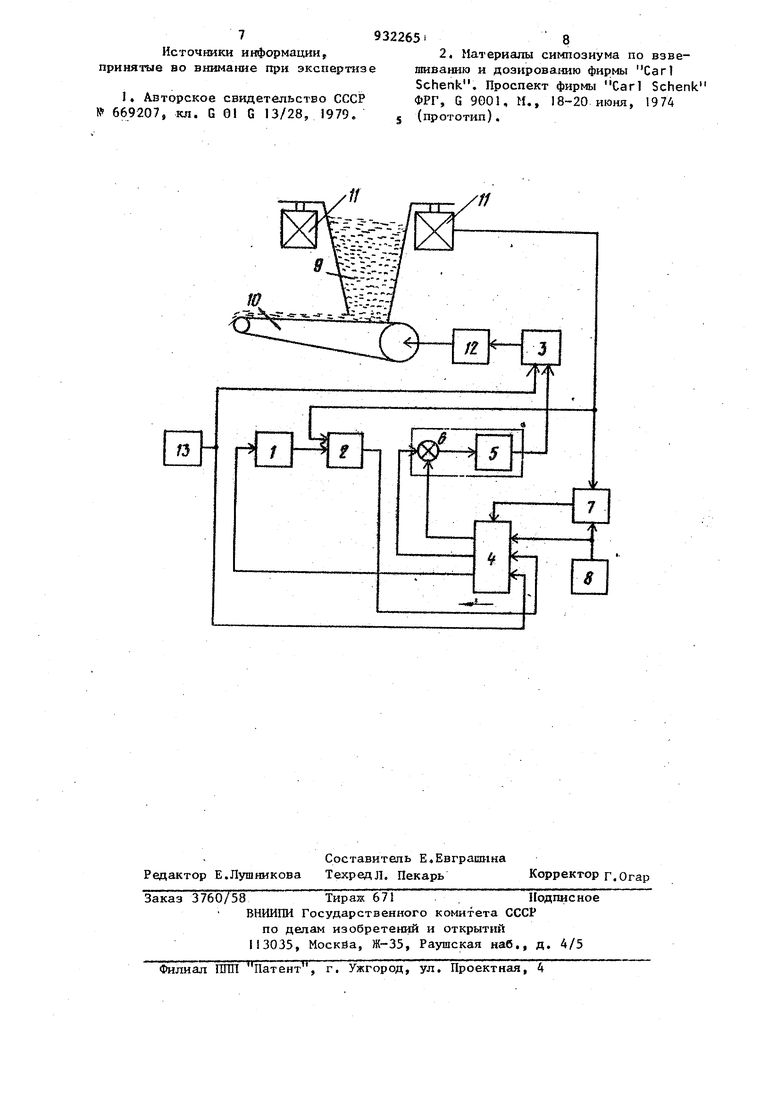
Изобретение относится к весодозирукхдей технике и может быть испол зовано в конструкциях весовых дозат ров непрерывного действия. Известны способы весового дозирования осуществляекые по сигналу, пропорциональному расходу массы, подаваемому с помощью питателя, который разгружает бункер с последуюпщм вычислением расхода массы матери ала на выходе питателя, сравнением сигналов пропорциональных заданному и измеренному расходу массы и выработки корректирующего сигнала и дозаторы сыпучих материалов, содержа щие загрузочное устройство с питателем, весоизмерительный транспортер, сумматор, задатчик расхода массы, регулятор с элементом сравнения 1 . Недостатком способа весового дозирования и дозатора сыпучих материалов является низкая точность дози- ррвания. Наиболее близким по технической сущности к предлагаемому является способ, заключа1асщйся в том, что задают в текущие моменты времени сигнала, пропорционального заданному расходу массы, подают на усилитель мощности, корректирукмций сигнал и сигнал, пропорциональный заданному расходу массы, для разгружения бункера и формирования расхода массы по величине, равной заданному расходу, и измеряют текущее значение массы материала в бункер 2. Недостатком этого способа является низкая точность измepe шя, так как точность этого способа определяется измерением скорости изменения массы материала в бункере, что сопряжено с необходимостью использования диффере1щиаторов, обладающих 1шзкой точностью. Наиболее близким по технической сущности к предлагаемому является дозатор, содержащий загрузочное устройство с питателем, устаповленным на сило -5змерительный преобразователь, задатшк расхода массы, выкод которого соея1;ннен с одним из входов сумматора, выход которого через усилитель мощности соединен с питателем, регулятор с элементом сравнения, выход которого соединен с другим входом сумматора 2, Недостатком этого дозатора является j-гизкая точность дозирования , Цель изобретения повышение точности дозирования. Поставленная цель достигается тем, что интегрируют сигнал, пропорциональный за,цанному расходу массы в интервале времени от момента равенства текущего значения массы материала в бункере заданной величине массы до текущего значения времени, и сравнивают сигнал, пропорциональный заданной массе материала в бункере с суммой сигналов, состоящей из сигнала, пропорционального интегральному значению заданного расхода массы и сигнала, пропорционального значе 1ию -массы материала в бункере и по результату сравнения этих сигналов определяют корректирующий сигнал, подаваемый на усилитель мощности. Кроме того, в дозатор- сыпучих материалов введены блок сравнения сигналов, коммутатор, задатчик контролируемой массы материала, дополнитель ньш сумматор и интегратор, выход которого соединен с одним из входов дополнительного сумматора к другому входу которого подключен выход силоизмерительного преобразователя и оди из входов блока сравнения сигналов, выход которого соединен с управляющим входом коммутатора, при этом выход дополнительного сумматора, через коммутатор соединен с одним из входов элемента сравнения регулятора, второй вход которого через коммутат тор соединен с выходом задатчика ко тролируемой массы материала и вторым входом блока сравнения сигналов, а вход интегратора через коммутатор с динен с выходом