Изобретение относится к технической кибернетике и предназначено для автоматического отыскания оптимальных режимов работы многомерных стохастических объектов управления.
Известна система автоматической оптимизации, содержащая объект управления, командный блок, датчики входных и выходных переменных объекта управления, соединенные блоком памяти, выходы которого подключены к блоку идентификации, связанному через блок оптимизации ; регулятором входных переменных, а .также соединенный с датчиком входных переменных анализатор входа объекта, подключенные к нему последовательно соединенные блок планирования эксперимента и блок уменьшения шага планирования, подключенный к регулятор входных переменш 1х, и соединенньМ с выходом блока идентификации блок контроля идентификации, подключенны к входам блока оптимизации, блок планирования эксперимента и командного блока, выход которого связан с входом блока планирования эксперимента, а .второй вход - с анализатором яыхода объекта {j .
Недостатком данной систеьял является недостаточно высокая точность, объясняющаяся тем, что оптимизация производится не путем непосредственного экспериментирования, а путем последовательного решения трех задач: накопления информации, построения математической модели объекта . управления и собственно, оптимизации, в результате чего происходит накопление ошибок, возникающих на различных этапах.
Наибо.пее близкой к изобретению является система автоматической оптимизации, содержащая анализатор выхода объекта, первый блок памяти и пбследовательно соединенные блок планирования эксперимента, командный блок, регулятор, объект управления и второй блок памяти, а также последовательно соединенные анализатор входа объекта и сумматор, выход которого соединен с первым входом первого блока памяти и с вторым входом командного блока, вторы входы - с соответствующими выходами первого блока памяти и соответствующими первыми входами анализатора входа объекта, второй вход кото256022
рого соединен с вторым входом второго блока памяти и с выходом анализатора выхода объекта, а выход с вторым входом первого блока памя5 ти, третий вход которого соединен с выходом блока планирования эксперимента, выходы второго блока памяти соединены с соответствующими первыми входами анализатора выхода объ10 екта, второй вход которого соединен с ВТОР1Л4 выходом командного блока 2 .
Недостатком известной cиcтe flы является недостаточно высокая точ15 ность отыскивания экстремума, объясняющаяся тем, что система, реализуя стандартный последовательньй симплекс-метод, отыскивает не саму точку экстремума, а некоторую
0 ее окрестность, в которой затем начинается блуждание симплекса.
Целью изобретения является повышение точности оптимизации.
J Поставленная цель достигается тем, что в систему, содержащую последовательно соединенные регулятор и объект управления, подключенный выходом к первому входу первого блока памяти, подключённого выходом к первым входам анализатора выхода объекта, выход которого подключен к второму входу первого блока памяти и к первому ВХОДУ анализатора входа объекта, выход которого подключен
5 к первому входу второго блока памяти, выходы последнего подключены к вторым входам анализатора входа объекта, второй вход второго блока памяти соединен с выходом сумматора
и первым входом командного блока, а третий вход - с выходом блока планирования эксперимента и вторым входом командного блока, первый выход которого подк.гаочен к входу
5 регулятора, а второй выход - к второму входу анализатора выхода объекта, введены счетчик итераций, блок управления шагом поиска, первый блок умножения и второй блок умно0 жения, при этом вход счетчика итераций подключен к второму выходу командного блока, а его выход - к входу блока управления шагом поиска, первый выход которого подключен к
