оптимиза1,1;ии, масштабирующие блоки 17, 18 и 1.9, блок 20 планирования эксперимента, блоки 21 и 23 памяти, командньм блок 22, анализатор 24 выходов объекта оптиьшзации, блоки расчета координат отраженной вершины сиьшлекса 25 и 26, блок 27 запоминания наилучших входов объекта оп тимизации и переключаюп1ий блок 28. Введение в систему автоматической оптимизации моделей оптимизируемого объекта, второго блока коор динат отраженной вершины симплекса, блока запоминания наилучших входов и переключающего блока дает возможность на каждой итерации поиска pea лизовать на объекте оптимизации и его моделях воздействия, соответст1
Изобретение относится к области автоматического управления и может быть использовано для оптимизации параметров регулирующих и управляющих систем, например, в аглодоменных и сталеплавильных цехах, а также в проектно-конструкторских организао.и- ях при настройке создаваемых систем управления.
Цель изобретения - повышение быстродействия системы автоматической оптимизации.
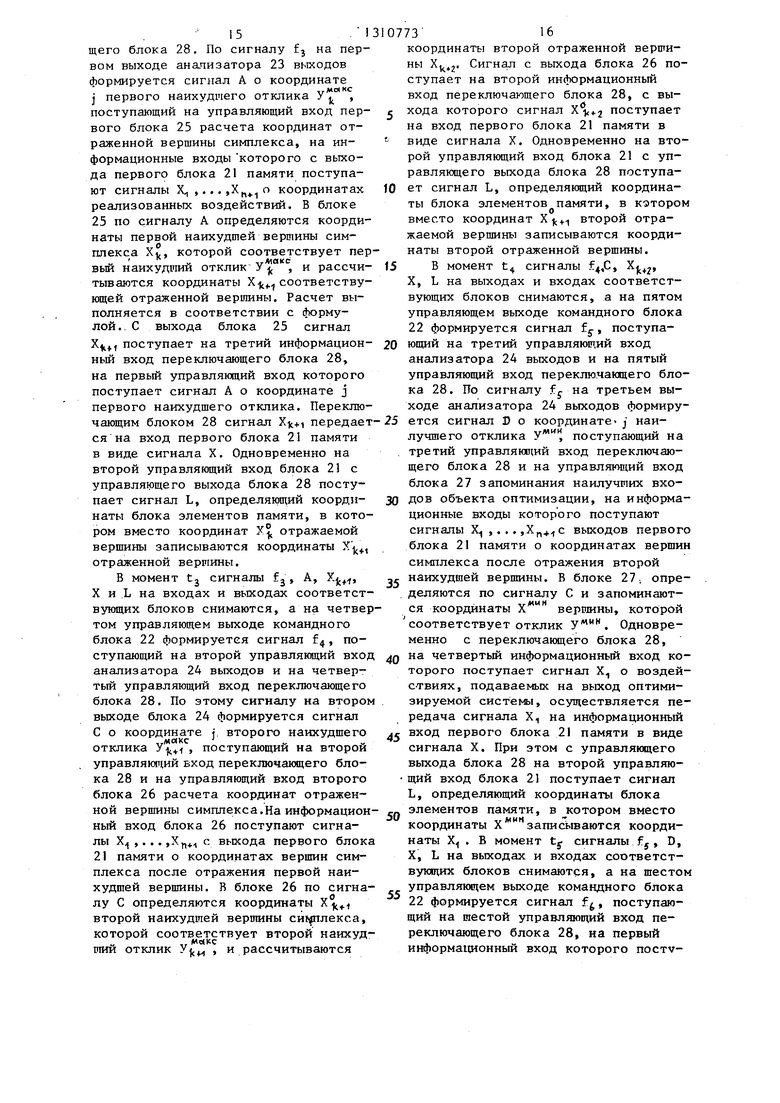
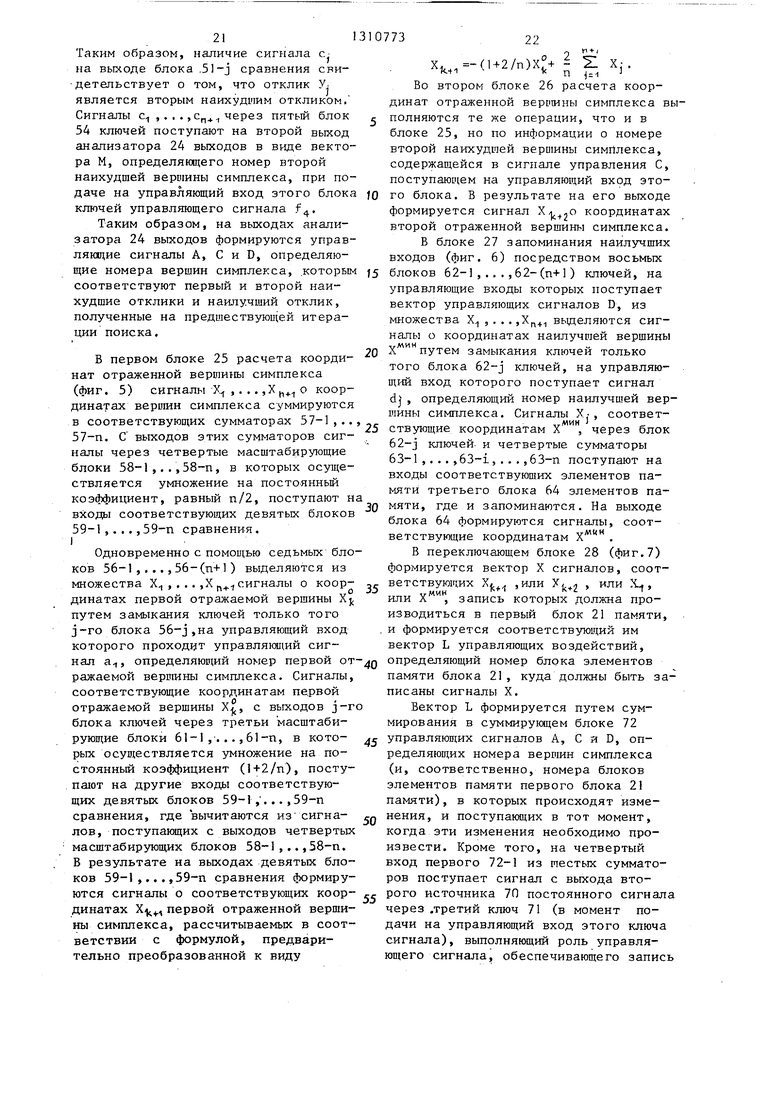
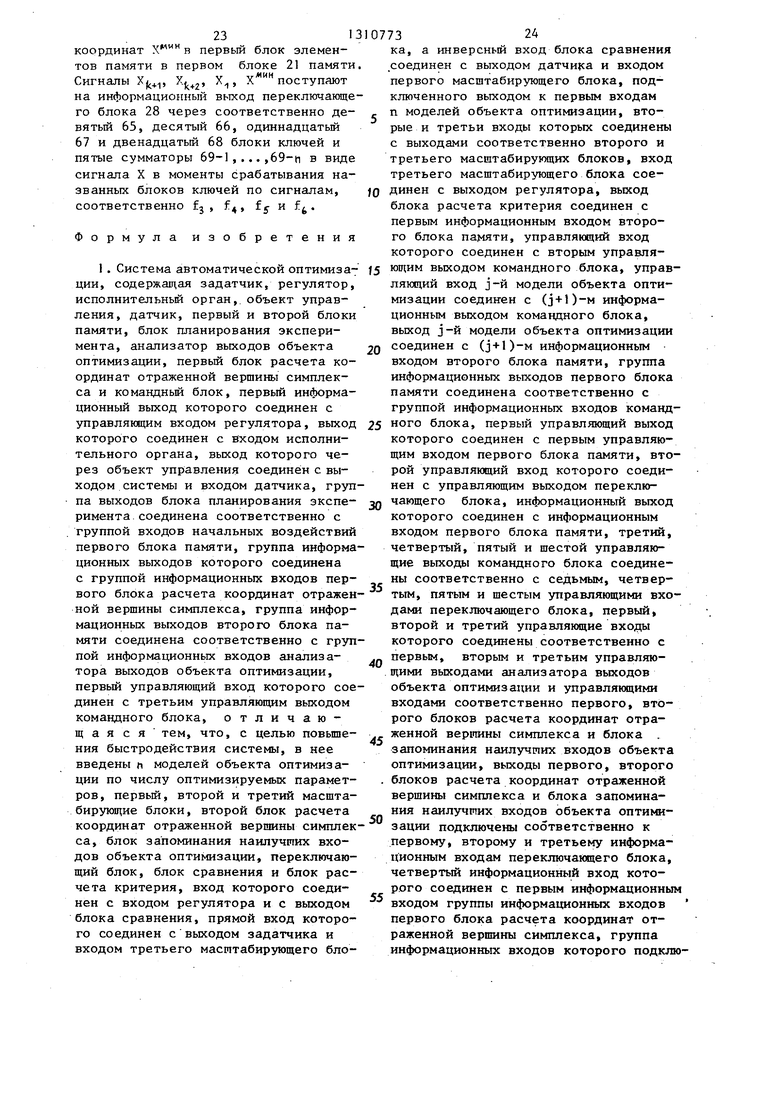
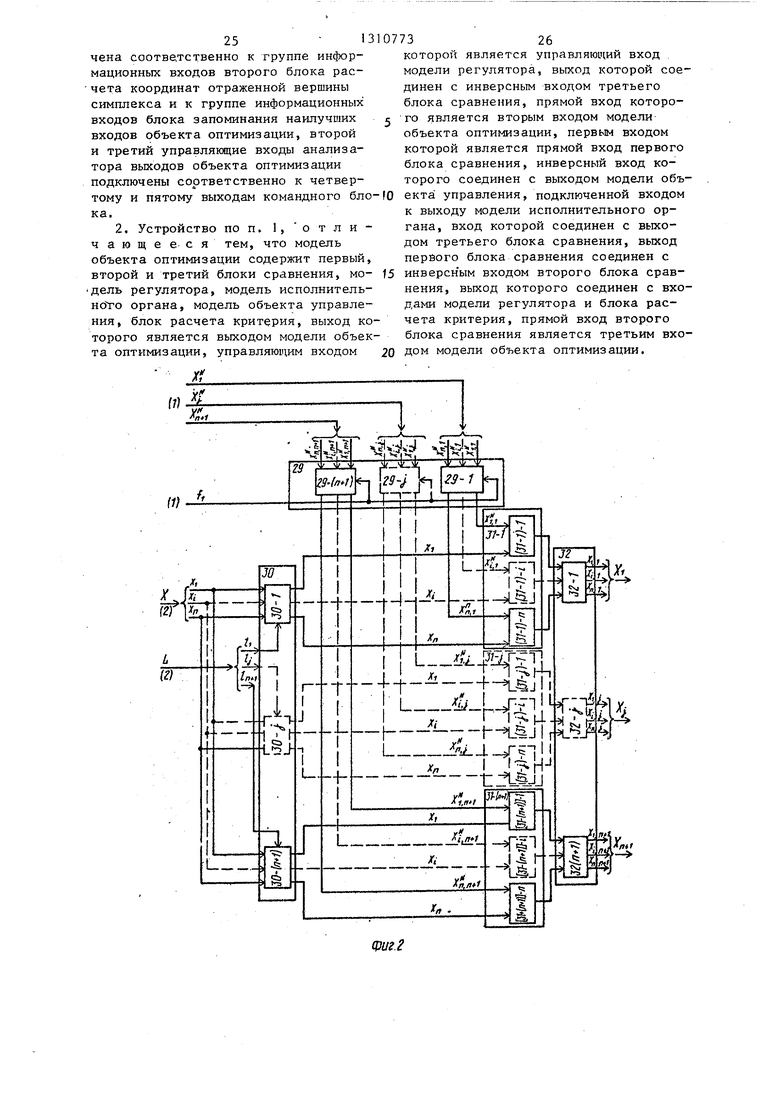
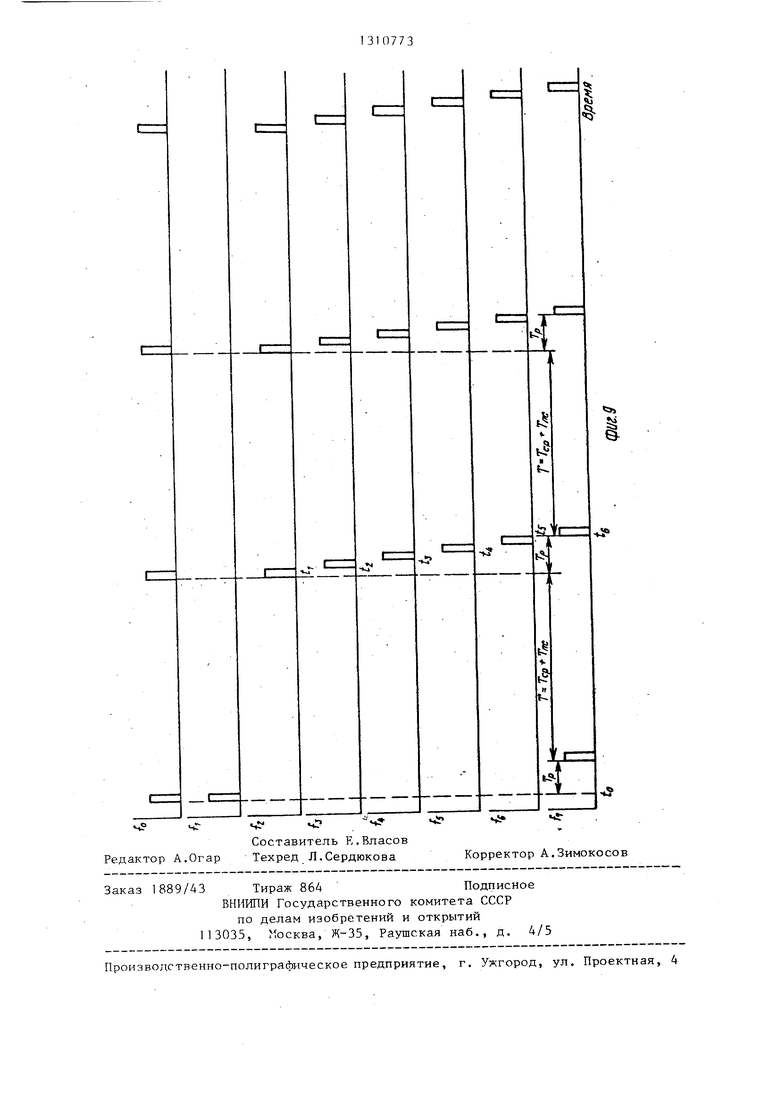
На фиг. 1 изображена блок-схема системы автоматической оптимизации; на фиг. 2 - блок-схема первого блока памяти; на фиг. 3 - блок-схема командного блока; на фиг. 4 - блок-схема анализатора выходов объекта оптимизации; на фиг. 5 - блок-схема первого и второго блоков расчета координат отраженной вершины симплекса; на фиг. 6 - блок-схема блока запоминания наилучших входов объекта оптимизации; на фиг. 7 - блок-схема переключающего блока; на фиг. 8 - траектории движения симплекса в предлагаемой системе (а) и в системе-прототипе (б); на фиг. 9 - временные диаграммы формирования управлякяцих сигналов командным блоком.