задатчика расхода массы. На чертеже схематически изображе дозатор сыпучих материалов. Дозатор сыпучих материалов имеет интегратор 1, два сумматора 2 и 3, коммутатор 4, регулятор 5 с элементом 6 сравнения, устройство 7 сравнения сигналов, задатчик 8 массы материала в бункере, бункер 9 с питателем 10, опертые на силоизмерительный преобразователь 11, усилитель 12 мощности и задатчик 13 расхода массы, выход которого соединен с одним из входов сумматора 3 и через коммутатор 4 с входом интегратора 1, выход которого соединен с одним из входов сумматора 2, йторой вход которого соединен с выходом силоизмерительного преобразователя 11 и одним из входов устройства 7 сравнения сигналов. Выход сзТ-матора 2, через коммутатор 4 соединен с одним из входов элемента 6 сравнения регулятора 5, второй вход которого через коммутатор 4 соединен с выходом задатчика 8 массы материала в бункере и вторым бходом устройства 7 сравнения сигналов . При этом выход устройства 7 сравнения сигналовсоединен с управляющим входом коммутатора 4. Второй вход сумматора 3 соединен с выходом регулятора 5, а выход сумматора 3 соединен с входом усилителя I2 мощности питателя 10, Дозатор работает следующим образом. Сьшучий материал из 9 поступает на питатель 10. Масса материала, находящаяся в бункере 9 и на питател 10, измеряется силоизмерительным преобразователем 11, выходной сигнал которого пропорциональный измеряемой массе, с выхода силоизмерительного преобразователя II поступает на входы сумматора 2 устройства 7 сравнения, на второй вход которого поступает сигнал с выхода задатчика 8 массы материала в бункере 9. По мере схода материала из бункера 9 сигнал преобразователя 11 силы уменьшается и при равенстве сигналов силоизмерительного преобразователя 11 и задатчика 8 массы материала в бункере срабатывает устройство 7 сравнения сигналов, подавая команду на управляющий вход коммутатора 4. Комг-гутатор 4, срабатывая, соединяет выход задатчика 13 расхода массы с входом интегратора 1, выход сумматора 2 с первым входом элемента 6 сравнения регулятор 5, выход задатчика 6 массы материала с вторым входом элемента 6 сравнения. При этом на сумматоре 2 происходит суммирование сигналов, пропорциональных соответственно, количеству материала, которое должно было быть вьода- но дозатором за интервал времени от момента срабатывания- устройства 7 сравнения сигналов, т.е. момента равенства массы материала в бункере 9 заданной величине на задатчике 8, до.текущего момента времени, и количеству материала, оставшегося в бун кере 9 и на питателе 10. При расходе массы на выходе питателя 10, равном заданному на задатчи ке 13, сигнал на выходе сумматора 2 должен оставаться равным сигналу на выходе задатчика 8 массы материала в бункере, а сигнал на выходе элемента 6 сравнения регулятора 5 должен быть равен нулю. При отклонении расхода питателя 10, например, в большую сторону от заданного расхода массы задатчиком 13, сигнал на выходе элемента 6 сравнения, равньй сумме сигналов с выхода интегратора I, силоизмеритея ного преобразователя I1 и задатчи- ка 8, имеет отрицательное значение. При этом сигнал на выходе суммат ра 3, равный сумме управляющего сигнала, цропорционального сигналу задатчика 13 и корректируклдего сигнала, снимаемого с выхода регулятора 5, уменьшается. Это приводит к уменьшению расход массы на выходе питателя 10 и, как