1
Изобретение относится к технической кибернетике и предназначено для поддержания оптимальных режимов работы многомерных стохастических объектов управления, обладающих следующими свойствами.
Статическая характеристика объекта управления может быть представ- лена в виде
10
Y(X)Q(X)+Z,
где Y и Q - наблюдаемое и истинное значения функции отклика ,
Q(X) - неизвестная функция-, Z - приведенная случайная помеха, соизмеримая по величине с диапазоном изменения.
Величина помехи Z изменяется существенно (соизмеримо с диапазоном изменения Q) за время, меньшее времени переходных процессов, по каналу управляющие воздействия - значения функции отклика.
Целью изобретения является повышение точности и быстродействия системы о птимизации режимов работы объекта.
На чертеже приведена блок-схема системы оптимизации режимов работы объекта.
Система- оптимизации режимов работы объекта содержит объект 1 управления, вход которого связан с выходом регулятора 2, второй блок 3 памяти, анализатор 4 выхода объекта, первый выход которого связан с первым входом анализатора 5 входа объекта, выход которого связан с вторым входом первого блока 6 памяти и первьпу входом сумматора 7, блок 8 планирования экс- .перимента, выход которого связан с первым входом первого блока 6 памяти и вторым входом командного блока 9, первый вход которого связан с выходом сумматора 7, первый выход с входом регулятора 2, а второй выход с первым входом анализатора выхода объекта 4, первый выход которого также связан с первьм входом второго блока 3 памяти, а второй выход с вторым входом третьего блока 10 памяти,идентификатор 11, первый вход которого связан с выходом второго блока 3 памяти, второй вход с выходом первого блока 6 памяти, а выход с первым вхо15
20
1345168
дом модели 12, второй вход которой связан с выходом первог о блока 6 памяти, а выход с первым входом третьего блока 10 памяти, датчик 13 выходного параметра объекта, вход которого связан с выходом объекта управления, а выход со вторым входом второго блока 3 памяти. Устройство и работа описаны для k факторов оптимизации.
Задачей оптимизации является поиск (1) значений факторов, соответствующих
экстремуму целевой функции (истинного значения). Работу системы рассмотрим на примере задачи поиска минимума целевой функции.
В исходном состоянии в ячейках второго блока 3 памяти, первого блока 6 памяти и третьего блока 10 памяти записаны нули, на первом и втором входах командного блока 9 также - нули.
С момента пуска блок 8 планирования эксперимента с периодичностью 2 25 начинает формировать входные воздействия X; согласно матрице насыщенного плана (симплекс плана), которые по первому входу последовательно записываются в ячейки первого блока 6 памяти, а также подаются на второй вход командного блока 9, с .первого выхода которого поступают на регулятор 2, преобразующий сигналы системы в физические воздействия, и реализуются на объекте 1 управления.
Сигналы об измеренных значениях соответствующих откликов Y; с выхода объекта 1 управления через датчик 13.поступают на второй вход второго блока 3 памяти, где записываются в ячейки памяти.
Таким образом, после реализации k+1 опыта исходный план эксперимента реализован. После реализации плана эксперимента во всех ячейках первого блока 6 и второго блока 3 памяти записаны соответствующие значения факторов и значения (измеренные) откликов, полученные в k+1 опытах. По этим значениям идентификатор 11 определяет
30
35
40
45
50
коэффициенты а (,k) модели, заданной, например, в виде
А
Q
.Ца
J
(2)
55
Сигнал о значении коэффициентов а; поступает на первый вход модели 12. На ее второй вход с выхода первого блока 6 памяти поступают сигналы о
Таким образом, после реализации k+1 опыта исходный план эксперимента реализован. После реализации плана эксперимента во всех ячейках первого блока 6 и второго блока 3 памяти записаны соответствующие значения факторов и значения (измеренные) откликов, полученные в k+1 опытах. По этим значениям идентификатор 11 определяе
0
коэффициенты а (,k) модели, заданной, например, в виде
.Ца
J
(2)
55
Сигнал о значении коэффициентов а; поступает на первый вход модели 12. На ее второй вход с выхода первого блока 6 памяти поступают сигналы о
значениях факторов X . В модели 12 с использованием полученных в идентификаторе 11 коэффициентов а: рассчиты- ,ваются оценки истинного значения функции отклика Q;, соответствующие значениям факторов X;,
После этого командный блок 9 отключается по второму входу и открывается по первому, а на втором его выходе появляется командный сигнал.Это состояние является исходным для осуществления собственно процесса оптимизации.
Первый шаг поиска оптимального режима работы объекта 1 управления начинается в момент подачи командного сигнала с второго выхода командного блока 9 на первый вход анализатора 4 выхода объекта, который по этому сигналу вьщеляет наихудшую оценку истинного значения функции отклика Qg из всех оценок Q, Сигнал о наихудшей оценке Q с первого выхода анализатора 4 выхода объекта подается на первый вход анализатора 5 входа объекта. В нем происходит вьщеле- ние значений факторов Х. соответствующих наихудшей оценке Q, из всех значений факторов X;(,k). Кроме того, сигнал о наихудшей оценке истинного значения функции отклика Q подается на первый вход второго блока 3 памяти.
При этом в соответствующей ячейке стирается информация о значении функции отклика Y, соответствующего значениям факторов Х. С второго выхода анализатора выхода объекта также подается сигнал на второй вход третьего блока 10 памяти. При этом стирается записанная в нем информация. Сигнал о выделенной в анализаторе 5 входа объекта реализации факторов Хд, соответствующей наихудшей оценке истинного значения функции отклика QJ.,, подается на первый вход сумматора 7, на второй вход которого с выхода первого блока 6 памяти подаются сигналы о значении всех факторов X;. Сумматор 7 вычисляет новые значения факторов по формуле
2 Л.
., -(-1
Сигнал о реализации факторов Х,, соответствующий наихудшей оценке отклика QO, также подается на второй
. 5
10
15
20
25
30
35
40
45
50
55
вход первого блока 6 памяти, где информация об этой реализации стирается в соответствующей ячейке.
Сигнал о вычисленных значениях Х|, с выхода сумматора подается на первый вход командного блока 9, с его выхода - на вход регулятора и реализуется в объекте. Сигнал об измеренном значении отклика Y, с выхода датчика 13 подается на первый вход второго блока 3 памяти и записывается в свободной ячейке.
По новым значениям факторов и откликов, записанных в первом 6 и втором 3 блоках памяти, идентификатор 11 уточняет коэффициенты а: (,k) модели.
По уточненной модели рассчитываются и записываются в ячейках третьего блока 10 памяти оценки истиннь1Х значений функции отклика Q (,k+1), соответствующие записанному в первом блоке 6 памяти новому набору значений факторов.
На этом первый шаг поиска оптимального режима заканчивается. Последующие, шаги осуществляются аналогично первому, начиная с подачи командного сигнала со второго выхода командного блока 9 на второй вход анализатора выхода объекта 4.
Таким образом, в процессе работы системы осуществляется отражение симплекса и происходит последовательное улучшение отклика. Поскольку оценки функции отклика, полученные на МНК, являются наивероятнейшими (истинными) и из них исключены эффекты влияния возмущения Z (фиг. 1), то по сравнению с прототипом уменьшается ошибка при выборе направления движения симплекса. Следовательно, уменьшается отклонение направления движения симплекса от направления градиента функции отклика и повышается скорость поиска. По той же причине повьш1ается точность нахождения экстремума целевой функции.
В окрестностях экстремума симплекс совершает колебательные движения в оптимальной области. Если область дрейфует, система отслеживает этот дрейф.
Формулаизобретения
Система оптимизации режимов работы объекта, содержащая блок планирования
513