Система автоматической оптимизации (фиг. 1) содержит обтэект 1 оптимизации, включающий задатчик 2, блок
310773
вующие всем без исключения вершинам симплекса, обновляя тем ca rьiм информацию об откликах оптимизируемого объекта. В условиях дрейфа экстремума статических характеристик оптимизируемого объекта, в частности системы регулирования, обусловленного изменениями свойств, это позволяет исключить ошибочные решения при выборе и отражении наихудших верпин, ускоряя отслеживание дрейфа экстремума, а на кажл,ой итерации поиска производить отражение не одной, а двух наихудггих вершин симплекса, сокращая тем самым число итераций, необходимых для определения оптимального воздействия. 9 ил., 1 з.п. (h-лы.
5
3 сравнения, регулятор 4, исполнительный орган 5, объект 6 управления, датчик 7 и блок 8 расчета критерия , модели 9-1 , , . . , 9-j , . . ,, 9-п объ- екта оптимизации в количестве п, соответствующем количеству оптимизируемых параметров (входных воздействий) объекта оптимизации, состоящие из блоков 10-1,...,0-J,...,0-п сравнения, блоков 11 -1,. . .,11 -j, . . ., 11-п сравнения, моделей 12-1,..., 12-J,...,12-п регулятора, блоков 13-1,.,.,3-J,...,3-п сравнения, моделей 1 4-1 , . , . , 1 4-j ; ..., 4-п ис- . полнительного органа, моделей 15-1,.., 15-J , . . .,15-п объекта управления и блоков 16-1,...,6-J,...,6-п расчета критерия, а также масштабиругацие блоки 17-19, блок 20 планирования эксперимента, блок 21 памяти, командный блок 22, блок 23 памяти, анализатор 24 выходов объекта оптимизации, блоки 25 и 26 расчета координат от- раженной вершины симплекса, блок 27 запоминания наилучших входов объекта оптимизации и переключающий блок 28.
Первый блок 2,1 памяти (фиг. 2) содержит первый коммутирующий блок
29,состоящий из первых блоков клю- 0 чей в количестве (п+) с 29-Г по 29(п+1), второй коммутирующий блок
30,состоящий из вторых блоков ключей в количестве (п+1) с 30-1 по 300
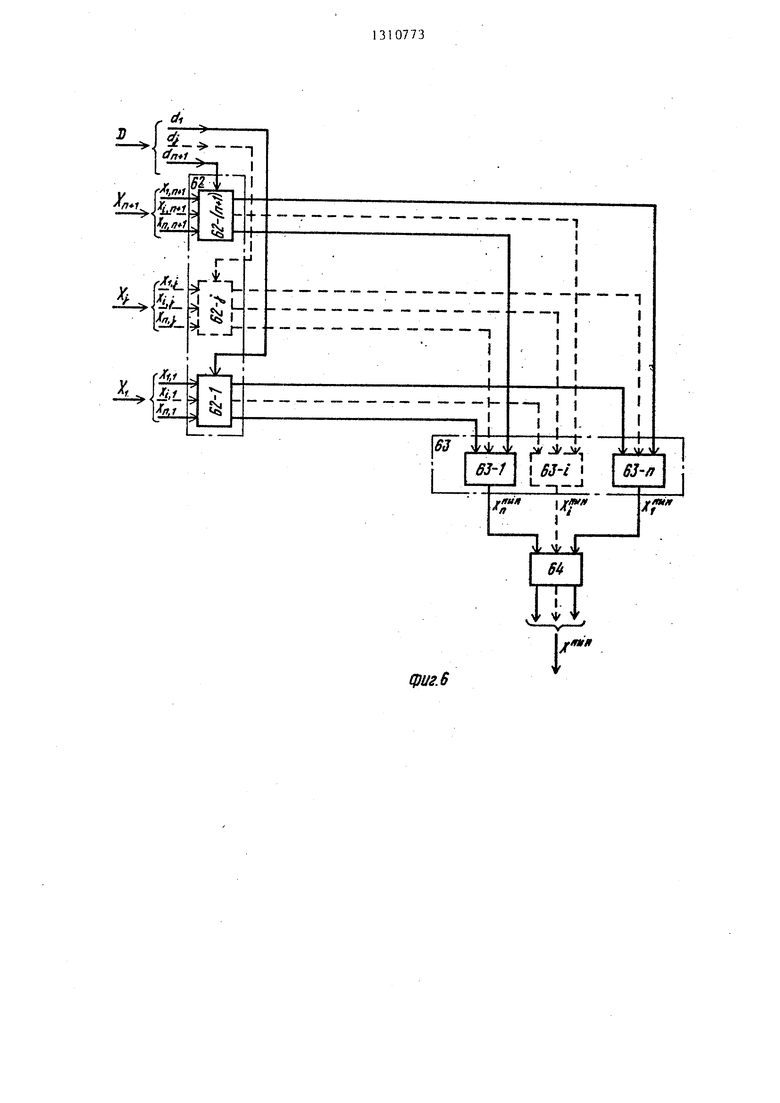
ве n с 60-1 по 60-п, и третий суммирующий блок 61, состоящий из сумматоров в количествеn с 61-1 по 61-п. Блок 27 запоминания Наилучших, входов объекта оптимизации (фиг.6) содержит восьмой коммутирующий блок
62,состоящий из восьмых блоков ключей в количестве (п+1) с 62-1 по 62-(п+1), четвертьтй суммирующий блок.
63,состоящий из четвертых сумматоров в количестве n с 63-1 по 63-п,
и третий блок 64 элементов памяти.
Переключающий блок 28 (фиг. 7) содержит девятый 65, десятый 66, 5 одиннадцатый 67 и двенадцатый 68 блоки ключей, пятый суммирукядий блок 69, состоящий из пятых сумматоров в количестве n с 69-1 по 69-п, последовательно соединенные второй источfO
(п+1), первые суммирующие блоки 31-1,.,.,31-j,...,31-(п+1) в количестве (п+1), каждый из которых содержит первые сумматоры в количестве
n с (ЗЫ)-1 по (31-1)-пс
(31-j)-l по (31-j)-n,..., с 31-(п+ +)- по 31-(п+1)-п, первый запоминающий блок 32, состоящий из первых блоков элементов памяти в количестве (п+1) с 32-1 по 32-(п+1), каждый из которых, в свою очередь, состоит из п элементов памяти.
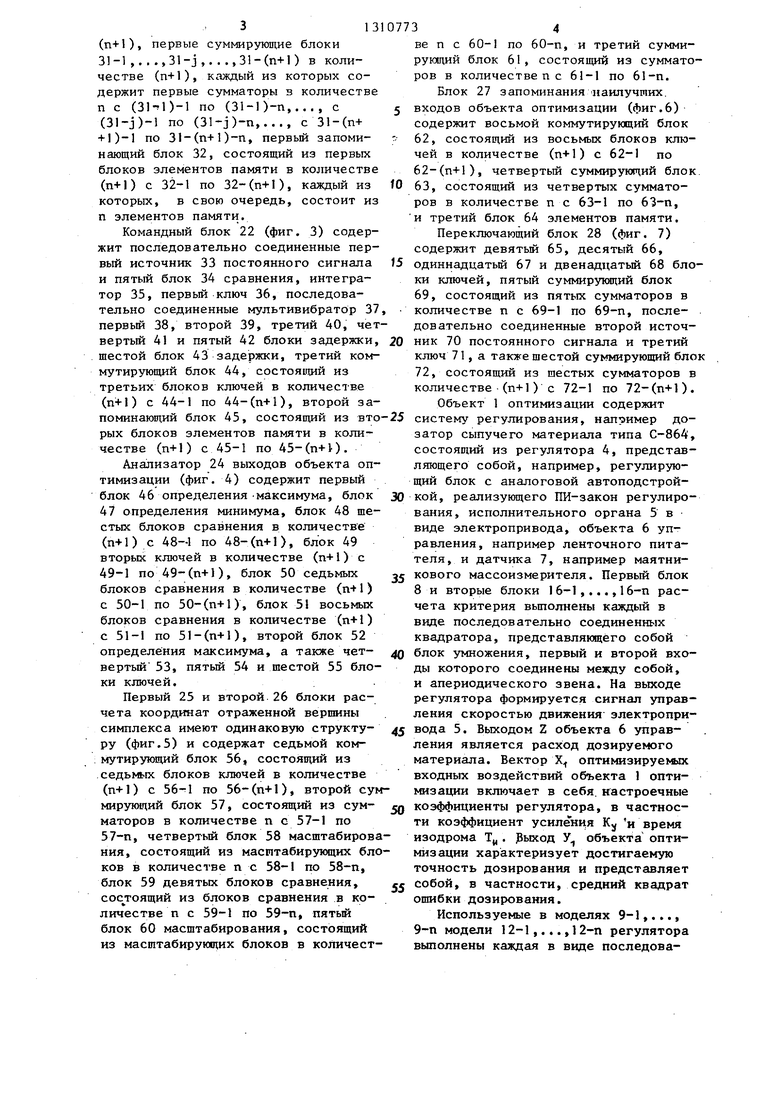
Командный блок 22 (фиг. 3) содержит последовательно соединенные первый источник 33 постоянного сигнала и пятый блок 34 сравнения, интегратор 35, первьй ключ 36, последовательно соединенные мультивибратор 37, первый 38, второй 39, третий 40, четвертый 41 и пятый 42 блоки задержки, 20 ник 70 постоянного сигнала и третий шестой блок 43 задержки, третий ком- ключ 71, а также щестой суммирующий блок мутирующий блок 44, состоящий из третьих блоков ключей в количестве (п+1) с 44-1 по 44-(п+1), второй запоминающий блок 45, состоящий из вто-25 систему регулирования, например до- рых блоков элементов памяти в коли- затор сыпучего материала типа С-864, честве (п+1) с 45-1 по 45-(п+1 ).