следствие, к устране1шю отклонения расхода массы на выходе питателя от заданного расхода массы, установленного на задатчике 13. Таким образом, способ весового до зирования сыпучих материалов и дозатор сыпучих материалов, реализуюощй этот способ, позволяют повысить точность дозирования, в результате чего уменьшается перерасход дорогостоящих сыпучих материалов и обеспечивается требуемое их количество при производ стве конечного продукта. Формула изобретения 1. Способ весового дозирования сыпучих материалов, заключающийся в том, что задают в текущие моменты времени сигнал, пропорциональный за56данному расходу массы, подают на привод питателя корректирующий caritaii и сигнал, пропор 1иональю 1й заданному расходу массы, для разгружения бункера и формирования расхода массы по величине, равной заданному расходу, и измеряют текущее значение массы материала в бункере, о т л и ч аю щ и и с я тем, что, с целью повышения точности дозирования, интегрируют сигнал, пропорциональный задан- расходу массы, в интервале времени от момента равенства текущего значения массы материала в бункере заданной величины массы до текущего значения времени и сравнивают сигнал, пропорциональный заданной массе материала в бункере, с суммой сигналов, состоящей из сигнала, пропорционального интегральному значению заданного расхода массы, и сигнала, пропорционального значению массы материала в бункере, и по результату сравнения этих сигналов определяют корректирующий сигнал, подаваемый на привод питателя. 2. Дозатор сыпучих материалов, содержаи й бункер с питателем, установлениям на силоизмерительный преобразователь, задатчик расхода массы, выход которого соединен с одним из входов сумматора, выход которого через усилитель мсяцности соединен с питателем, регулятор с элементом сравнения, выход которого соединен с другим входом сумматора, отличающийся тем, что, с целью повышения точности дозирования, в него введены блок сравнения сигналов, коммутатор, задатчик контролируемой массы материала, дополнительный сумматор и интегратор, выход которого соединен с одним из входов дополнительного сумматсфа, к другому входу которого подключены выход силоизмерительного преобразователя и один из входов блока сравнения сигналов, выход которого соединен с управляющим входом коммутатора, при этом выход дополнительного сумматора через коммутатор соединен с одним из входов- элемента сравнения регулятора, второй вход которого через коммутатор соединен с выходом задатчика контролируемой массы материала и вторым входом блока сравнения сигналов, а вход интегратора через комь утатор соединен с выходом задатчика расхода массы.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР № 669207, кл. G 01 G 13/28, 1979.
2, Материалы симпозиума по взвешиванию и дозирова1таю фирмы Саг Schenk. Проспект фирмы Carl Schenk ФРГ, G 9001, М,, 18-20 июня, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
| Дозатор сыпучих материалов | 1985 |
|
SU1317286A1 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |
| Дозатор сыпучих материалов | 1986 |
|
SU1432338A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1108335A2 |
| Весовой дозатор непрерывного действия | 1984 |
|
SU1255867A1 |
| Дозатор непрерывного действия | 1978 |
|
SU771471A1 |
| Дозатор непрерывного действия | 1985 |
|
SU1278598A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
