемати- цепи, состоящей из конических передач и торсионных валов. От про- 25 межуточного колеса 10 конической передачи получают вращение внутренний вал 11 и связанное с ним через шлицы 39, кулачковую полумуфту 40 и кулачки 24 ведущее зубчатое колесо 23
1расположейы внутри гибкого зубчатого зо планетарной передачи, зацепленнь1:е с
колеса 35 и насаженного на него гиб- :кого зубчатого колеса 36, имеющих равные числа зубьев, но отличающихся коэффициентами смещения. Гибкие ко- :леса 35 и 36 жестко соединены с на- ружным в.алом оси шарнира и зацеплй- ются соответственно с жесткими коле- :сами 37 и 38, связанными с ведомым звеном 2. На конце внутреннего вала И имеются шлицы 39, по которым базируется кулачковая полумуфта 40, нагруженная пружиной 41 из электромагнитных муфт. Посредством кулачков 24 полумуфта 40 связывает
ним сателлиты 25 и ведомое зубчатое колесо 29, совмещенный с ним кулачок 30 и гибкие подшипники. Вращаясь, генераторы ЗГ и 32 волн деформируют
2,; неподвижные концентрически установленные гибкие колеса 35 и 36, которые зацепляясь с жесткими колесами соответственно 37 и 38, сообщают им вращательное движение. Вместе с жестки40 ми колесами 37 и 38 вращается связанное с ними звено 2, установленное на подшипниках 20 и 21. Вместе с ведомым звеном 2 поворачивается вокруг оси шарнира ведомое колесо 12 конивну-тренний вал 11 с ведущим зубчатым g ческой передачи, обкатываясь по про- колесом 23 планетарной передачи. На наружной поверхности кулачковой полумуфты 40 нарезаны шлицы 42,- по которым базируется вторая кулачковая полумуфта 43, нагруженная пружиной 44 электромагнитного переключателя, а его два соленоида 45 и 46, смонтированные на внутренней поверхности части 19 наружнего вала оси шарнира, имеют общий якорь 47, установленный с возможностью взаимодействия с полумуфтой 43 .
На части 19 наружнего вала оси . шарнира соединения закреплен также
межуточному колесу 10. Если кулачковая полумуфта 43 не соединена с кулачками 26 сателлитов 25, то последние вращаются на своих подшипни- 50 ках 27 относительно водил 28, смонтированных в половинах оси шарнира,.. Б этом случае ведомое колесо 29 планетарной передачи, связанный с ним кулачо.к 30 и гибкие подшипники генераторов 31 и 32 волн получают вращение, противоположное вращению ведущего зубчатого колеса 23 планетарной передачи и промежуточного колеса 10 конической передачи. Соответствен
55
статор 48 второй электромагнитной , муфты, якорь 49 которой посредством шлидов 50 связан с кулачком 30 генераторов 31 и 32 волн.
Манипулятор работает следующим образом.
В нерабочем состоянии манипулятора его подвижные звенья 2-4 удерживаются от поворота посредством имеющегося в двигателе 6 тормоза на постоянных магнитах. При включении двигателя 6 одновременно отключается его ; тормоз, при этом получают вращение
нира и т.д.,-т.е. получают вращение все элементы независимой кинемати- цепи, состоящей из конических передач и торсионных валов. От про- 5 межуточного колеса 10 конической передачи получают вращение внутренний вал 11 и связанное с ним через шлицы 39, кулачковую полумуфту 40 и кулачки 24 ведущее зубчатое колесо 23
планетарной передачи, зацепленнь1:е с
ним сателлиты 25 и ведомое зубчатое колесо 29, совмещенный с ним кулачок 30 и гибкие подшипники. Вращаясь, генераторы ЗГ и 32 волн деформируют
неподвижные концентрически установленные гибкие колеса 35 и 36, которые зацепляясь с жесткими колесами соответственно 37 и 38, сообщают им вращательное движение. Вместе с жесткими колесами 37 и 38 вращается связанное с ними звено 2, установленное на подшипниках 20 и 21. Вместе с ведомым звеном 2 поворачивается вокруг оси шарнира ведомое колесо 12 кони g ческой передачи, обкатываясь по про-
межуточному колесу 10. Если кулачковая полумуфта 43 не соединена с кулачками 26 сателлитов 25, то последние вращаются на своих подшипни- 50 ках 27 относительно водил 28, смонтированных в половинах оси шарнира,.. Б этом случае ведомое колесо 29 планетарной передачи, связанный с ним кулачо.к 30 и гибкие подшипники генераторов 31 и 32 волн получают вращение, противоположное вращению ведущего зубчатого колеса 23 планетарной передачи и промежуточного колеса 10 конической передачи. Соответствен55
но, имеет противоположное вращение ведомое звено 2.