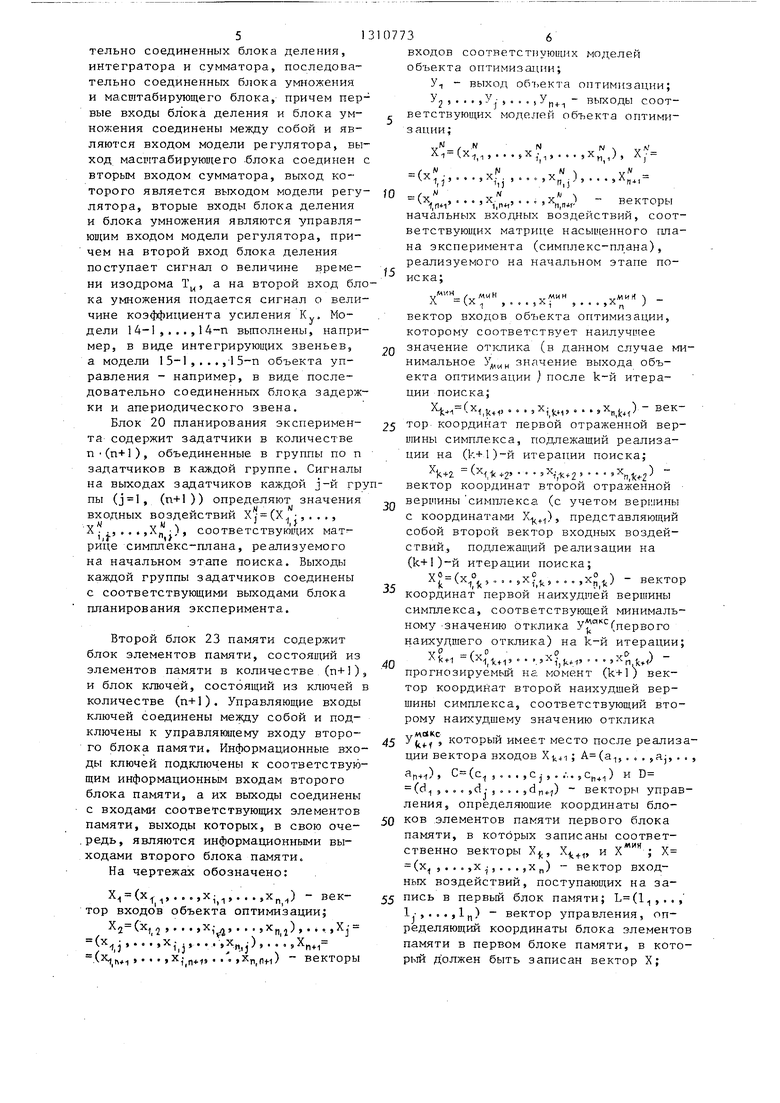
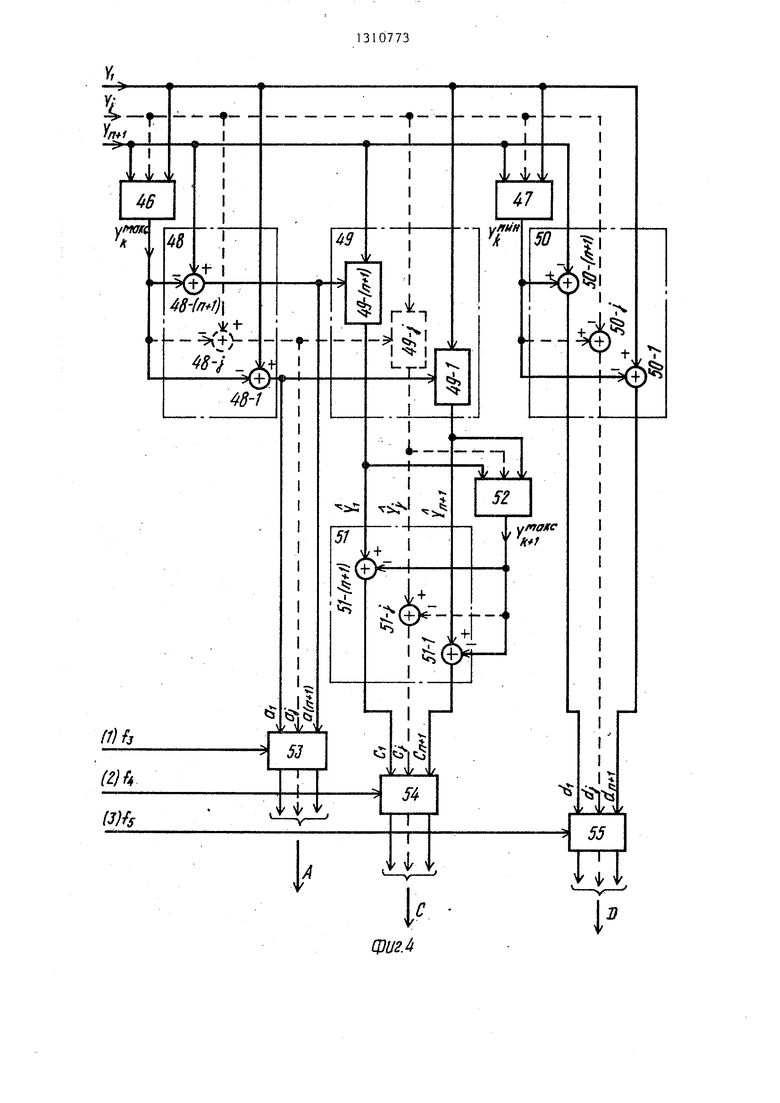
Анализатор 24 выходов объекта оптимизации (фиг. 4) содержит первый блок 46 определения-максимума, блок 47 определения минимума, блок 48 шестых блоков сравнения в количестве (п+1) с 48-1 по 48-(п+1), блок 49 вторых ключей в количестве (п+1) с 49-1 по 49-(п+1), блок 50 седьмых блоков сравнения в количестве (п+1) с 50-1 по 50-(п+1), блок 5 восьмых блоков сравнения в количестве (п+1) с 51-1 по 51-(п+1), второй блок 52 определения максимума, а также четвертый 53, пятый 54 и шестой 55 блоки ключей.
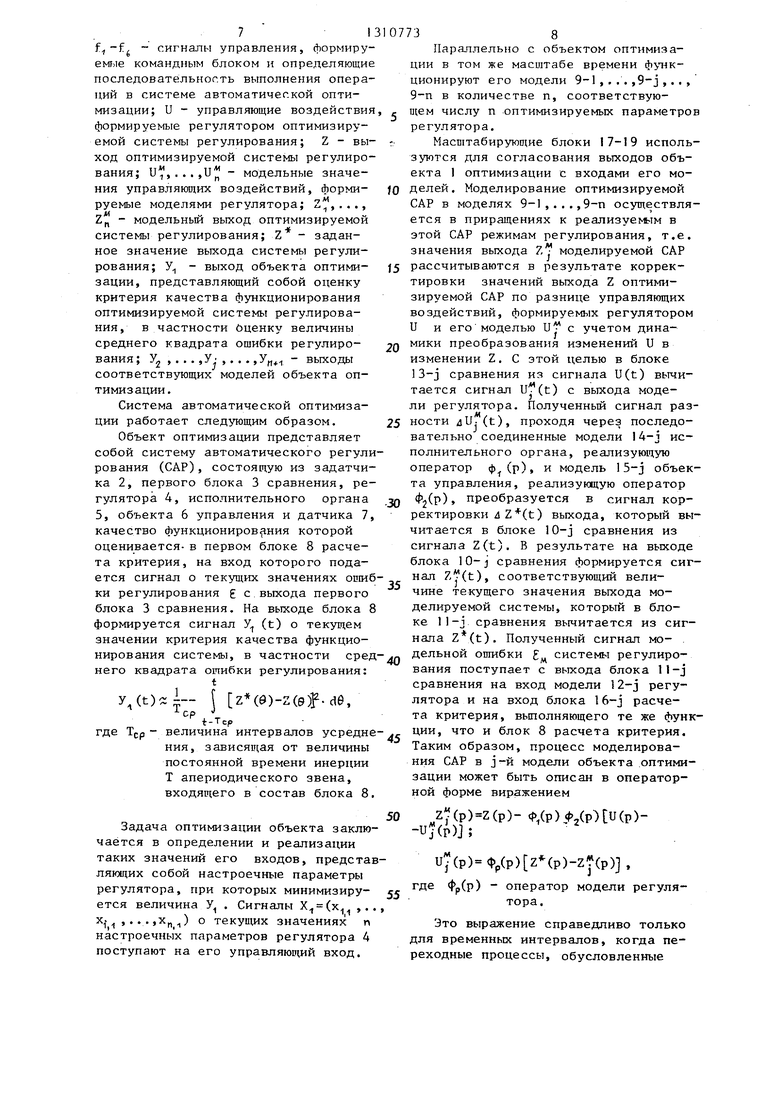
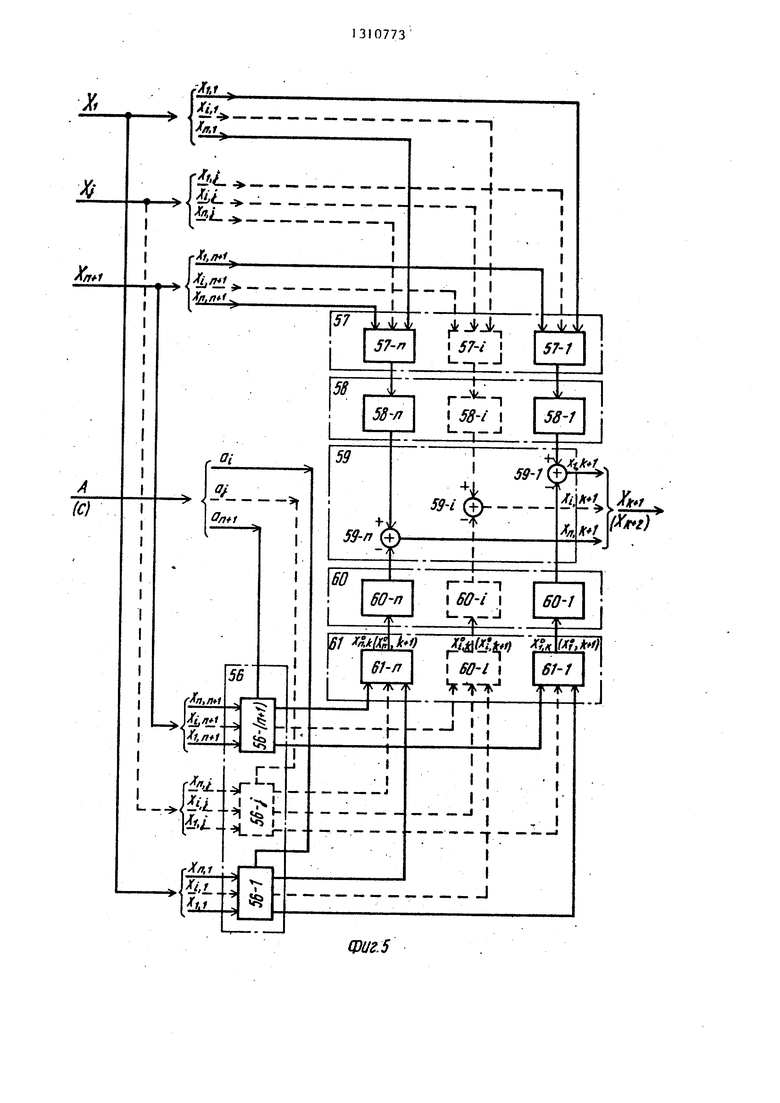
Первый 25 и второй 26 блоки расчета координат отраженной вершины симплекса имеют одинаковую структуру (фиг.5) и содержат седьмой ком- : Мутирующий блок 56, СОСТОЯЩИЙ из седьмых блоков ключей в количестве (п+1) с 56-1 по 56-(п+1), второй суммирующий блок 57, состоящий из сум- коэффициенты регулятора, в частнос- маторов в количестве n с 57-1 по ти коэффициент усиления К и время 57-п, четвертый блок 58 масштабирования, состоящий из масштабирующих блоков в количестве n с 58-1 по 58-п,
72, состоящий из шестых сумматоров в количестве (п+1) с 72-1 по 72-(п+1). Объект 1 оптимизации содержит
состояв1ий из регулятора 4, представляющего собой, например, регулирующий блок с аналоговой автоподстрой-
30 кой, реализующего ИИ-закон регулирования, исполнительного органа S в виде электропривода, объекта 6 управления , например ленточного питателя, и датчика 7, например маятни35 кового массоизмерителя. Первый блок 8 и вторые блоки 16-1,...,16-п расчета критерия вьшолнены каждый в виде последовательно соединенных квадратора, представляющего собой
40 блок умножения, первый и второй входы которого соединены между собой, и апериодического звена. На выходе регулятора формируется сигнал управления скоростью движения электропри45 вода 5. Выходом Z объекта 6 управления является расход дозируемого материала. Вектор X., оптимизируемых входных воздействий объекта 1 оптимизации включает в себя, настроечные
изодрома Ту. РЫХОД У объекта оптимизации характеризует достигаемую точность дозирования и представляет 55 собой, в частности, средний квадрат ошибки дозирования.