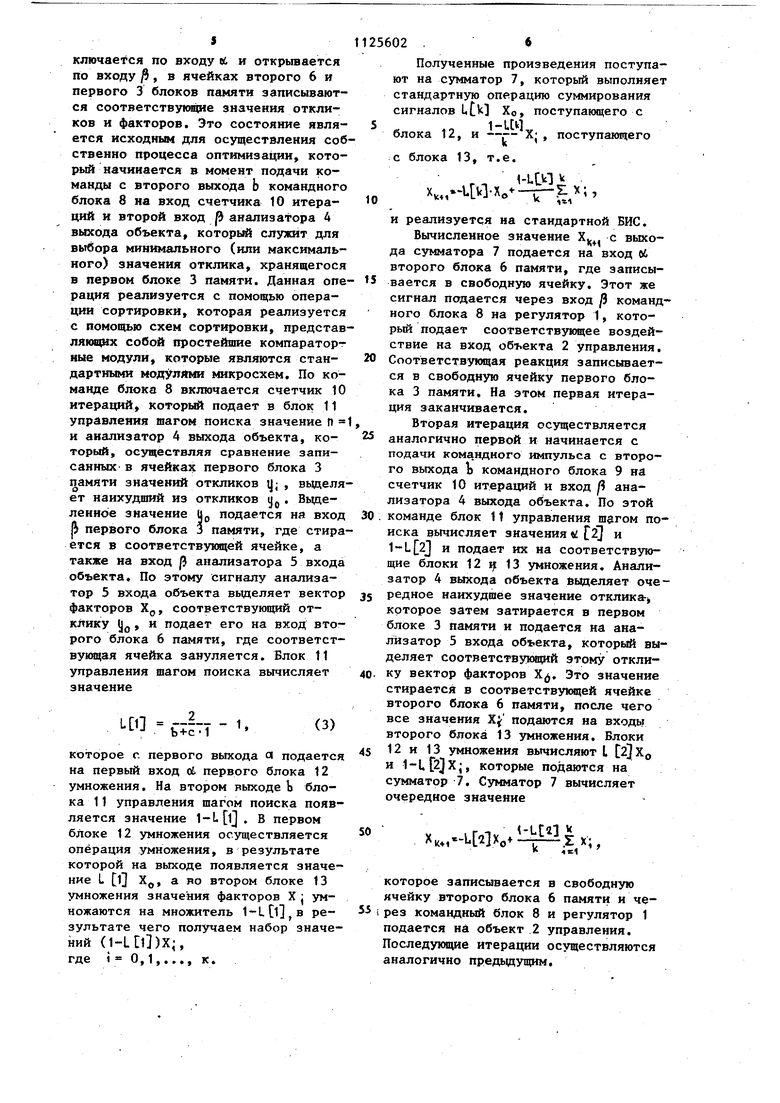
5 первому входу первого блока умножения, соединенного вторым входом с выходом анализатора входа объекта, а выходом - с первым входом сумма. тора, вторые входы которого подключены к Выходам второго блока умножения, первый вход которого подключен к второму выходу блока управления шагом поиска, а вторые входы к выходам второго блока памяти, Такю4 образом, предлагаемая система реализует модифицированнь) последовательный симплекс-метод отыскивания экстремума статистической характеристики объекта управления, 5 где XQ- наихудшая (отражаемая вершина симплекса; Х|. - отраженная вершина симплекса; X:,,k- множество вершин симплекса за исключением наихудшей; k - размерность факторного пространтсва; L - программно изменяемый (в зависимости от номера итерации) параметр, опре елякщий характер деформации лекса в процессе по- иска, Если параметр в процессе поиска изменяется по правилу , b+c-n } где h - номер итерации; Ь и с - произвольные положительные константы, то процесс оптимизации происходит по типу стохастической аппроксимации, т,е, обеспечивается сходимость с вероятностью (1) в условиях помех. Благодаря использованию модифицированного последовательного симплекс метода, являющегося алгоритмом адаптационной оптимизации пpo в шeнныx технологических объектов, предлагаемая система не производит оптикшзацию непосредственно на объекте, что исключает возникновение погрешностей связанных с процессом иденти шкацйи, Кроме того, предлагаемая система, осуществляя поиск по типу стохастической аппроксимации, позволяет с более высокой точностью локализовать экстремум в обстановке помех. 024 На чертеже представлена блок-схема предлагаемой системы автоматической оптимизации. Предлагаемая система содержит регулятор 1, объект 2 управления, пер- , вый блок 3 памяти, анализатор 4 выхода , анализатор 5 входа объекта, второй блок 6 памяти, сумматор 7, командный блок 8, блок 9 планирования эксперимента, счетчик 10 итераций, блок 11 управления шагом поиска, первый блок 12 умножения и второй блок 13 умножения. Система автоматической оптимизации работает следующим образом, В исходном состоянии в ячейках первого и второго блоков 3 и 6 памяти записываются нули, на первом Л и втором и входах командного блока 8 также нули, в блок 11 управления шагом поиска вводятся значения констант Ь и с. Для пуска устройства, т,е, для формирования исходного симплекса, служит блок 9 планирования экс- перимента, который представляет собой генератор двоичных импульсов, описывающих по заданной программе исходный симплекс. Например, при .числе факторов равном 3, необходимо сгенерировать последовательность импульсов вида -1,-1, + 1,-И ,-1,-1, ,-t, + t,-t,. Данная последовательность набивается на перфоленте и считывается до запуска устройства с помощью фотодиодного считывающего устройства ФСУ-1 или любого перфоленточного устройства. Таким образом, в момент пуска блок 9 планирования эксперимента начинает формировать входные воздействия Xj согласно матрице нас1яценного -плана эксперимента (симплекс-план), которые по третьему входу Jf записываются во второй блок 6 памяти, а также подаются на вход oi командного блока 8, являющегося оо сути коммутатором, включающим входы об и А на первый выход а, Через регулятор 1 входных переменмых сигнал Х, преобразованный в физические воздействия, подается на объект 2 управления, Соответствунщие отклики объекта ц по первому входу ot записываются в ячейки первого блока 3 памяти. После формирования (к+1)-го воздействия блок 9 планирования эксперимента отключается, при этом командный блок 8 отключаеТся по входу Ш. и открьшается по входу , в ячейках второго 6 и первого 3 блоков памяти записываются соответствующие значения откликов и факторов. Это состояние является исходным для осуществления соб ственно процесса оптимизации, который начинается в момент подачи команды с второго выхода b командного блока 8 на вход счетчика 10 итераций и второй вход анализатора 4 выхода объекта, который служит для выбора минимального (или максимального) значения отклика, хранящегося в первом блоке 3 памяти. Данная one рация реализуется с помощью операции сортировки, которая реализуется с помощью схем сортировки, представ ляющих собой простейшие компаратор-г ные модули, которые являются стандартными модулями микросхем. По команде блока 8 включается счетчик 10 итераций, который подает в блок 11 управления шагом поиска значение п и анализатор 4 выхода объекта, который, осуществляя сравнение записанных в ячейках первого блока 3 памяти значений откликов Ц; , выделя ет наихудший из откликов i|g . Вьвделенное значение UQ подается на вход ji первого блока 3 памяти, где стира ется в соответствукщей ячейке, а также на вход |3 анализатора 5 входа объекта. По этому сигналу анализатор 5 входа объекта выделяет вектор факторов XQ, соответствующий отклику Уо и подает его на вход второго блока 6 памяти, где соответствующая ячейка эануляется. Блок 11 управления шагом поиска вычисляет значение которое с первого выхода я подается на первый вход ot первого блока 12 умножения. На втором выходе Ь блока 11 управления шагом поиска появляется значение , В первом блоке 12 умножения осуществляется операция умножения, в результате которой на выходе появляется значение L l Хо а во втором блоке 13 умножения значения факторов X j умножаются на множитель 1-Ltl,B результате чего получаем набор значений ()X, где i 0,1,..., к. 02 ,6 Полученные произведения поступают на сумматор 7, который выполняет стандартную операцию суммирования сигналов Ц Хо, поступающего с 1-LC4, блока 12, и -г- поступающего с блока 13, т.е. Vii«b;, Х „-L vl-Xoк реализуется на стандартной БИС, Вычисленное значение Х, с выхода сумматора 7 подается на вход oi второго блока 6 памяти, где записывается в свободную ячейку. Этот же сигнал подается через вход ji командного блока 8 на регулятор 1, который подает соответствующее воздействие на вход объекта 2 управления. Соответствующая реакция записывается в свободную ячейку первого блока 3 памяти. На этом первая итерация заканчивается. Вторая итерация осуществляется аналогично первой и начинается с подачи командного импульса с второго выхода Ь командного блока 9 на счетчик 10 итераций и вход / анализатора 4 выхода объекта. По этой команде блок 11 управления шагом поиска вычисляет значения «i Г2 и и подает их на соответствующие блоки 12 1)1 13 умножения. Анализатор 4 выхода объекта выделяет очередное наихудшее значение откликаг которое затем затирается в первом блоке 3 памяти и подается на анализатор 5 входа объекта, который выделяет соответствукщий этому отклику вектор факторов Х. Это значение стирается в соответствующей ячейке второго блока 6 памяти, после чего все значения Xj; подаются на входы второго блока 13 умножения. Блоки 12 и 13 умножения вычисляют L (, и , которые подаются на сумматор 7. Сумматор 7 вычисляет очередное значение -Lt«3 « -ьМх, которое записывается в свободную ячейку второго блока 6 памяти и через командный блок 8 и регулятор 1 подается на объект 2 управления. Последующие итерации осуществляются аналогично предьодущим. . . Правило останова реализуется с помощью счетчика 10 итераций и блока 11 управления шагом поиска, где после итерации с достаточно большим номером могут быть изменены значени констант b ис , т.