Для реверсирования звена 2 подается напряжение, на статор 48 и на , один из соленоидов, например 45, электромагнитного переключателя, Пр этом якорь 49, притягиваясь к статору, фиксирует относительно ведущего звена (основания 1) кулачок 30 генераторов волн, а следовательно весь волновой редуктор и ведомое звено 2 В то же время якорь 47, смещаясь вправо (по чертежу) выводит из соеднения полумуфту 40 с кулачками 24 ведущего зубчатого колеса 23 планетарной передачи, тем самым разрывая передачу движения к нему от внутреннего вала 11. Это необходимо для уменьшения окружных скоростей зубчатых колес и облегчения работы кулачков. После этого отключается статор 48 и соленоид 45, и подается напряжение на соленоид 46. Якорь 47 при этом перемещается влево (по чертежу) преодолевая сопротивление пружины 44, одновременно вводит в соединение с кулачками 24 и 26 соответственно полумуфты 40 и 43. Тем самым ведущее и ведомое зубчатые колеса 23 и 29 и сателлиты 25 превращаются в один блок, связанный с внутренним валом 11 и вращающийся с его частотой как одно целое. В этом случае кулачок 30 генераторов воль имеет то же направление вращения, что и промежуточное колесо 10 конической передачи. Соответственно, то же направление вращения имеет и звено 2, Если условиям работы манипулятора ведомое звено 2 не должно вращаться относительно оси шарнира, то как и при реверсировании, посредством соленоида- 45, якоря 47 и полумуфты 40 рассоединяются ведущее зубчатое .колесо 23 планетарной передачи и внутренний вал 11, и одновременно при помощи статора 48 и якоря 49 фиксируется кулачок 30 генераторов волн. При этом волновой редуктор теряет способность передавать движение, а ведомое Звено 2 неподвижно относительно оси шарнира.
Управление шарнирами является независимым и каждый из них посредством электромагнитного переключателя и электромагнитной муфты может пере-; давать прямое вращение, обратное вращение или фиксировать звенья одно
653006
относительно другого. При этом независимая кинематическая цепь, состоящая из торсионных валов и конических g передач, постоянно работает и передает вращение до тех пор, пока работает приводной двигатель-6. При отключении двигателя 6 срабатывает его тормоз на постоянных магнитах, неза- 10 висимая кинематическая цепь затормаживается и все звенья фиксируются. Для более надежной фиксации звеньев, особенно находящихся под нагрузкой, можно подавать напряжение на статор 15 48 электромагнитной муфты.