блок 59 девятых блоков сравнения, сос гоящий из блоков сравнения в количестве n с 59-1 по 59-п, пятый блок 60 масштабирования, состоящий из масштабирующих блоков в количест07734
ве n с 60-1 по 60-п, и третий суммирующий блок 61, состоящий из сумматоров в количествеn с 61-1 по 61-п. Блок 27 запоминания Наилучших, входов объекта оптимизации (фиг.6) содержит восьмой коммутирующий блок
62,состоящий из восьмых блоков ключей в количестве (п+1) с 62-1 по 62-(п+1), четвертьтй суммирующий блок.
63,состоящий из четвертых сумматоров в количестве n с 63-1 по 63-п,
и третий блок 64 элементов памяти.
Переключающий блок 28 (фиг. 7) содержит девятый 65, десятый 66, 5 одиннадцатый 67 и двенадцатый 68 блоки ключей, пятый суммирукядий блок 69, состоящий из пятых сумматоров в количестве n с 69-1 по 69-п, последовательно соединенные второй источfO
20 ник 70 постоянного сигнала и третий ключ 71, а также щестой суммирующий блок 25 систему регулирования, например до- затор сыпучего материала типа С-864,
ник 70 постоянного сигнала и третий ключ 71, а также щестой суммирующий блок систему регулирования, например до- затор сыпучего материала типа С-864,
72, состоящий из шестых сумматоров в количестве (п+1) с 72-1 по 72-(п+1). Объект 1 оптимизации содержит
ник 70 постоянного сигнала и третий ключ 71, а также щестой суммирующий блок систему регулирования, например до- затор сыпучего материала типа С-864,
коэффициенты регулятора, в частнос- ти коэффициент усиления К и время
состояв1ий из регулятора 4, представляющего собой, например, регулирующий блок с аналоговой автоподстрой-
кой, реализующего ИИ-закон регулирования, исполнительного органа S в виде электропривода, объекта 6 управления , например ленточного питателя, и датчика 7, например маятникового массоизмерителя. Первый блок 8 и вторые блоки 16-1,...,16-п расчета критерия вьшолнены каждый в виде последовательно соединенных квадратора, представляющего собой
блок умножения, первый и второй входы которого соединены между собой, и апериодического звена. На выходе регулятора формируется сигнал управления скоростью движения электропривода 5. Выходом Z объекта 6 управления является расход дозируемого материала. Вектор X., оптимизируемых входных воздействий объекта 1 оптимизации включает в себя, настроечные
коэффициенты регулятора, в частнос- ти коэффициент усиления К и время
изодрома Ту. РЫХОД У объекта опти коэффициенты регулятора, в частнос- ти коэффициент усиления К и время
мизации характеризует достигаемую точность дозирования и представляет 55 собой, в частности, средний квадрат ошибки дозирования.
Используемые в моделях 9-1,. ..,
9-п модели 12-112-п регулятора
выполнены каждая в виде последова51тельно соединенных блока деления, интегратора и сумматора, последовательно соединенных блока умножения и масштабирующего блока, причем первые входы бл ока деления и блока умножения соединены между собой и являются входом модели регулятора, выход масштабирующего .блока соединен с вторым входом сумматора, выход которого является выходом модели регулятора, вторые входы блока деления и блока умножения являются управляющим входом модели регулятора, причем на второй вход блока деления поступает сигнал о величине времени изодрома Т, а на второй вход блока умножения подается сигнал о величине коэффициента усиления К„. Модели 14-114-п выполнены, например, в виде интегрирующих звеньев, а модели 1 5-1 , , .. ,-1 5-п объекта управления - например, в виде последовательно соединенных блока задержки и апериодического звена.
Блок 20 планирования эксперимента содержит задатчики в количестве П (п+1), объединенные в группы по п задатчиков в каждой группе. Сигналы на выходах задатчиков каждой j-й гру пы (, (п+1)) определяют значения входных воздействий Х{(Х,,...,
WКI }
X ..,.,.,Х„ ), соответствующих матрице симплекс-плана, реализуемого на начальном этапе поиска. Выходы каждой группы задатчиков соединены с соответствующими выходами блока планирования эксперимента.
Второй блок 23 памяти содержит блок элементов памяти, состоящий из элементов памяти в количестве (п+1) и блок ключей, состоящий из ключей в количестве (п+1). Управляющие входы ключей соединены между собой и подключены к управляющему входу второго блока памяти. Информационные входы ключей подключены к соответствующим информационным входам второго блока памяти, а их выходы соединены с входами соответствующих элементов памяти, выходы которых, в свою оче- .редь, являются информационными выходами второго блока памяти. На чертежах обозначено:
Х (х,. . .,Х ,. . .,х,) - вектор входов объекта оптимизации;
2 ,1 П|1- J
(х
ij ° , j 9 П+1
(,,, ./. ,x(H.i) - векторы
3. 6
входов соответстнующнх моделей объекта оптимизации;
YI - выход об1,екта оптимизации; Yj , . . , ,У,|- S . . . sY - выходы соот- ветствующих моделей объекта оптими- 3 ации;
/... ,.N ..N V v л-I i,x , . . . , X j , . . . , , Aj ( . x v x - vx , . . . ,x... , . . . ,X|j. j , . . . ,л„, („,, X J . . х„%,) - векторы начальных входных воздействий, соответствующих матрице насы11(енного плана эксперимента (симплекс-плана), реализуемого на начальном этапе по
иска;
X (х ;
мм и
,мик
)
0
5
0
5
вектор входов объекта оптимизации, которому соответствует наилучшее Q значение отклика (в данном случае минимальное Уд, значение выхода объекта оптимизации ) после k-й итерации цоиска;
, ° ,(cMs си 5 тор координат первой отраженной вершины симплекса, подлежащий реализации на (.+ 1)-й итерации поиска;
(.+г 1,1 Ч-2 з - -к+г 1c4-2 вектор координат второй отраженной
веришны симплекса (с учетом вериганы с координатами Х), представляющий собой второй вектор входных воздействий, подлежащий реализации на (k+l)-й итерации цоиска;
Х(,.. . , ,,.,х°) - вектор
координат первой наихудшей вершины симплекса, соответствующей минимальному -значению отклика (первого наихудшего отклика) на k-й итерации;
(v°л- vO 1,1.-1 - . - I lKfi ° k+f- прогнозируемьш на момент (k+l) вектор координат второй наихудшей вершины симплекса, соответствующий второму наихудшему значению отклика
,,«CJKC
У , который имеет место после реализации вектора входов ; A(ai5 . . . ,aj, . . , ), С(с , . . . ,с,|-, . ...,С|,,) и D (d 5... ,d , о . . ,d.j) - векторы управления, определяющие координаты бло0 ков .элементов памяти первого блока памяти, в которых записаны соответственно векторы Х|,, X., и ; Х (х , . . , ,x.j, . . . ,х„) - вектор входных воздействий, поступающих на за5 пись в первый блок памяти; L(l,.., 1 ,...,1) - вектор управления, определяющий координаты блока элементов памяти в первом блоке памяти, в который должен быть записан вектор X;
- сигналы управления, формируемое командным блоком и определяющие последовательног.ть выполнения операций в системе автоматической оптимизации; и - управляющие воздействия формируемые регулятором оптимизируемой системы регулирования; Z - вы- ход оптимизируемой системы регулирования; и1 ,...,и - модельные значения управляюв1их воздействий, форми- руемые моделями регулятора; Z,..., Z - модельный выход оптимизируемой системы регулирования; Z - заданное значение выхода системы регулирования; У - выход объекта оптими- зации, представляющий собой оценку критерия качества функционирования оптимизируемой системы регулирования, в частности Оценку величины среднего квадрата ошибки регулиро- вания; У ,. , . ,Уу ,. . . ,У„ - выходы соответствующих моделей объекта оптимизации.
Система автоматической оптимизации работает следующим образом.
Объект оптимизации представляет собой систему автоматического регулирования (САР), состоящую из задатчи- ка 2, первого блока 3 сравнения, регулятора 4, исполнительного органа 5, объекта 6 управления и датчика 7, качество функционирования которой оценивается- в первом блоке 8 расчета критерия, на вход которого подается сигнал о текущих значениях отиб ки регулирования с выхода первого блока 3 сравнения. На выходе блока 8 формируется сигнал У (t) о текущем значении критерия качества функционирования системы, в частности среднего квадрата ошибки регулирования:
t
y(t) ( z(e)-Z(9f-d0,
Р . г t-Tcp
где Тер- величина интервалов усредне ния, зависящая от величины постоянной времени инерции Т апериодического звена, входящего в состав блока 8,
Задача оптимизации объекта заключается в определении и реализации таких значений его входов, представляющих собой настроечные параметры регулятора, при которых минимизиру- ется величина У . Сигналы Х (х ,. X,. ,.. , ,х„) о текущих значениях п настроечных параметров регулятора 4 поступают на его управляющий вход.
Параллельно с объектом оптимизации в том же масштабе времени функционируют его модели 9-1,. . . ,9-j ,. . , 9-п в количестве п, соответствующем числу п оптимизируемых параметро регулятора.
Масштабирующие блоки 17-19 используются для согласования выходов объекта I оптимизации с входами его моделей. Моделирование оптимизируемой САР в моделях 9-1,...,9-п осуществляется в приращениях к реализуемым в этой САР режимам регулирования, т.е. значения выхода 7. моделируемой САР рассчитываются в результате корректировки значений выхода Z оптимизируемой САР по разнице управляющих воздействий, формируемых регулятором и и его моделью U с учетом динамики преобразования изменений U в изменении Z. С этой целью в блоке 13-J сравнения из сигнала U(t) вычитается сигнал U(t) с выхода модели регулятора. Полученный сигнал разности dU-(t), проходя через последовательно соединенные модели 14-j исполнительного органа, реализующую оператор ф(р), и модель 15-j объекта управления, реализукщую оператор Ф2(р), преобразуется в сигнал корректировки 4 Z(t) выхода, который вычитается в блоке 10-j сравнения из сигнала Z(t). В результате на выходе блока 1 О-j сравнения формируется сит- нал Z(t), соответствующий величине текущего значения выхода моделируемой системы, который в блоке 11 -i сравнения вычитается из сигнала Z(t). Полученный сигнал модельной ошибки системы регулирования поступает с выхода блока 11-j сравнения на вход модели 12-j регулятора и на вход блока 16-j расчета критерия, выполняющего те же функции, что и блок 8 расчета критерия. Таким образом, процесс моделирования САР в j-й модели объекта оптимизации может быть описан в операторной форме виражением
Z(p)Z(p)- с(р)ф(р)и(р)-u(p)J;
U(p)({.p(p)z(p)-Zj(p).
где Фр(р) - оператор модели регулятора.
Это выражение справедливо только для временных интервалов, когда переходные процессы, обусловленные
изменениями параметров регулятора, завершены. На выходе блока 16-j формируется сигнал о текущем значении критерия качества функционирования
моделируемой САР t
y,(t) ( Z.(e)-Z7(9), icp J
fc-Tcp
являющийся выходом модели 9-j оптимизируемого объекта.
,Х;
,Р
Сигналы Х; (х ,..., ,...,. о текущих значениях настроечных параметров модели 12-j регулятора поступают на ее управлянлдий вход.
Благодаря использованию сигналов и, Z и Z оптимизируемой САР в моделях оптимизируемой системы полностью воспроизводятся условия работы оптимизируемой САР, т.е. в моделируемых системах воспроизводятся те же не- контролируемые возмуи1ающие воздействия и воздействия по задающему входу, влиянию которых подвержена оптимизируемая САР. Так как моделирование в моделях 9-1,...,9-п осуще- ствляется в приращениях к реализуемым в оптимизируемой САР режимам и
М
диапазон изменений 4Uj сравнительно невелик, то динамика преобразований
весьма точно описывается
Г -J
простыми линейными операторами, реализуемыми в модели 14-J исполнительного органа и модели 15-j объек тй управления. Таким образом, если параметры объекта 6 управления меняются очень медленно (что в реальных системах регулирования технологических процессов, например, в металлургии не является редкостью),модели 14-J и 15-J в период оптимизации сохраняют свою адекватность,а дрейф экстремума характеристик оптимизируемой САР обусловлен изменениями свойств действующих на нее возмущений, то модели 9-,..,,9-п обеспечивают адекватное воспроизведение режимов реально функционирующего оптимизируемого объекта. Это значит, что любому из воздействий Х;, реализованному в модели объекта оптимизации, соответствует отклик У- тако же, какой был бы получен в реальном объекте оптимизации при реализации в нем этого воздействия.
При наличии дрейфа экстремума характеристик объекта оптимизации ха- рактер откликов У- на воздействия i j-l (n+1) ,соответствукяцие вершинам симплекса, может существенно
o
о 5
0
меняться. Этот факт в обычной процедуре симплекс-метода поиска экстре- : мума не учитывается, и выбор наихудшей (отражаемой) вершины производится в предположении, что значения откликов на реализованные ранее воздействия сохранились на прежних уровнях. В результате - не.соответствующие действительности решения по определению наихудшей вершины симплекса, выбор неверного направления движения симплекса и замедление всей процедуры оптимизации. Для устранения этого недостатка необходимо на каждой операции поиска уточнять информацию об отютиках У- на воздействия Х- по всем вершинам симплекса. Выполнить это условие при реализации воздействий только на объекте оптимизации невозможно. Однако,благодаря введению в систему автоматической оптимизации моделей 9-1,...,9-п объекта 1 оптимизсщии в количестве п эта проблема ревшется, так как на каждой итерации поиска реализуются воздействия, соответствующие всем (п+1) вершинам симплекса: из командного блока 22 Х поступает на вход объекта оптимизации, а Х2,...,Х-,.., Х|, одновременно с X поступают на входы соответствующих моделей. 9-1,.., 9-(J-1),...,9-п. Получаемые на объекте оптимизации и на его моделях отклики У.
5
0
5
0
5
1
,У одновременно фиксируются во втором блоке 23 памяти.
При реализации воздействий, соответствующих координатам отраженной вершины симплекса, на объекте оптимизации могут возникнуть серьезные нарушения в функционировании объекта оптимизации. Во избежание этого в предлагаемой системе предусматривается реализация воздействий, соответствующих координатам отражаемой вершины, только на моделях объекта оптимизации. На объекте оптимизации на каждой последующей итерации поиска реализуются воздействия Х, соответствующие координатам Х наилучшей вершины симплекса (т.е. той, которой соответствует наилучший отклик, в частности, ) определенной по результатам предшествующей итерации поиска,
В рассматриваемой системе автоматической оптимизации на каждой последующей итерации поиска реализуется не только воздействие Х., определяемое в процессе отражения первой наихудшей вершины Хц;, найденной по результатам предшествующей итерации, но прогнозируется и отражается наихудшая из с вершин X симплекса (вторая наихудшая вершина), которой соответствует : наихудшее значение отклика У после реализации воздействия -j. Сущ- ность такого прогнозирования заклю- jg чается в предположении, что отклик, соответствующий Xj,, полученный после его реализации, окажется не самым худшим из множества откликов, соответствующих вершинам симплекса.
15
Таким образом, в качестве наихудшей вершины Х принимается вершина, которой соответствует наихудший ..макс
t+i
из множества откликов У,
1
У:,...,У„, полученного после исключения из множества У, , .. . ,У,- , . .. ,У..
макс
отклика У
Координаты второй отраженной вершины определяются по формуле
у + J у
ьг х. п tr, Ч.
, ,tk. (1,
Ht
..
- множество вершин симплекса после отражения вершины Х, за исключением прогнозируемой- наихудшей вершины
ы-
Оба воздействия -Х| и Х одновременно реализуются в моделях объекта оптимизации на последующей итерации поиска. Таким образом, на каждой итерации поиска осуществляется отражение не одной, а двух вершин симплеса, что приводит к существенному ускорению процедуры поиска.
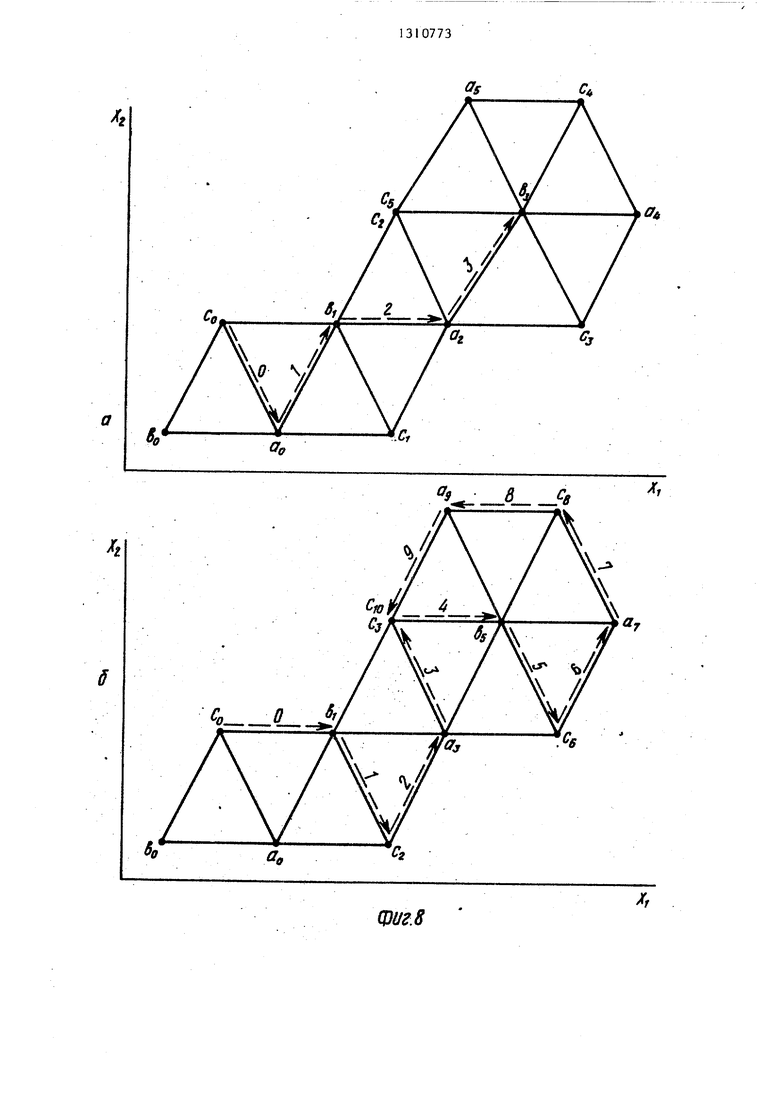
Сущность описанной процедуры отражения вершин симплекса и реализации воздействий, соответствующих этим вершинам, может быть наглядно пояснена для случая оптимизации системы с пи-регулятором. Множество оптимизируемых входов системы включает в себя два настроечных параметра регулятора, а именно коэффициент усиления Ку и время изодрома Тц, т.е. , Х(х,,х), х,К,, . Пример графика движения симплекса для этого случая изображен на фиг. 8ее (дрейф экстремума характеристик объекта оптимизации отсутствует.
После реализации исходного симплекс-плана, соответствующего вершинам bj), C(j (причем воздействия.
с : g 15
0
5
40
эл
45
50
55
соответствующие вершинам а и Ъ, реализованы на моделях объекта оптимизации, а воздействия, соответствующие вершине Сд, реализованы на объекте оптимизации) получены отклики У(ар), У(Ь(,) и У(СО), характеризующие ошибку регулирования, причем У (bo) 7 у(ср) у(ао).
На первой итерации поиска отражаются вершина симплекса а, Ь, Ср и вершина с симплекса a,,. Со, Ь. Настроечные параметры х и Х2, соответствующие вершинам Ь и с вновь сформированного симплекса а, Ь, с реализуются в моделях оптимизируемой системы, а параметры, соответствующие вершине а, - в регуляторе оптимизируемой системы, так как в симплексе а, Ь, Ср вершине а соответствует наилучший отклик. Пунктирными стрелками на фиг. 8а отмечена последовательность изменения параметров настройки регулятора оптимизируемой системы. Цифры возле этих стрелок указьшают номер итврации поиска, после которой осуществляется изменение настроек регулятора оптимизируемой системы. После реализации симплекса а, Ь, с получены отклики у(а5) 7 уСсО y(bi).
На второй итерации поиска отражаются вершина , симплекса а, Ь, Ci и вершина симплекса Ь , с , а„. Параметры, соответствукнцие вершинам а и Cj вновь сформированного симплекса Ц, а, с, реализуются на моделях оптимизируемой системы, в регуляторе оптимизируемой систеьф реализуются параметры, соответствукнцие вершине Ь. После реализации симплекса Ь, а2, Cj получены отклики у(Ь)- (с2) -ууСаа).
На третьей итерации поиска отражаются вершина Ь ъ симплекса Ь, а2 С2 и вершина симплекса а, с j bj. Параметры, соответствующие вершинам bj и с вновь сформироваииого симплекса а, Ь, Cj, реализуются в моделях системы, а параметры, соответствующие вершине а - в регуляторе оптимизируемой системен. После реализации симплекса а, bj, с получены отклики у (а г) У (Сд ) У (Ьз )
На четвертой итерации поиска отражаются вершина симплекса а, Ь, Cj и вершина симплекса bj, Cj, а. Параметры, соответствукнцие вершине bj вновь сформирован- иого симплекса Ь, а4, с., реализу131310773
ются в регуляторе оптимизируемой сие- X темы, а параметры, соответствующие вершинам а и с, - в моделях системы. После реализации симплекса
14
, На фиг, 9 изображены диаграммы, отражающие динамику этих сигналов.
Сигнал f формируется однократно только в момент tg запуска системы
с автоматической оптимизации. По этому сигналу в первом блоке 21 памяти производится запись в блоки элементов памяти сигналов о начальных вход- ньсх воздействиях , . . . ,,
fO поступающих на его вход с выхода блока 20 планирования эксперимента и
Ц, а4, С4 получены отклики уСа) У(С4) У(ЬЗ).
На пятой итерации поиска отражаются вершина ,. симплекса Ъ , а, С4 и вершина (. симплекса bg , с., а-t Входные воздействия регулятора оптимизируемой системы не меняются. Его параметры по-прежнему соответст- соответствующих матрице насьш1енно- вуют вершине bj. Параметры, соответ- го плана эксперимента (симплекс-пла- ствующие остальным вершинам симплек- на) , Эти сигналы с выхода первого са bj, Яе, Cj, реализуются в моделях ff блока 21 памяти поступают на вход оптимизируемой системы. После реали- командного блока, где в момент tg+Тр
по сигналу f-, записываются в соответствующие блоки элементов памяти и поступают с информационных выходов
Таким образом, на пятой итерации 20 командного блока в виде сигналов
Х , .... ,Х;,. , . jXf,,. на вход объекта оптимизации (сигнал Х) и на входы соответствующих моделей 9-1,...,9-п объекта оптимизации (сигналы Xj,..., Таким образом, на объзации симплекса Ь, а,- с получены отклики У (аg-} у У (с g) у(Ьз).
поиска в данном примере происходит зацикливание симплекса относительно вершины Ь, , параметры которой являются оптимальными и реализуются в регуляторе оптимизируемой системы на- 25 Xj,...,X чиная с четвертой итерации поиска. екте оптимизации в его моделях од- Для сравнения на фиг. 85изображе- повременно реаг изуются все воздей
на траектория движения симплекса и соответствующих изменений параметров регулятора оптимизируемой системы ре гулирования при использовании обычной процедуры симплекс-метода поиска, реализуемой, в частности, в системе-прототипе в тех же условиях. Как видно из фиг. 86, зацикливание симплекса относительно вершины с оптимальными параметрами (в данном случае вершина Ь) происходит только на девятой итерации поиска, т.е. только .на восьмой итерации поиска могут быть определены и реализованы в регуляторе оптимизируемой системы оптимальные параметры, в то время как в предлагаемой системе оптимальные параметры реализуются в регуля- торе начиная с четвертой итерации поиска.
В системе оптимизации процедуры отражения вершин симплекса формирова
ние воздействий Х,...,Хj,...,Х„,, 50 2А выходов. В этом блоке определяют- поступающих на входы объекта оптими- ся координаты ,n+l первого у эации и его моделей, осуществляется и второго пакхудшкх откликов следующим образом.
На управляющих выходах командного блока 22 формируются сигналы f.-f, определяющие последовательность всех операций в системе автоматической оптимизации, связанных с формированием воздействий Х,..,Х :,..
М.ИН
и наилучшего отклика У
В момент t сигнал f снимается,
55 а с выхода командного блока 22 на первый управляющий вход анализатора 24 вькодов поступает сигнал f,. Одновременно этот сигнал поступает на
. седьмой управляющий вход переключаю14
X
, На фиг, 9 изображены диаграммы, отражающие динамику этих сигналов.
Сигнал f формируется однократно только в момент tg запуска системы
автоматической оптимизации. По этому сигналу в первом блоке 21 памяти производится запись в блоки элементов памяти сигналов о начальных вход- ньсх воздействиях , . . . ,,
поступающих на его вход с выхода блока 20 планирования эксперимента и
соответствующих матрице насьш1енно- го плана эксперимента (симплекс-пла- на) , Эти сигналы с выхода первого блока 21 памяти поступают на вход командного блока, где в момент tg+Тр
. , и ую ти
из р
ствия, соответствугадие координатам
вершин симплекса.
По истечении времени Т, складывающегося из времени Т, , необходимого для завершения переходного процесса в объекте оптимизации и его моделях, обусловленного изменением
входных воздействий, и из времени , TCP усреднения при оценке показателей качества У , . . . ,У ,. , . ,У, функциоирования оптимизируемого объекта и его моделей, в момент t на выходе
блока 22 формируется сигнал f.. Этот сигнал поступает на управляющий вход второго блока 23 памяти, где в этот момент производится запись откликов
30
У-, (т«-1 объекта оптимизации и его 45 моделей на реализованные входные воздействия.
Сигналы об откликах У,...,У с информационных выходов блока 23 памяти поступают на входы анализатора
50 2А выходов. В этом блоке определяют- ся координаты ,n+l первого у и второго пакхудшкх откликов
50 2А выходов. В этом блоке определяют- ся координаты ,n+l первого у и второго пакхудшкх откликов
М.ИН
и наилучшего отклика У
В момент t сигнал f снимается,
55 а с выхода командного блока 22 на первый управляющий вход анализатора 24 вькодов поступает сигнал f,. Одновременно этот сигнал поступает на
. седьмой управляющий вход переключающего блока 28, По сигналу fj на первом выходе анализатора 23 вмходов
формируется сигнал А о координате
..макс j первого наихудшего отклика У ,
поступающий на управляющий вход первого блока 25 расчета координат отраженной вершины симплекса, на информационные входы которого с выхода первого блока 21 памяти поступают сигналы К, ,...,Х.о координатах реализованных воздействий. В блоке 25 по сигналу А определяются координаты первой наихудшей верпшны симплекса Х, которой соответствует первый наихудший отклик У jj, и рассчитываются координаты Х соответствующей отраженной вершины. Расчет выполняется в соответствии с формулой.. С выхода блока 25 сигнал
В момент t4 сигналы 4, Xj., X, L на выходах и входах соответст вующих блоков снимаются, а на пято управляющем выходе командного блок 22 формируется сигнал f, поступаХ,., поступает на третий информацион- 20 ющий на третий управлякщий вход ный вход переключающего блока 28, анализатора 24 выходов и на пятый на первый управляющий вход которого поступает сигнал А о координате j
управляющий вход переключающего бл ка 28. По сигналу f на третьем вы ходе анализатора 24 выходов формир
первого наихудшего отклика. Переключающим блоком 28 сигнал передает-25 ется сигнал D о координате j наися на вход первого блока 21 памяти в виде сигнала X. Одновременно на второй управляющий вход блока 21 с управляющего выхода блока 28 поступает сигнал L, определяющий координаты блока элементов памяти, в котором вместо координат Х отражаемой вершины записываются координаты Х , отраженной вершины.
В момент t J сигналы f , А, Х, X и L на входах и виходах соответствующих блоков снимаются, а на четвертом управляющем выходе командного блока 22 формируется сигнал f, поступаюпщй на второй управляющий вход о четвертый информационный вход ко- анализатора 24 выходов и на четвер- торого поступает сигнал Х о воздейтыи управляющий вход переключающего блока 28. По этому сигналу на втором выходе блока 24 формируется сигнал
С о координате i. второго наихудшего
млкс отклика , поступающий на второй
управляющий вход переключающего блока 28 и на управляющий вход второго блока 26 расчета координат отраженной вершины симплекса. На информацион- „элементов памяти, в котором вместо
JUlUUH
ный вход блока 26 поступают сигна-
лы X;, ,. .. ,Xj, с выхода первого блока 21 памяти о координатах вершин симплекса после отражения первой наихудшей вершины. В блоке 26 по сигналу С определяются координаты Х второй наихудшей вершины cи лeкca,
55
которой соответствует второй наихудU,г МсСКС
шии отклик У , и рассчитываются
координаты X записьгваются коорди наты Х . В момент tj- сигналы fj , D X, L на выходах и входах соответст вующих блоков снимаются, а на шесто управляющем выходе командного блок 22 формируется сигнал f, поступаю щий на шестой управляющий вход переключающего блока 28, на первый информационный вход которого nocTVкоординаты второй отраженной вершины . Сигнал с выхода блока 26 поступает на второй информационный вход переключающего блока 28, с выхода которого сигнал Х|(«.2 поступает на вход первого блока 21 памяти в
виде сигнала X. Одновременно на второй управляющий вход блока 21 с управляющего выхода блока 28 поступает сигнал L, определякнций координа-
ты блока элементов памяти, в кэтором вместо координат Xf..i второй отражаемой вершины записываются координаты второй отраженной вершины.
В момент t4 сигналы 4, Xj., X, L на выходах и входах соответствующих блоков снимаются, а на пятом управляющем выходе командного блока 22 формируется сигнал f, поступающий на третий управлякщий вход анализатора 24 выходов и на пятый
ющий на третий управлякщий вход анализатора 24 выходов и на пятый
управляющий вход переключающего блока 28. По сигналу f на третьем выходе анализатора 24 выходов формирулучше го отклика У , поступающий на третий управляюв1ий вход переключающего блока 28 и на управляюсдий вход блока 27 запоминания наилучших входов объекта оптимизации, на информационные входы которого поступают сигналы Х ,..., выходов первого блока 21 памяти о координатах вершин симплекса после отражения второй
наихудшей вершины. В блоке 27, опре- деляются по сигналу С и запоминаются координаты х вершины, которой соответствует отклик у. Одновременно с переключанщего блока 28,
С Твиях, подаваемых на выход оптимизируемой систеьы, осуществляется передача сигнала X, на информационный вход первого блока 21 памяти в виде сигнала X. При этом с управляющего выхода блока 28 на второй управляю- щий вход блока 21 поступает сигнал L, определяющий координаты блока
JUlUUH
55
координаты X записьгваются координаты Х . В момент tj- сигналы fj , D, X, L на выходах и входах соответствующих блоков снимаются, а на шесто управляющем выходе командного блока 22 формируется сигнал f, поступающий на шестой управляющий вход переключающего блока 28, на первый информационный вход которого nocTVfO
f5
20
171310773
пает сигнал у с выхода блока 27. По сигналу ff переключающим блоком
ммН
сигнал X передается в виде сигнала X на информационный вход первого блока 21 памяти. На второй управляющий вход блока 21 с управляющего выхода блока 28 поступает сигнал L, в соответствии с которым в соответствующем блоке элементов памяти вместо координат Х, записьшаются координаты Х. Таким образом, осуществляются oTfiop и запись для реализации на последуюв(ей итерации поиска в оптимизируемом объекте наилучщего из решений Х , полученных на предшествующей итерации.
В момент tj сигналы.5, X на входах и выходах соответствующих блоков снимаются, а в командном блоке 22 формируется сигнал f,, по которому сигналы X, ,. . . ,Х;, . .. ,Xf,. о координатах вершин вновь сформированного симплекса записываются в соответ- .ствующие блоки элементов памяти командного блока, откуда эти сигналы поступают на входы объекта оптимизации и его моделей.
Далее описанный цикл работы системы автоматической оптимизации повторяется.
Первьй блок 21 памяти, командный блок 22, анализатор 24 выходов, первый 25 и второй 26 блоки расчета координат отраженной вершины симплекса, блок 27 запоминания наилучших входов и командный блок 28 в процессе функционирования системы автоматической оптимизации работают следующим образом.
В первом блоке 21 памяти (фиг. 2) в первых суммирующих блоках 31-1,.., 31 -(п+1) суммируются сигналы Х,...,
yN
п-и
1
,,
18
вующих сигналов управления 1 1 вектора управляющих сигналов, определяющих номер j-го из блоков 32-1,...,32-j,...,32-(п+1) элементов памяти, в которые должен быть записан вектор сигналов X. Управляющий сигнал поступает только по одной из шин I, .,..., 1.,.,., 1 р , замыкая ключи соответствующего второго блока ключей. При этом вектор сигналов X поступает на вторые входы соответствующих первых сумматоров. Сигналы с выходов первых сумматоров поступают на входы соответствующих первых блоков 32-1 , ,... ,32-(п+1 ) элементов памя ти, где запоминаются. Таким образом, в первом блоке 2 памяти осуществляются запоминание начальных воздействий Х,...,Х и запись новых значений воздействий X в соответствующий j-й блок элементов памяти.
В командном блоке 22 (фиг. 3) мультивибратором 37 формируются командные импульсы fjj (фиг. 9) с интер25 валом времени, величина которого определяется величиной времени Тр, необходимого, для принятия решений о воздействиях на предстоящей итерации поиска, и времени Т, необходимого
JQ для завершения переходных процессов в объекте оптимизации, обусловленных изменениями их входных воздействий и оценки качества функционирования объекта оптимизации и его моделей.
35
40
Сигнал fj, через первьй ключ 36 поступает в виде сигнала f на первый уп- равляюп(ий выход командного блока, а также на вход интегратора 35, сигнал с выхода которого сравнивается в пятом блоке 34 с опо.рным сигналом на выходе первого источника 33 постоянного сигнала, величина которого за виси т от длительности запуска систепоступающие на первые входы
мы..Как только сигнал на выходе инсоответствующих сумматоров через пер- 45 становится больше опорно- вые. блоки 29-1,...,29-(п+1) ключей с ™ значения, с выхода блока 33 срав- первого информационного входа блока 21, с сигналами X, поступающими на вторые входы соответствующих сумматоров через вторые блоки 30-1,...,30- 50 (п+1) ключей с информационного входа блока 21. Ключи всех первых блоков 29-1,.... 29- (п+1) замыкаются одновременно при поступлении на их управлянения на управляющий вход первого ключа 36 поступает сигнал, в соответствии с которым ключ 36 размыкается. При этом сигнал f на первом управ- лякщем выходе командного блока исчезает.