е. процесс продол жается с новьтми параметрами. Таким образом в процессе работы системы осуществляется отражение симплекса и происходит последовател нее улучшение откликов об-ьейта. По мере движения к экстремуму происходит уменьшение размеров симплек са по правилам стохастической аппроксимации, что позволяет точно локализовать экстремум в условиях помех. Предлагаемая система может быть выполнена на унифицированных элементах и обладает конструктивной простотой, что объясняется тем, что в процессе поиска в нем осуществляю ся простейшие операции типа сложения, умножения, сравнения, записи 2 8 числа в ячейку и его стирание. По сравнению с известными системами предлагаемая обладает конструктивной простотой, повьш1енной точностью и помехоустойчивостью. Обеспечивая более точное отыскивание оптимальных режимов технологических процессов система позволяет сократить расход реагентов и повысить выход готовой продукции, что ведет к повьпнению эффективности производства в целом. По сравнению с известной предлагаемая система автоматической Оптимизации применительно к производству кал| цинированной соды аммиачным методом позволит уменьшить расходы на 1 т соды: очищенного рассола на 0,002 м, извести на 0,02 кг, пара на 0,003 Гкал, электроэнергии на 0,04 кВт.ч и других реагентов, что приводит к снижению себестоимости продукции на 0,005 руб./т соды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Система оптимизации режимов работы объекта | 1984 |
|
SU1190362A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система оптимизации режимов работы объекта | 1986 |
|
SU1345168A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Система автоматической оптимизации | 1972 |
|
SU451056A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| Устройство для поиска координат точки экстремума функции двух переменных | 1981 |
|
SU966703A1 |
| Адаптивный идентификатор | 1984 |
|
SU1136115A1 |
СИСТЕМА АВТОМАТИЧЕСКОЙ ОПТИШЗАЦИИ, содержащая последовательно соединенные регулятор и объект управления, подключенный выходом к первому входу первого блока памяти, подключенного выходами к первым входам анализатора выхода объекта, вьтход которого подключен к второму входу первого блока памяти и к первому входу анализатора входа объекта, выход которого подключен к первому входу второго блока памяти выходы последнего подключены КВТОрЕ1М входам анализатора входа объекта, второй вход второго блока памяти соединен с выходом сумматора и пepвы входом командного блока, а третий ;вход - с выходом блока планирования эксперимента и вторым входом командного блока, первый выход которого подключен к входу регулятора, .а второй выход - к второму входу анализатора выхода объекта, отличающаяся тем, что, с целью повышения точности оптимизации, в нее введены счетчик итераций, блок управления шагом поиска, первый блок умножения и второй блок умножения, при этом вход счетчика итераций подключен к второму выходу командного блока, а его выход - к входу блока управления шагом поиска, первый выход которого подключен к первому входу первого блока умножения, соединенного вторым входом с анализатора входа объекта, а выходом - с первым входом сумматора, вторые входы которого подключены к выходам второго блока умножения, первый вход которого подключен к второму выходу блока управления щагом поиска, а Ювторые входы - к выходам второго U1 блока памяти. 9 D О
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматической оптимизации | 1972 |
|
SU451056A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