Формула изобретения Манипулятор, содержащий основание, механическую руку в виде звеньев,шар- 20 нирно соединенньрс между собой, с основанием и с захватом, при этом каждый шарнир соединения включает ось, состоящую из двух коаксиальных валов, установленных с возможностью 25 вращения друг относительно друга, волновой редуктор, жесткие колеса которого связаны с ведомым звеном механической руки, планетарную передачу, коническую передачу с ведущим, 30 промежуточным и ведомым колесами, а также две электромагнитные муфты и торсионные валы, причем ведущее и ведомое колеса конической передачи установлены соответственно на веду- 35 Щем и ведомом звеньях механической руки, а конические передачи всех шарниров соединения связаны между собой и с выходным элементом привода, . установленного на основании посред- 40 ством торсионных валов, отличающийся тем, что, с целью увеличения грузоподъемности при сохранении массы шарниров, волновой редуктор выполнен в виде двух гене- 45 раторов волн и двух гибких колес, установленных концентрично друг другу и закрепленных на наружном валу оси шарнира соединения, а промежуточное колесо конической передачи и ведущее 0 колесо планетарной передачи установлены на внутреннем валу оси, причем зубчатый венец ведомого колеса планетарной передачи закреплен на внутренней поверхности кулачка генерато- 5 РЗ волн, а наружный вал оси щарнира соединения выполнен из двух частей, соединенных между собой водилом планетарной передачи, при этом электромагнитные муфты установлены соответственно на наружном валу с возможностью взаимодействия с кулачком генераторов волн и на внутреннем валу с возможностью поочередного взаимодействия посредством дополнительно введенного электромагнитного переключателя с ведущим колесом и сател- t; литом планетарной передачи,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Шарнир манипулятора | 1979 |
|
SU804429A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Шарнир-редуктор | 2021 |
|
RU2764471C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| Предохранительная кулачковая муфта | 1985 |
|
SU1276863A1 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
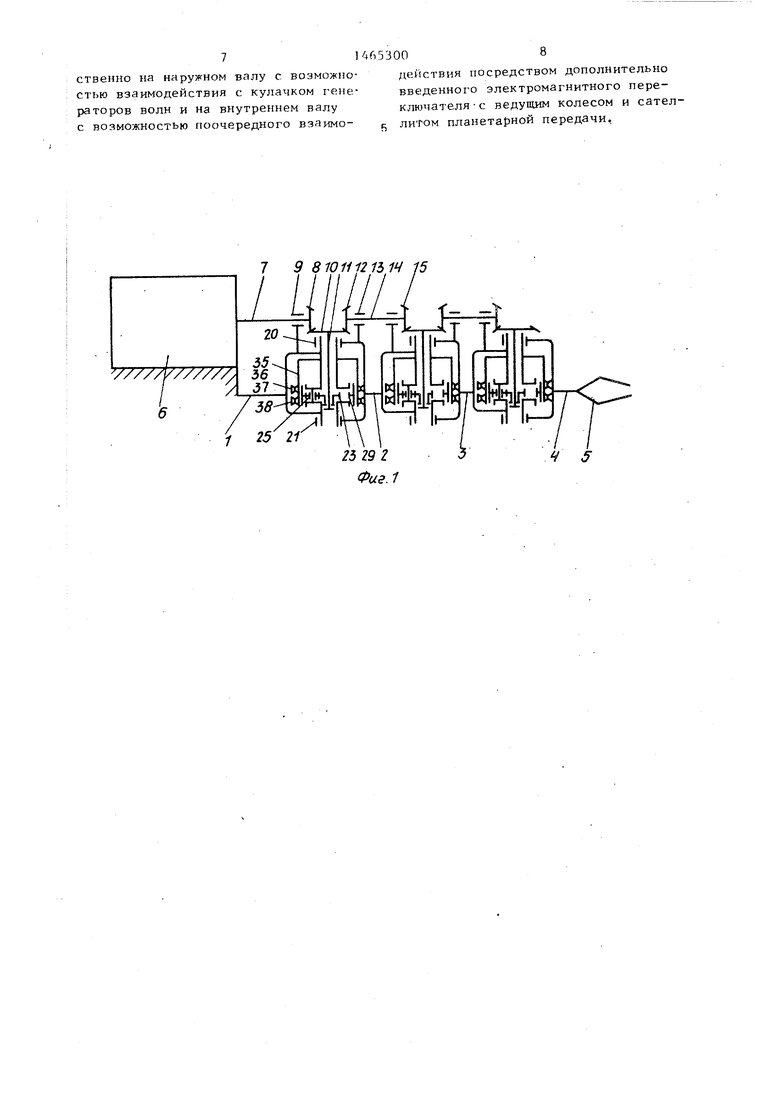
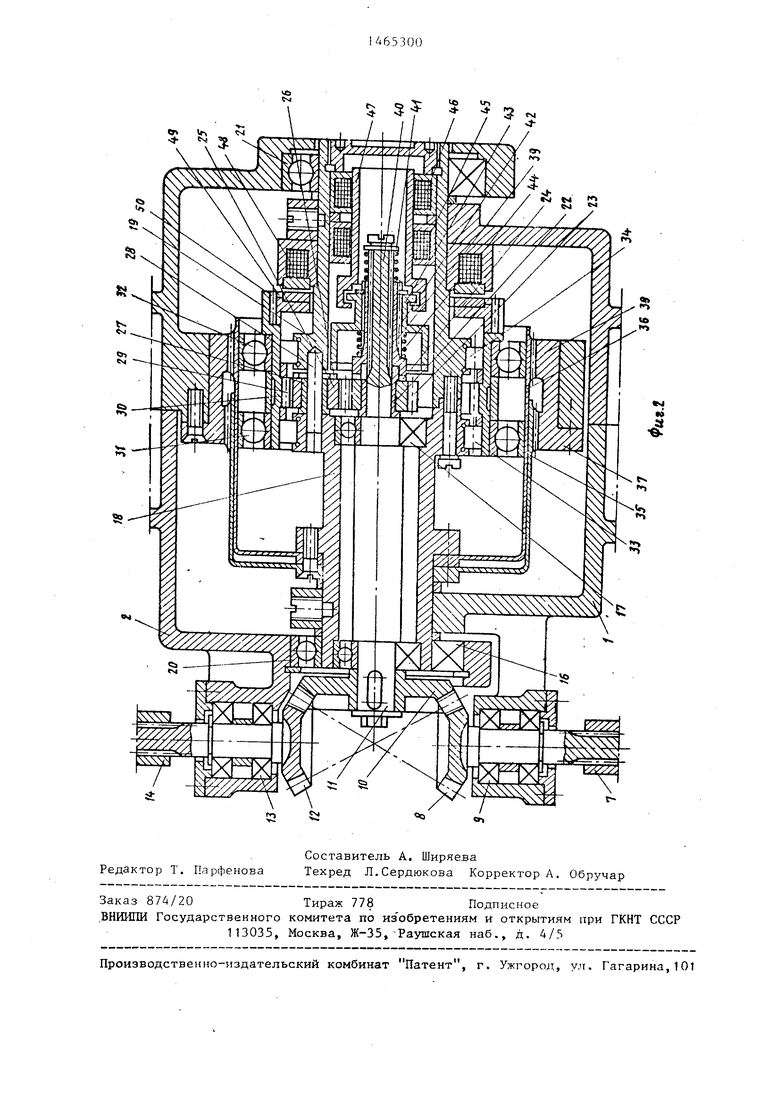
Изобретение относится к машиностроению и может быть использовано в робототехнике. Целью изобретения является повьпяение. грузоподъемности и управляемости манипулятора при сохранении массы элементов. Волновой редуктор выполнен в виде двух генераторов волн и двух гибких колес. По- бпедние установлены концентрично Друг другу и закреплены на наружном валу оси шарнира Соединения. При этом промежуточное колесо конической передачи и ведущее колесо планетарной передачи установлены на внутреннем валу оси. Зубчатый венец ведомого колеса планетарной передачи закреплен на внутренней поверхности кулачка генератора волн. 2 ил.
9 81011121ЫЧ 15
Гг
ч 5
le vr
5 5;
fn
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
