(54) СИСТЕГ4А АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ
Изобретение относится к технической кибернетике и предназначено . для автоматического поддержания оптимальных режимов работы многомерных стохастических объектов управления с изменяющимися характеристиками.
Известна система экстремального управления, содержащая корректор, первые выходы которого соединены с входами объекта, и блок определения характеристик объекта, осущесьвляющий построение математической модели объекта управления l.
Недостатком данной системы является невысокое быстродействие, объясняющееся тем, что определение оптимальных режимов осуществляется в два этапа: идентификация и собственно оптимизация.
Наиболее близким техническим решением является система автоматической оптимизации, содержащая анализатор выхода объекта, первый блок памяти и последовательно соединенные блок планирования эксперимента, командный блок, регулятор, объект управления и второй блок памяти 2.
Недостатком известной системы является невысокое быстродействие системы, вытекающее из того, что про2
цесс поиска оптимальных режимов складывается из трех этапов: накопления информации, построения математической модели объекта управления и собственно оптимизации. Схемная реализация данного подхода к задаче оптимизации приводит к структурной избыточности реализующего его устройства и необходимости использования
10 блоков памяти- большой емкости, что также ведет к снижению быстродействия.
Цель изобретения - повышение быстродействия системы автоматической
15 оптимизации.
Поставленная цель достигается тем, что в устройство введены последовательно соединенные анализатор входа объекта и сумматор, выход которого
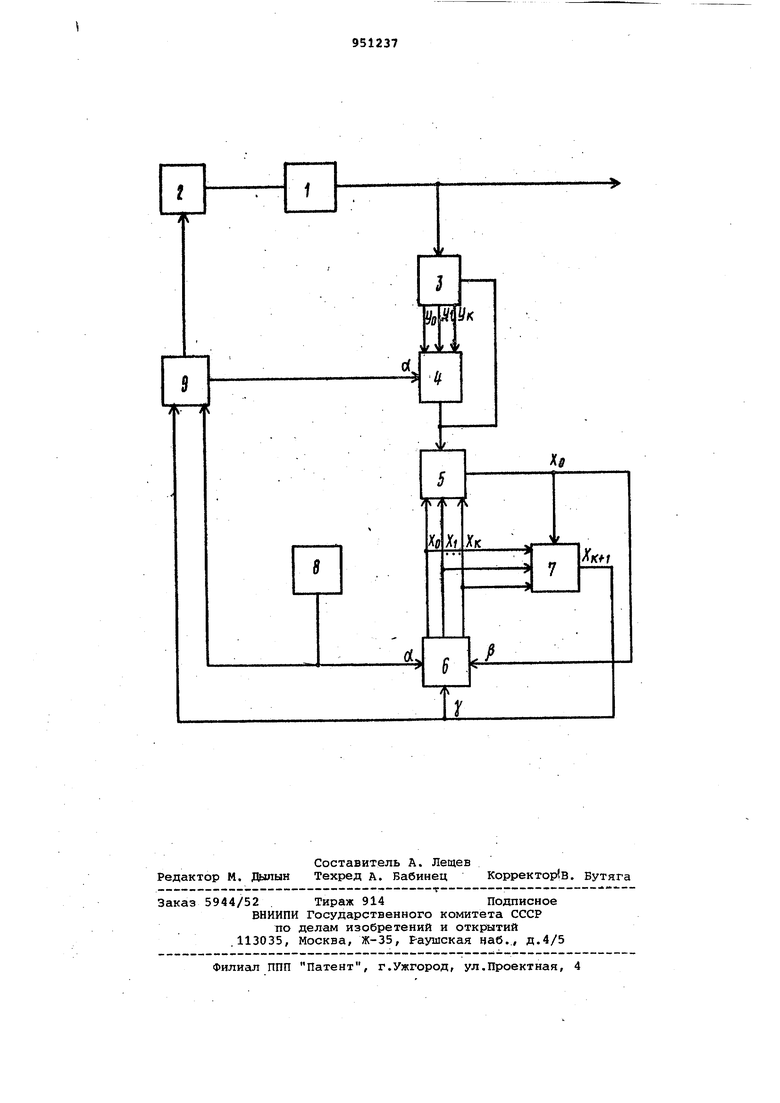
20 соединен с первым входом первого блока памяти и со вторым входом командного блока, вторые входы - с соответствующими выходами первого блока памяти и соответствующими первы25ми входами анализатора входа объекта, второй вход которого соединен со вторым входом второго блока памяти и с выходом анализатора выхода объекта, а выход - со вторым входом пер30вого блока памяти, третий вход которого соединен с выходом блока плга нирования эксперимента, выходы второго блока памяти соединены ссоответствугошими первыми входами анализ тора выхода объекта, второй вход ко торого соединен со вторым выходом командного блока. Таким образом, предлагаемая сист ма реализует последовательный симплекс-метод отыскания экстремума ст тической нарактеристики объекта упразления5/ -у .-i-l. v,4 к ;-/-1 .где Хр- наихудшая (отражаемая вершина симплекса; 4t , отраженная вершина симплекс Х- .г-Гк множество вершин симплекса за исключением наихудшей; к- размерность пространства факторов. Благодаря использованию последов те.пьного симплекс-метода, являющегося алгоритмом адаптационной оптимизации промышленных технологических объектов, предлагаемая система не производит построения математиче кой модели, осуществляя оптимизацию непосредственно на объекте, что поз воляет сократить время поиска оптимальных режимов. Кроме того, систем реализующая последовательный симплекс-метод, не производит пробных шагов для определения направления движения (каждый шаг является рабочим) , позволяет оптимизировать стохастические объекты (последовательный симплекс-метод в силу своей непараметричности является помехоусто чивой процедурой), отслеживать дрей параметров, требует небольшой емкое ти блока памяти .