;жсперимента, анализатор выхода объекта, первый выход которого соединен с первым входом анализатора входа объекта, выходом подключенного к первому входу сумматора, выход которого соединен с первым входом командного блока, подключенного первым выходом через регулятор к входу объекта управления, выход блока планирования эксперимента связан с вторым входом командного блока и первым входом первого блока памяти, выход анализатора входа объекта связан с вторым входном первого блока памяти, выход которого связан с вторым входом анализатора входа объекта и вторым входом сумматора, вьжодом подключенного к третьему входу первого блока памяти, второй выход командного блока связан с первым входом анализатора выхода объекта, первым выходом связанного с
86
первым входом второго блока памяти, отличающаяся тем, что, с целью повьшения точности и быстродействия системы, она содержит датчик 1зыходног о параметра объекта, идентификатор, модель и третий блок памяти, первый вход идентификатора связан с выходом BTopoi o блока памяти, второй
вход - с выходом первого блока памяти и первым входом модели, первый вход третьего блока памяти соединен с выходом модели, а выход - с вторым входом анализатора выхода объекта,
второй выход которого соединен с вторым входом третьег о блока памяти, а выход объекта управления связан с входом датчика, выход которого связан с вторым входом второго блока
памяти , выход идентификатора соединен с ВТОРЬМ входом МО - дели.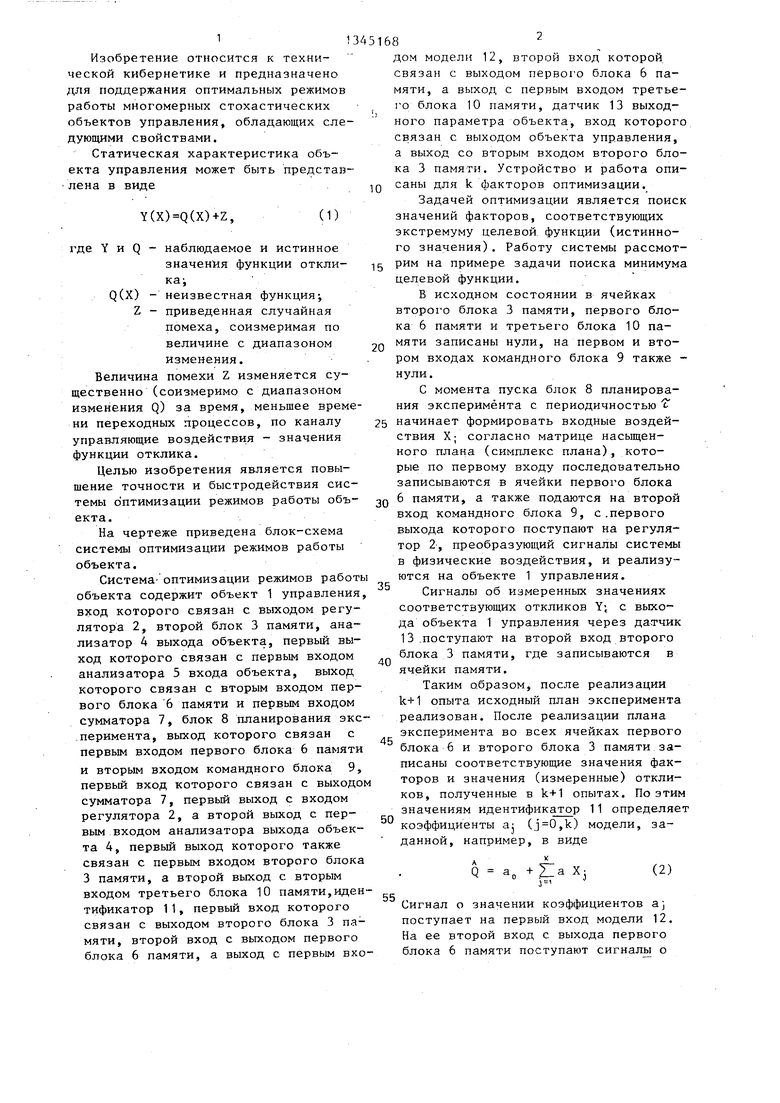
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимизации режимов работы объекта | 1985 |
|
SU1260916A1 |
| Система оптимизации режимов работы объекта | 1984 |
|
SU1190362A1 |
| Система оптимизации режимов работы объекта | 1985 |
|
SU1287103A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Система автоматической оптимизации | 1983 |
|
SU1125602A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| Устройство для проведения многофакторного эксперимента | 1989 |
|
SU1691820A1 |
| УСТРОЙСТВО ДЛЯ ЦИКЛОВОЙ СИНХРОНИЗАЦИИ | 2007 |
|
RU2348117C1 |
| УСТРОЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ПО ЦИКЛАМ | 2003 |
|
RU2231228C1 |
Изобретение относится к технической кибернетике и позволяет повысить быстродействие и точность поиска и поддержания оптимальных режимов работы многомерных стохастических объектов управления-, подверженных действию неконтролируемых возмущений.В момент пуска блок планирования эксперимента 8 генерирует входные воздействия согласно матрице насыщенного симплексплана, который реализуется на объекте управления. Сумматор 7 формирует новое значение входного воздействия,координаты новой вершины симплекса путем отражения вершины, соответствующей наихудшему отклику. Введение контура, включающего идентификатор, модель объекта и третий блок памяти, дает возможность на каждом шаге оптимизации оценить истинные значения функции отклика в различных вершинах симплекса, правильно выбрать отражаемую вершину и тем самым снизить влияние неконтролируемых возмущений. Это повышает скорость и точность пои-ска. 1 ил. lO (/) GO 4 СЛ 05 ОО
Составитель А.Лащев Редактор А.Долинич Техред л.Сердюкова Корректор С.Черни
Заказ 4919/46 Тираж 863 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предпри; тие, г. Ужг ород, ул. Проектная, 4
| Система автоматической оптимизации | 1981 |
|
SU951237A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