Одновременно сигнал f через блоки 38-42 задержки поступает в виде ,5 сигналов на соответствующие управляющие выходы командного блока. Параметры блоков 38-42 подбирают такими, что эти сигналы с их выходов начинают поступать на выход командюгцие входы сигнала f,,, что имеет место только в момент запуска системы. Ключи вторых блоков 30-1,.,., 30-(п+1) замыкаются лишь при наличии на их управляющих входах соотв етст
5
0
0773
1
,,.
18
вующих сигналов управления 1 1 вектора управляющих сигналов, определяющих номер j-го из блоков 32-1,...,32-j,...,32-(п+1) элементов памяти, в которые должен быть записан вектор сигналов X. Управляющий сигнал поступает только по одной из шин I, .,..., 1.,.,., 1 р , замыкая ключи соответствующего второго блока ключей. При этом вектор сигналов X поступает на вторые входы соответствующих первых сумматоров. Сигналы с выходов первых сумматоров поступают на входы соответствующих первых блоков 32-1 , ,... ,32-(п+1 ) элементов памяти, где запоминаются. Таким образом, в первом блоке 2 памяти осуществляются запоминание начальных воздействий Х,...,Х и запись новых значений воздействий X в соответствующий j-й блок элементов памяти.
В командном блоке 22 (фиг. 3) мультивибратором 37 формируются командные импульсы fjj (фиг. 9) с интер5 валом времени, величина которого определяется величиной времени Тр, необходимого, для принятия решений о воздействиях на предстоящей итерации поиска, и времени Т, необходимого
Q для завершения переходных процессов в объекте оптимизации, обусловленных изменениями их входных воздействий и оценки качества функционирования объекта оптимизации и его моделей.
35
40
Сигнал fj, через первьй ключ 36 поступает в виде сигнала f на первый уп- равляюп(ий выход командного блока, а также на вход интегратора 35, сигнал с выхода которого сравнивается в пятом блоке 34 с опо.рным сигналом на выходе первого источника 33 постоянного сигнала, величина которого за- виси т от длительности запуска систе е Р оР становится больше опорно- ™ значения, с выхода блока 33 срав-
нения на управляющий вход первого ключа 36 поступает сигнал, в соответствии с которым ключ 36 размыкается. При этом сигнал f на первом управ- лякщем выходе командного блока исчезает.
45 становится больше опорно- ™ значения, с выхода блока 33 срав- 50
Одновременно сигнал f через блоки 38-42 задержки поступает в виде ,5 сигналов на соответствующие управляющие выходы командного блока. Параметры блоков 38-42 подбирают такими, что эти сигналы с их выходов начинают поступать на выход команд19 1
ного блока лш1ь по истечении периода запуска системы оптимизации, причем при появлепии на выходе командного блока каждого последующет о сигнала из f.(., предшествующий сигнал исчезает, К моменту t (фиг. 9), когда выполнены все операции, связанные с определением и записью в первый блок 21 памяти воздействий, подлежащих реализации на последующей итерации поиска, на выходе шестого блока 43 задержки, на вход которого поступает сигнал fg с выхода мультивибратора 37, формируется сигнал f, по которому замыкаются ключи третьих блоков 44-1,.,.,44-(п+1) ключей, через которые с информационного входа командного блока поступают сигналы Х,-. .,,Х на входы соответствующих вторых блоков 45-1,.. . ,45-(п+1) элементов памяти. При поступлении сле- дукщего импульса fp с выхода мультивибратора описанный цикл работы командного блока повторяется (за исключением формирования сигнала f , который формируется только при запуске системы).
В анализаторе 24 выходов (фиг. 4) в первом блоке 46 определения максимума и в блоке 47 определения минимума определяются соответственно мак..«акс--МИК
симальное У и минимальное Yj, значения откликов У, , . . . ,У,4.1 , полученных в результате предшествующей итер ции поиска, сигналы о которых поступают с информационного входа анализатора 24 выходов.
Сигнал о величине У
мин
с выхода
блока 47 поступает на входы седьмых блоков 50-1,...,50-j,...,50-(п+1) сравнения, в которых из него вычитаются сигналы У, , . . . ,У: , ... , о значениях соответствующих откликов. На выходах этих блоков сравнения формируются сигналы управления соответственно d , . . . ,d; , ... ,с1, причем управляющий сигнал на выходе j-ro блока сравнения появляется только при выполнении условия Yj iY JJ . Таким образом, наличие управляющего сигнала d на выходе какого-либо j-r блока сравнения свидетельствует о том, что отклик У имеет минимальное значение из всех значений откликов. Сигналы d,.. ,d,, через шестой блок 55 ключей поступают на третий выход анализатора 24 выходов в виде векто- ра D, определяющего номер наилучшей вершины симплекса, при подаче на
773 20
управляющий вход этого блока ключей управляющего сигнала ff ,.
Сигнал о величине у с выхода блока 46 определения максимума пог ступает на входы блоков 48-1,..., 48-J,...,48-(n+l) сравнения, где из
него вычитаются сигналы У , ... ,У. ,.., УП о значениях соответствующих откликов. На выходах этих блоков сравO нения формируются сигналы управления соответственно а. ,..., а ,.,.., а , причем управляющий сигнал на выходе j-ro блока сравнения формируется только при выполнении условия У.-
5 У ( 1 Таким образом, наличие сигнала а- на выходе блока 48-j сравнения свидетельствует о том, что отлик У.- имеет максимальное из всех значении откликов.
Q Сигналы а,...,а через четвер- тьй блок 53 ключей поступают на первый выход анализатора 24 выходов в виде вектора А, определяющего номер первой наихудшей вершины симплекса,
5 при подаче на управляющий гход этого блока ключей управляющего сигнала fj .
Одновременно сигналы а,, ... ,а , +, поступают на управлякщие входы вто3Q рых ключей 49-1 ,...,49-(п+1), на информационные входы которых поступают сигналы об откликах У, ,...,У,. По этим , управляющим сигналам производится размыкание того из ключей, на информационный вход которого поступает сигнал об отклике, номер которого соответствует номеру первой наихудшей вершины симплекса. В результате с выходов вторых ключей 49-1,...,49-(п+1) на соответствующие входы второго блока 52 определения максимума и на входы соответствующих восьмых блоков 51-1,...,51 - (п+1) сравнения поступают сигналы У ,...,
V.
35
40
У-,..., множестве откликов, за исключением сигнала об отклике,
имеющем значение У , ., ...макс Сигнал У о величине второго
наихудшего отклика поступает с выхода блока 52 на другие входы блоков 51-1,...,51-(п+1) сравнения, где вычитается из сигналов, поступивших с выходов вторых ключей 49-1,...,49- (п+1). На выходах этих блоков орав- . нения формируются сигналы управле55 ния соответственно с ,.. . ,с-с,
причем управляющий сигнал на выходе j-ro блока сравнения формируется толь( ч ,т «окс
ко при вьтолнении условия i. У,.
21
Таким образом, наличие сигнала с- на выходе блока .51-j сравнения СРИ- детельствует о том, что отклик У. является вторым наихудшим откликом, Сигналы с ,,,.,с„ через пятый блок 54 ключей поступают на второй выход анализатора 24 выходов в виде вектора М, определяющего номер второй наихудшей вервшны симплекса, при подаче на управляющий вход этого блок ключей управляющего сигнала f..
Таким образом, на выходах анализатора 24 выходов формируются управ лягацие сигналы А, С и D, определяю
щие номера вершин симплекса, которым J5 блоков 62-1,.,.,62-(п+1) ключей, на
управляющие входы которых поступает вектор управляющих сигналов D, из множества Х,„ ..,Х вьщеляются сигсоответствуют первый и второй наихудшие отклики и наилучший отклик, полученные на предшествующей итерации поиска.
Б первом блоке 25 расчета координат отраженной вершины симплекса (фиг. 5) сигналы Х ,... ,Х f, о координатах веришн симплекса суммируются в соответствующих сумматорах 57-1,.., 57-п. С выходов этих сумматоров сигналы через четвертые масштабирующие блоки 58-1,..,58-п, в которых осуществляется умножение на постоянньй коэффициент, равный п/2, поступают на входы соответствующих девятых блоков
59-1,...,59-п сравнения. I
Одновременно с помощью седьмых блоков 56-1,...,56-(п+1) выделяются из
налы о координатах наилучшей вершины 20 X путем замыкания ключей только того блока 62-J ключей, на управляющий вход которого поступает сигнал d, определяющий номер наилучшей вершины симплекса. Сигналы X.-, соответ-ч- ,,МИН )
25 ствующие координатам X , через блок - 62-J ключей, и четвертые сумматоры 63-1,...,63-i,...,63-п поступают на входы соответствующих элементов памяти третьего блока 64 элементов па- 30 мяти, где и запоминаются. На выходе блока 64 формируются сигналы, соот- ветствугацие координатам х .
В переключающем блоке 28 (фиг.7) формируется вектор X сигналов, соответствующих Х ,или Х(2 -пи Х , или , запись которых должна производиться в первый блок 21 памяти, и формируется соответствующий им вектор L управляющих воздействий.
В переключающем блоке 28 (фиг.7) формируется вектор X сигналов, соответствующих Х ,или Х(2 -пи Х , или , запись которых должна производиться в первый блок 21 памяти, и формируется соответствующий им вектор L управляющих воздействий.
35
множества Х ,... ,Х,. сигналы о координатах первой отражаемой вершины Х путем замыкания ключей только того j-ro блока 56-j,Ha управляющий вход которого проходит управляющий сигнал а, определяющий номер первой определяющий номер блока элементов ражаемой вершины симгшекса. Сигналы, памяти блока 21, куда должны быть за- соответствующие координатам первой писаны сигналы X.
отражаемой вершины Х, с выходов j-ro Вектор L формируется путем сум- блока ключей через третьи масштаби- мирования в суммирукщем блоке 72 рующие блоки 61-1 ,-..., 61-п, в кото- управляющих сигналов А, С и D, опрых осуществляется умножение на постоянный коэффициент (l+2/n), поступают на другие входы соответствующих девятых блоков 59-1,...,59-п сравнения, где вычитаются из сигналов, поступакщих с выходов четвертых масштабирующих блоков 58-1,..,58-п. В результате на выходах девятых блоков 59-1,...,59-п сравнения формиру50
ределяющих номера вершин симплекса (и, соответственно, номера блоков элементов памяти первого блока 21 памяти), в которых происходят изменения, и поступающих в тот момент.
когда эти изменения необходимо произвести. Кроме того, на четвертый вход первого 72-1 из шестых сумматоров поступает сигнал с выхода вто- ются сигналы о соответствующих коор- г рого источника 70 постоянного сигнала динатах Х, первой отраженной верши- через .третий ключ 71 (в момент подачи на управляющий вход этого ключа сигнала), выполняющий роль управляны симплекса, рассчитываемых в соответствии с формулой, предварительно преобразованной к виду
ющего сигнала, обеспечивающего запись
73
22 Ч..-()Х, 2
21 X,.
1
Во втором блоке 26 расчета координат отраженной вершины симплекса вполняются те же операции, что и в блоке 25, но по информации о номере второй наихудшей вершины симплекса, содержащейся в сигнале управления С, поступаю1цем на управляющий вход этого блока. В результате на его выходе формируется сигнал Х.о координатах второй отраженной вершины симплекса. В блоке 27 запоминания наилучших входов (фиг. 6) посредством восьмых
налы о координатах наилучшей вершины X путем замыкания ключей только того блока 62-J ключей, на управляющий вход которого поступает сигнал d, определяющий номер наилучшей вершины симплекса. Сигналы X.-, соответ ,,МИН )
ствующие координатам X , через блок 62-J ключей, и четвертые сумматоры 63-1,...,63-i,...,63-п поступают на входы соответствующих элементов памяти третьего блока 64 элементов па- мяти, где и запоминаются. На выходе блока 64 формируются сигналы, соот- ветствугацие координатам х .
В переключающем блоке 28 (фиг.7) формируется вектор X сигналов, соответствующих Х ,или Х(2 -пи Х , или , запись которых должна производиться в первый блок 21 памяти, и формируется соответствующий им вектор L управляющих воздействий.
определяющий номер блока элементов памяти блока 21, куда должны быть за- писаны сигналы X.
ределяющих номера вершин симплекса (и, соответственно, номера блоков элементов памяти первого блока 21 памяти), в которых происходят изменения, и поступающих в тот момент.
ющего сигнала, обеспечивающего запись
координат х в первый блок элементов памяти в первом блоке 21 памяти
Л1ИН
Сигналы Х(., -1 поступают на информационный выход переключающего блока 28 через соответственно девятый 65, десятый 66, одиннадцатью 67 и двенадцатый 68 блоки ключей и пятые сумматоры 69-1,...,69-ц в виде сигнала X в моменты срабатывания названных блоков ключей по сигналам,
соответственно f3 4
fc и f.
Формула изобретения
1
Система автоматической оптимизации, содержавшая задатчик, регулятор, исполнительньй орган,, объект управления, датчик, первый и второй блоки памяти, блок планирования эксперимента, анализатор выходов объекта оптимизации, первый блок расчета координат отраженной вершины симплекса и командньй блок, первый информационный выход которого соединен с управляющим входом регулятора, выход которого соединен с входом исполнительного органа, выход которого через объект управления соединён с выходом системы и входом датчика, группа выходов блока планирования экспе- римента соединена соответственно с труппой входов начальных воздействий первого блока памяти, группа информационных выходов которого соединена с группой информационных входов первого блока расчета координат отраженной вершины симплекса, группа информационных выходов второго блока памяти соединена соответственно с группой информационных входов анализатора выходов объекта оптимизации, первый управляющий вход которого соединен с третьим управляющим выходом командного блока, отличающаяся тем, что, с целью повьше- ния быстродействия системы, в нее введены fi моделей объекта оптимиза- ции по числу оптимизируемых параметров, первый, второй и третий масштабирующие блоки, второй блок расчета координат отраженной вершины симплекса, блок запоминания наилучших входов объекта оптимизации, переключающий блок, блок сравнения и блок расчета критерия, вход которого соединен с входом регулятора и с выходом блока сравнения, прямой вход которого соединен с выходом задатчика и входом третьего масштабирующего бло
5
0
5
0
ка, а инверсный вход блока сравнения соединен с выходом датчи|са и входом первого масштабирующего блока, подключенного выходом к первым входам п моделей объекта оптимизации, вторые и третьи входы которых соединены с выходами соответственно второго и третьего масштабирукнцих блоков, вход третьего масштабирующего блока сое0 динен с выходом регулятора, выход блока расчета критерия соединен с первым информационным входом второго блока памяти, управляющий вход которого соединен с вторым управляющим выходом командного блока, управляющий вход j-й модели объекта оптимизации соединен с (j+l)-M информационным выходом командного блока, выход j-й модели объекта оптимизации соединен с (j+l)-M информационным входом второго блока памяти, группа информационных выходов первого блока памяти соединена соответственно с группой информационных входов команд5 ного блока, первый управляющий выход которого соединен с первым управляющим входом первого блока памяти, второй управляющий вход которого соединен с управляющим выходом переключающего блока, информационный выход которого соединен с информационным входом первого блока памяти, третий, четвертый, пятый и шестой управляющие выходы командного блока соединены соответственно с седьмым, четвертым, пятым и шестым управляющими входами переключающего блока, первый, второй и третий управляющие входы которого соединены соответственно с первым, вторым и третьим управляющими выходами анализатора выходов объекта оптимизации и управляющими
0
входами соответственно первого, второго блоков расчета координат отраженной вершины симплекса и блока . запоминания наилучших входов объекта оптимизации, выходы первого, второго блоков расчета координат отраженной вершины симплекса и блока запоминания наилучших входов объекта оптимизации подключены соответственно к первому, второму и третьему информационным входам переключающего блока, четвертый информационный вход которого соединен с первым информационным входом группы информационных входов первого блока расчета координат отраженной вершины симплекса, группа информационных входов которого подклю25
чена соотве,тственно к группе информационных входов второго блока рас- чета координат отраженной вершины симплекса и к группе информационных входов блока запоминания наилучших входов объекта оптимизации, второй и третий управляюцие входы анализатора выходов объекта оптимизации подключены соответственно к четвер26
которой является управляющий вход модели регулятора, выход которой соединен с инверсным входом третьего блока сравнения, прямой вход которого является вторым входом модели объекта оптимизации, первым входом которой является прямой вход первого блока сравнения, инверсный вход которого соединен с выходом модели объ- тому и пятому выходам командного бло-10 екта управления, подключенной входом ка.к выходу модели исполнительного ор2. Устройство по п. 1, о т л и - гана, вход которой соединен с выхо- чающееся тем, что модель дом третьего блока сравнения, выход объекта оптимизации содержит первый, первого блока сравнения соединен с второй и третий блоки сравнения, мо- 15 инверсн ым входом второго блока срав- дель регулятора, модель исполнитель- нения, выход которого соединен с вхо- HoYo органа, модель объекта управле- дами модели регулятора и блока рас- ния, блок расчета критерия, выход ко- чета критерия, прямой вход второго торого является выходом модели объек- блока сравнения является третьим вхо- та оптимизации, управляющим входом 20 яом модели объекта оптимизации.
1310773
26
Фиг.З
I
I
1-
w/ I
4S
48
4
M-M 4.;.
. . «. «. «4-
Г Г 3/ П (fV L+
,-/
.M. т ей.
vL
i Г 1
I I /д//
hri
§
5Q
ь)
I
x+l
5/
v+ fry-4v :
i- -
п
l/ 1/
:.
.ff
, ,
$ j;;ff
;r
(LJ
/
TT
I 1
/
f
l
3:
фигЛ
l,jj, l
Xi
//y,f
. 01
/f
(C)
L.
)
фиг. 5
muz.В
Oflt
4
1
цзигЛ
8Сд
J(l
фиг.8
//
Редактор А.Огар
Составитель Е.Власов Техред Л.Сердюкова
Заказ 1889/43 Тираж 864Подписное
Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А.Зимокосов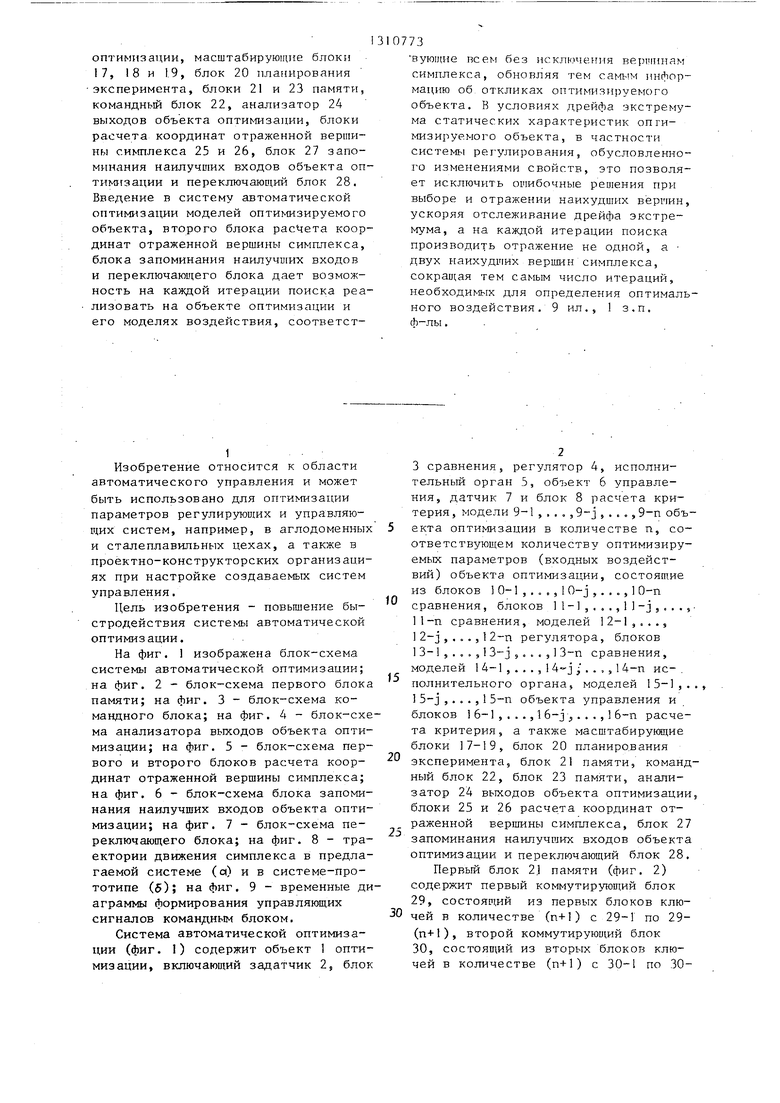


| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Система оптимизации режимов работы объекта | 1986 |
|
SU1345168A1 |
| Система автоматической оптимизации | 1983 |
|
SU1125602A1 |
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Система оптимизации режимов работы объекта | 1984 |
|
SU1190362A1 |
| Устройство для решения двухкритериальных задач нелинейного программирования | 1985 |
|
SU1252795A1 |
| Многоканальный автоматический оптимизатор | 1985 |
|
SU1269095A1 |
| Устройство для поиска координат точки экстремума функции двух переменных | 1981 |
|
SU966703A1 |
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |

Изобретение относится к области автоматического управления и может быть использовано для оптимизации параметров регулирующих и управляющих систем. Цель изобретения - повышение быстродействия системы автоматической оптимизации. Система содержит объект 1 оптимизации, состоящий из задатчика 2, блока 3 сравнения, регулятора 4, исполнительного органа 5, обьекта 6 управления, датчика 7, блока 8 расчета критерия, модели объекта оптимизации в количестве п, соответствующем количеству оптимизируемых параметров объекта (Л фие.1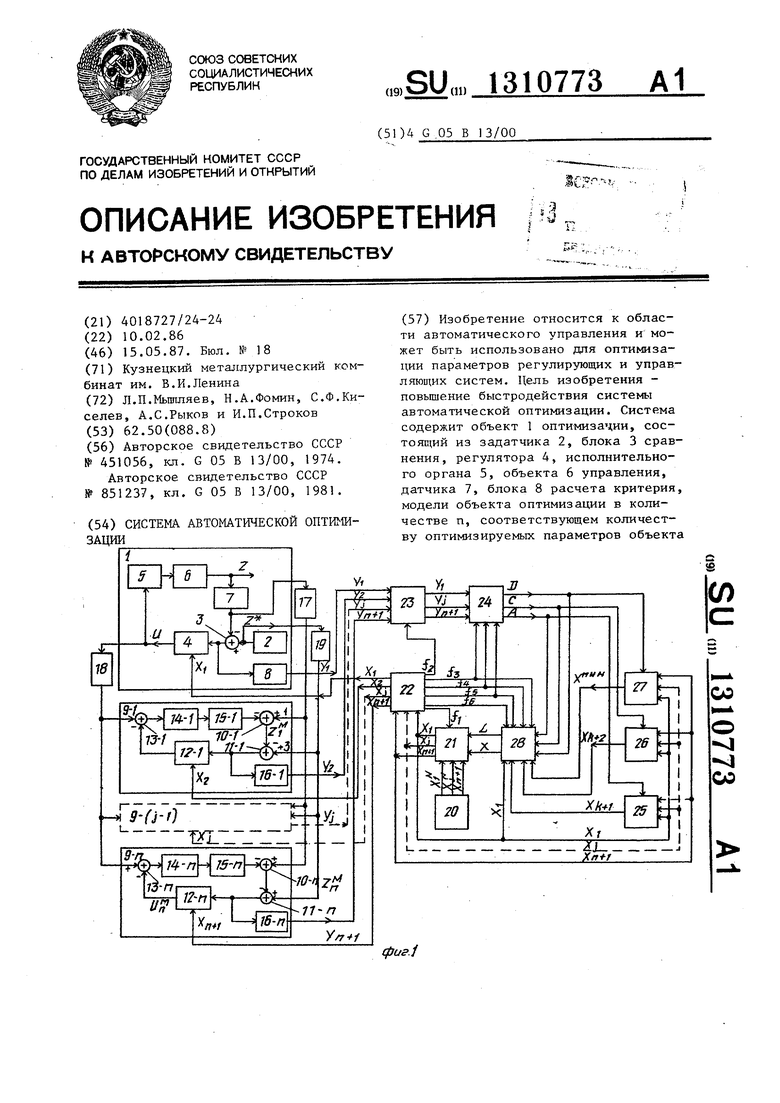
| Система автоматической оптимизации | 1972 |
|
SU451056A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Датчик для исследования жидкостей | 1979 |
|
SU851237A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