(k+1 ячеек). На чертеже представлена блок-схе ма системы.. Блок-схема системысодержит объе управления 1, регулятор 2, второй блок памяти 3, анализатор выхода объекта 4, анализатора входа объекта 5, первый блок памяти 6, суммато 7, блок планирования эксперимента 8 командный блок 9. Система работает следующим образом. В исходном состоянии в ячейках второго блока памяти 3 и первого блока памяти б записаны нули, на пе вом и втором входах командного блока 9 также нули. В момент пуска бло планирования эксперимента 8 начинае формировать входные воздействия х согласно матрице насыщенного плана эксперимента (симплекс-план), которые по третьему входу записываются в первый блок памяти 6, а также подаются на первый вход командного блока 9, являющегося по сути коммутатором, включающим первый или втор входы на выход. Через регулятор 2, преобразующий сигналы системы в физические воздействия, х подаются на объект управления 1. Соответствующие отклики объекта yi по первому входу записываются в ячейки второго блока памяти 3. После формирования (k+1)-го воздействия блок планирования эксперимента 8 отключается, при этом командный блок 9 отключается по первому входу и открывается по второму входу, во всех ячейках блоков памяти 3 и б записаны соответствующие значения факторов и откликов. Это состояние является исходным для осуществления собственно процесса оптимизации, который начинается в момент подачи команды со второго выхода командного блока 9 на второй вход анализатора выхода объекта 4. По этой команде включается анализатор .выхода объекта 4, который, осуществляя сравнение записанных в ячейках второго блока памяти 3 значений откликов у-., выделяет наихудший из откликов у, Выделенное значение у подается на второй вход второго блока памяти 3, где стирается в соответствующей ячейке, а также на второй вход анализатора входа объекта 5. По этому сигналу анализатор входа объекта 5 выделяет вектор факторов Xj,, соответствующий данному отклику Уд, и подает его на второй вход первого блока памяти входа 6, где соответствующая ячейка зануляется. Выделенный х подается ча первый вход сумматора 7, на входы которого подаются также все значения Х . Сумматор 7 вычисляет .rV-U., , поскольку в ячейке, соответствующей Хо, записаны нули. Вычисленное значение Ч (. с выхода сумматора 7 подается на первый вход первого блока памяти б, где записывается в свободную ячейку. Этот сигнал подается через второй вход командного блока 9 на регулятор 2, который подает соответствующее воздействие на вход объекта управления 1. Соответствующая реакция у, записывается в свободную Ячейку второго блока памяти 3. На этом первая итерация заканчивается. Вторая итерация осуществляется аналогично первой и начинается с подачи командного импульса со второго выхода командного блока 9 на второй вход анализатора выхода объекта 4,По этой же команде анализатор выхода объекта 4 выделяет очередное наихудшее значение отклика, которое затем затирается во втором бло.ке памяти Зи подается на анализатор
входа объекта 5, который выделяет соответствующий этому отклику вектор факторов Хо . Это значение стирается в соответствующей ячейке первого блока памяти б и вместе с остальными значениями факторов if подается на сумматор 7. Сумматор 7 вновь вычисляет улучшенный набор факторов, который записывается в свободную ячейку первого блока памяти 6 и через командный блок 9 и регулятор 2 подается на объект управления 1. Последующие итерации осуществляются аналогично предыдущим .
Таким образом, в лроцессе работы системы осуществляется отражение симплекса и происходит последовательное улучшение откликов объекта. В окрестности экстремума происходит закли.нивание симплекса в области оптимального- режима, если же экстремум объекта дрейфует, то система отслеживает этот дрейф.
Предлагаемая система может быть выполнена на унифицированных элементах и обладает конструктивной простотой, что объясняется тем, что в процессе оптимизации в ней осуществляются простейшие операции типа сложения, сравнения, записи числа в ячейку и его стирания. По сравнению с известными предлагаемая система обладает повышенным быстродействием, конструктивной простотой, помехоустойчивостью, что позволяет решать задачи экстремальной оптимизации нестационарных объектов, подверженных воз.действию помех. Система позволяет сократить время проведения процесса, уменьшить расход реагентов, повысить выход готовой продукции, что дает возможность снизить ее себестоимость и повысить рентабельность производства в целом. По сравнению с базовым объектом предлагаемая система оптимизации применительно к производству кальцинированной соды аммиачным методом позволяет уменьшить расходы .очищенного рассола на 0,002 м/т со-, ды; извести на 0,2 кг/т соды; пара аа 0,0003 Гкгш/т соды и ряда других реагентов, что приводит к снижению себестоимости готовой продукции на 0,005 р/т соды.
Формула изобретения
Система автоматической оптимизации, содержащая анализатор выхода объекта, первый блок памяти и последовательно соединенные блок планирования эксперимента, командный блок, регулятор, объект управления и второй блок памяти, отличающаяся тем, что, с целью повышения быстродействия системы, в нее введены последовательно соединенные анализатор входа объекта и сумматор, выход которого соединен с первым входом первого блока памяти и с входом командного блока, вторые входы - с соответствукяцими выходами первого блока памяти и соотвествующими первыми входами ангшиэатора входа объекта, второй вход которого соединен с вторым входом второго блока памяти и с выходом анализатора выхода объекта, а выход с вторым входом первого блока памяти, третий вход которого соединен с выходом блока планирования эксперимета, выходы второго блока памяти соеднены с соответствующими первыми входами анализатора выхода объекта, второй вход которого соединен с вторым выходом командного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 651314, кл. G 05 В 13/02, 1979.
2.Авторское свидетельство СССР № 451056, кл. G 05 В 13/00, 1974
- (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической оптимизации | 1983 |
|
SU1125602A1 |
| Система оптимизации режимов работы объекта | 1986 |
|
SU1345168A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Система оптимизации режимов работы объекта | 1984 |
|
SU1190362A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| Система автоматической оптимизации | 1972 |
|
SU451056A1 |
| Система автоматической оптимизации | 1989 |
|
SU1735805A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |