1 .13
Изобретение относится к наземным транспортным средствам, а именно к устройствам для обучения управлению технологическим процессом зерноуборочного комбайна.
Цель изобретения - повышение эффективности тренажа путем предотвращения формирования неправильных навыков.
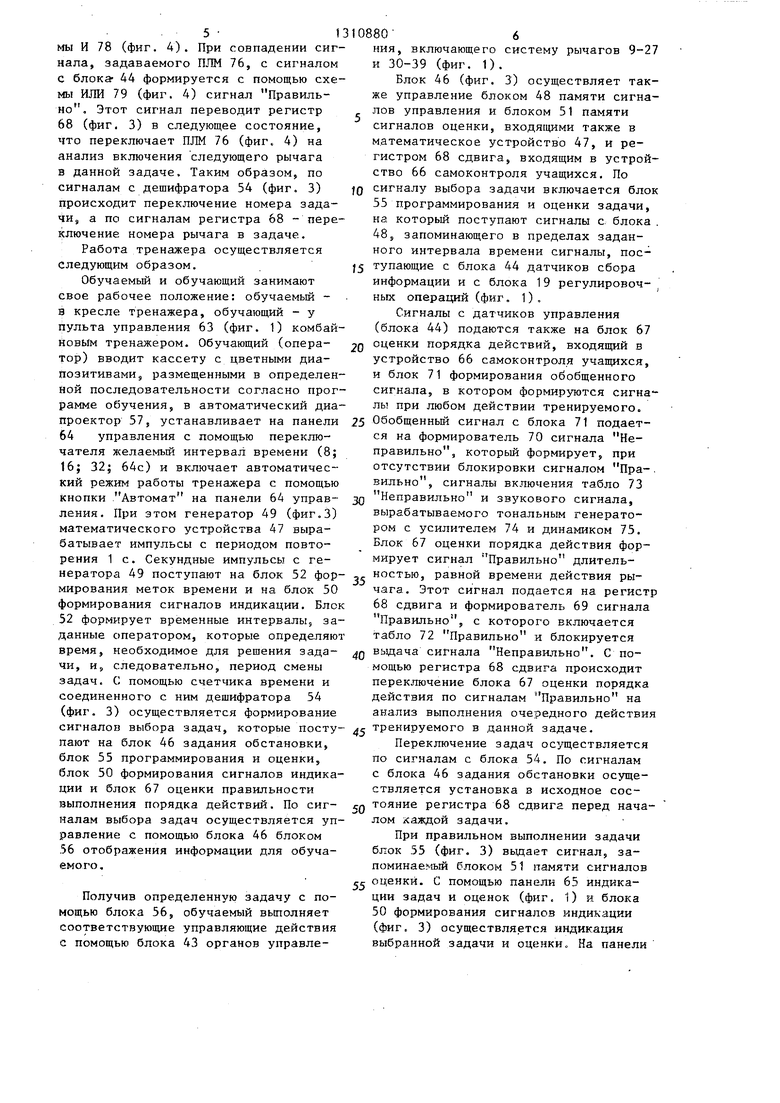
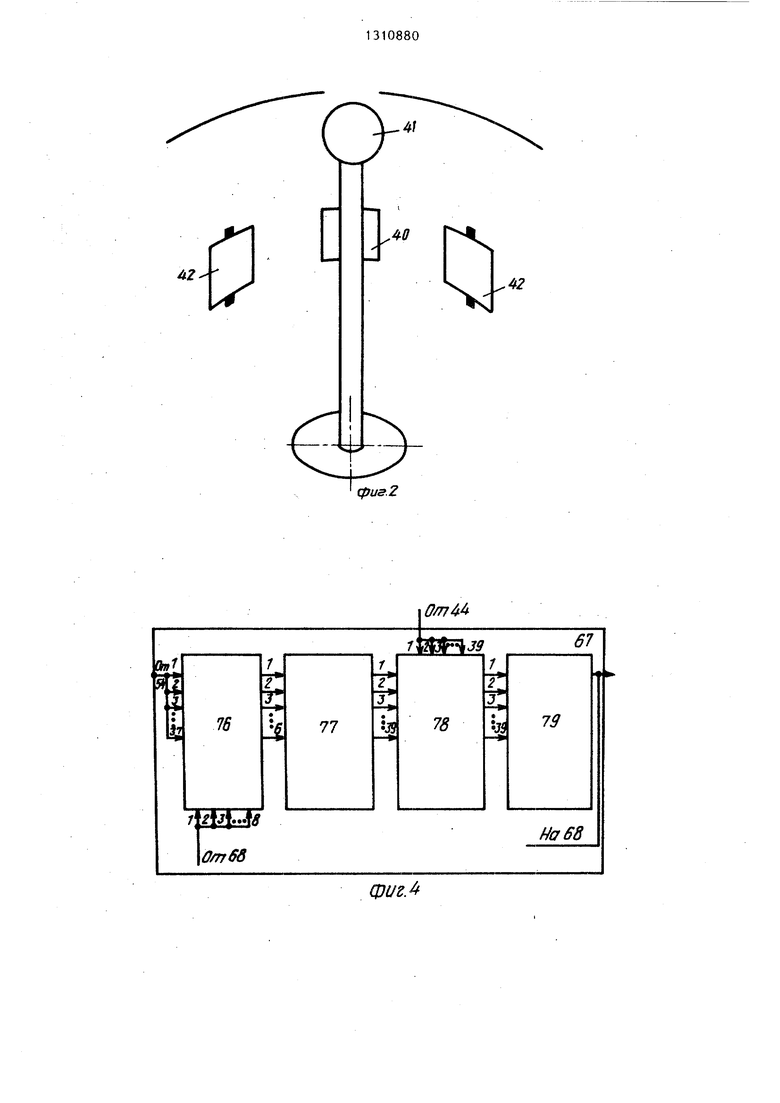
На фиг. 1 приведено устройство, общий вид; на фиг. 2 - имитатор механизмов регулировки технологического процесса рабочих органов; на фиг. 3 - функциональная схема устройства; на фиг. 4,5 - функциональные схемы программируемой логической матрицы.
Устройство содержит (фиг. 1) кабину 1 комбайна с органами управления вождением, включающими рулевое устройство 2, рычаг 3 переключения передач, педали Д основных колесных тормозов, педаль 5 сцепления ходовой части, рычаг 6 стояночного тормоза, рычаг 7 подачи топлива, с органами управления регулировочными механизмами рабочих органов комбайна, часть которых размещена на панели 8, смонтированной на одной из стенок кабины 1 . В частности, на данной панели расположены рычаги: 9 регулирования частоты вращения мотовила или подборщика, 10 подъема и опускания жатки, 11 подъема и опускания мотовила, 12 вариатора ходовой части, 13 регулирования выноса мотовила, 14 включения вибратора бункера, 15 включения выгрузки зерна, открытия жалюзи удлинителя 16, 17 открытия жалюзи верхнего решета, 18 нижнего решета, 19 регулирования частоты вращения вентилятора 20, зазора между пальцами шнека и днищем жатки 20, 21 зазора между барабаном и декой, 22 включения сцепления двигателя на привод рабочих органов комбайна, 23 привода жатки,
24регулирования частоты вращения молотильного барабана, а также Педаль
25выгрузки соломы, задатчик 26 подачи хлебной массы, механизм 27 ручного управления скоростью комбайна.
Кроме того, часть рычагов управления регулировочными механизмами выполнена в виде кнопочных переключателей 28, расположенных на панели блока 29 регулировочных операций и соответствующих следующим регулировкам: Отклонить пальцы граблин назад на 15-30, снять планки 30; Герметизировать транспортируницие органы 31;
8802
Осмотреть колосовой и зерновой шнеки, элеватор, соломотряс и забившийся орган очистить 32; Зазор между спиралями шнека и днищем жатки уменьшить 33; Зазор между спиралями шнека и днищем жатки увеличить 34; Отрегулировать натяжение пружин уравновешивающего механизма жатки 35; Увеличить наклон удлинителя 36;
0 Опустить башмаки 37; Приблизить башмаки к жатке помощью гидроцилиндра дозакрыть клапан копните-. ля 39.
5 Кабина оснащена также имитаторами механизмов регулировки технологического процесса рабочих органов (фиг.2) в таком количестве, что каждому рычагу управления соответствует свой ме- 0 ханизм. (на фиг. 1 данные не показаны). Эти имитаторы выполнены (фиг.2) в виде магнита 40, укрепленного на рычаге 41, и датчиков-герконов 42, находящихся в диапазоне перемещения
5 магнита 40.
Устройство содержит блок 43 органов управления, блок 44 датчиков сбора информации, контрольно-задающую систему 45, включаюш,ую блок 46 зада0 ния обстановки, математическое устройство 47 обработки информации с блоком 48 памяти сигналов управления, генератором 49 секундных импульсов, блоком 50 формирования сигналов ин2 дикации, блоком 51 памяти сигналов оценок, блоком 52 формирования меток времени со счетчиком 53 времени, дешифратором 54, блоком 55 программирования и оценки. В контрольно-зада0 ющую систему 45 входит также блок 56 отображения информации для обучаемого с проектором 57 и экраном 58, указателем 59 потерь зерна, блоком 60 сигнализации комбайна и командным
45 табло 61, задающим название команд или задач и информацию о правильности выполнения каждой задачи на световом экране 62.
К контрольно-задающей системе от50 носится и пульт 63-управления с блоком отображения информации для обучающегося, включающий панель 64 управления и панель 65 индикации задач и оценок.
55 При этом генератор секундных импульсов подключен одним выходом к блоку формирования сигналов индикации, а другим - по одной цепи через блок формирования меток времени к .
блоку задания обстановки, выходы которого подключены к блоку отображения информации для обучаемого, к блокам памяти сигналов управления и сигналов оценок, а по другой цепи через счетчик меток времени к дешифратору, один из выходов которого связан с входом блока формирования сигналов индикации, другой - с входом блока задания обстановки, третий - с входом блока программирования и оценки, выход которого связан с входом блока памяти сигналов оценки, а один из входов - с выходом блока памяти сигналов управления, через входы которого с математическим устройством связаны блок датчиков и блок регулировочных операций.
Дополнительно в контрольно-задающую систему 45 введено устройство 66, самоконтроля учащихся, содержащее блок 67 оценки порядка действий, представляющий собой конечньй автома без памяти, выполненный на микросхе-, мах серии К 133, один вход которого подключен к выходу блока 44 датчиков сбора информации, второй - к дешифратору 54, третий - к выходу регистра 68 сдвига, выполненного на базе микросхемы средней интеграции К 133, представляющего собой реверсивный 8- разрядный регистр сдвига, один вход которого связан с выходом блока 46 задания обстановки, а другой - с блоком 67, соединенным своим выходом с входом формирователя 69 сигнала Правильно и через него с входом формирователя 70 сигнала Неправильно, представляющих собой ждущие мультивибраторы, один вход подключен к вы- ходу формирователя 71 обобщенного сигнала, выполненного на диодной схеме, реализующей функцию логического
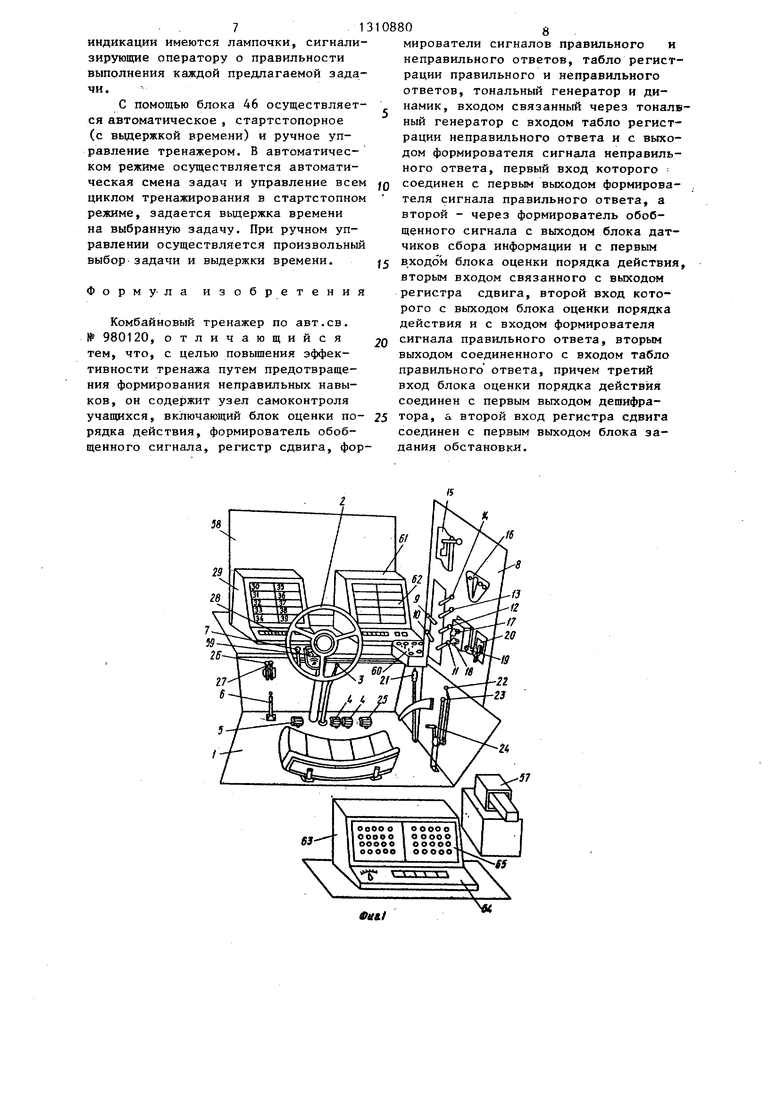
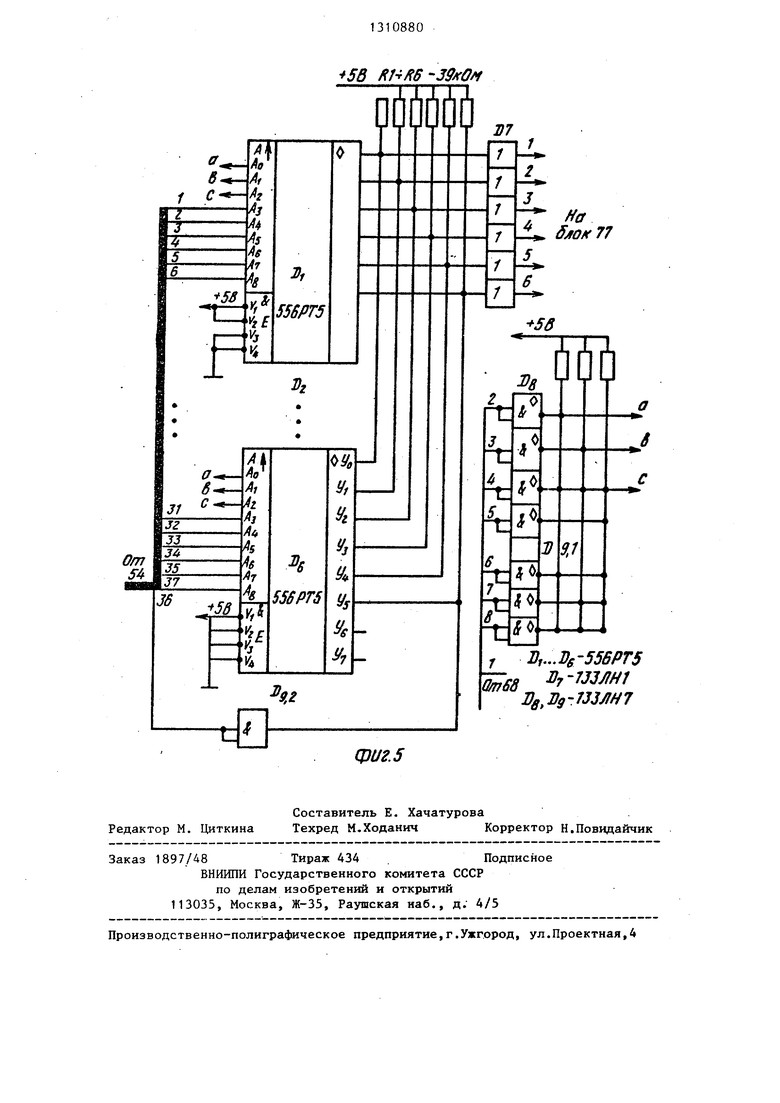
ГШМ 76 представляет собой комбинационную логическую схему и является микропрограммным устройством, задающим порядок анализа включения рычагов. ПЛМ 76 (фиг. 5) выполнена на шести микросхемах серии К 556 РТ 5, представляющих собой постоянное прогсложения сигналов, поступающих с блока датчиков 44 сбора информации, вы- 45 раммируемое запоминающее устройство ходы формирователей 69 сигналов Пра- (ППЗУ) емкостью 4096 бит. В ППЗУ с вштьно и 70 Неправильно соединены
соответственно с табло 72 Правильно и с табло 73 Неправильно, формирователь 70 подключен также к му генератору с усилителем 74 НЧ, выполненному на микросхемах К174 УН7, и через него к динамику 75.
Конструктивно блок оценки порядка
помощью специального стенда занесена информация о порядке включения рычагов комбайна в каждой предложенной тонально-50 технологической ситуации-задаче. На входы ПЛМ подается 37-разрядный код задач с дешифратора 54 (фиг. 3) и 8-разрядный код рычага в задаче с регистра 68. По этим сигналам ППМ
действий представляет собой устройст-55 (Фиг. 5) выдает 6-разрядный код номе- во с платами, выполненными на микро- ра анализируемого рычага на дешифра- схемах средней интеграции серии К 133. тор 77 (фиг. 4). С дешифратора 77 функционально блок представляет собой и с блока. 44 датчиков сбора информа- программирлогический автомат, позво- дни (фиг. 3) сигналы подаются на схеfO
f5
0
э, 0
ляющий фиксировать во времени порядок срабатывания датчиков регулировок и рычагов комбайна и сравнивать с программой, заложенной в этом блоке. Блок позволяет фиксировать в запоминающем устройстве правильный и неправильный порядок действий органами управления и рычагами технологических регулировок комбайна, а также индицировать все срабатывания-датчиков органов управления и рычагов.
Блок 67 оценки порядка действий состоит из программируемой логической матри цы (ПЛМ) 76 (фиг. 4), выходы которой соединены с дешифраторам 77 рычага. Одни входы ПЛМ подключены к дешифратору 54 (фиг. 3), выходы которого задают номер задачи. Другие входы подключены к регистру 68, выходы которого задают порядок включения рычагов в каждой задаче. Выходы ПЛМ 76 (фиг. 4), представляющие собой двоичный код рычага в задаче, подключены к дешифратору 77, выходы которого
25 подключены к схемам 78 совпадения, на которые также подаются сигналы от блока 44 датчиков сбора информации (фиг. 3). Выходы схем 78 совпадения (фиг. 4) собираются с помощью схемы
Q ИЛИ 79, вход которой подключен к регистру 68 (фиг. 3). Сигнал со схемы ИЛИ 79 (фиг. 4) представляет собой сигнал Правильно. Все устройства с блока 67 выполнены на комбинацион- ных микросхемах серии К 133.
Блок 67 оценки порядка действий работает следующим образом.
ГШМ 76 представляет собой комбинационную логическую схему и является микропрограммным устройством, задающим порядок анализа включения рычагов. ПЛМ 76 (фиг. 5) выполнена на шести микросхемах серии К 556 РТ 5, представляющих собой постоянное прог5 раммируемое запоминающее устройство (ППЗУ) емкостью 4096 бит. В ППЗУ с
. 5
мы И 78 (фиг, 4). При совпадении сигнала, задаваемого ПЛМ 76, с сигналом С блока- 44 формируется с помощью схемы ИЛИ 79 (фиг. 4) сигнал Правильно, Этот сигнал переводит регистр 68 (фиг, 3) в следующее состояние, что переключает ПЛМ 76 (фиг. 4) на анализ включения следующего рычага в данной задаче. Таким образом, по сигналам с дешифратора 54 (фиг. 3) происходит переключение номера задачи, а по сигналам регистра 68 - переключение номера рычага в задаче.
Работа тренажера осуществляется Следующим образом.
Обучаемый и обучающий занимают свое рабочее положение: обучаемый - в кресле тренажера, обучающий - у пульта управления 63 (фиг, 1) комбайновым тренажером. Обучающий (оператор) вводит кассету с цветными диапозитивами, размещенными в определенной последовательности согласно программе обучения, в автоматический диапроектор 57, устанавливает на панели 64 управления с помощью переключателя желаемый интервал времени (8; 16; 32; 64с) и включает автоматический режим работы тренажера с помощью кнопки Автомат на панели 64 управления. При этом генератор 49 (фиг,3) математического устройства 47 вырабатывает импульсы с периодом повторения 1 с. Секундные импульсы с генератора 49 поступают на блок 52 формирования меток времени и на блок 50 формирования сигналов индикации. Блок 52 формирует временные интервалы, заданные оператором, которые определяют время, необходимое для решения задачи, и, следовательно, период смены задач. С помощью счетчика времени и соединенного с ним дешифратора 54 (фиг. 3) осуществляется формирование сигналов выбора задач, которые поступают на блок 46 задания обстановки, блок 55 программирования и оценки, блок 50 формирования сигналов индикации и блок 67 оценки правильности выполнения порядка действий. По сигналам выбора задач осуществляется управление с помощью блока 46 блоком 56 отображения информации для обучаемого .
Получив определенную задачу с помощью блока 56, обучаемый выполняет соответствующие управляющие действия с помощью блока 43 органов управле80-6
ния, включающего систему рычагов 9-27 30-39 (фиг. 1),
Блок 46 (фиг, 3) осуществляет таке управление блоком 48 памяти сигналов управления и блоком 51 памяти сигналов оценки, входящими также в математическое устройство 47, и регистром 68 сдвига, входящим в устройство 66 самоконтроля учащихся. По
сигналу выбора задачи включается блок 55 программирования и оценки задачи, на который поступают сигналы с блока . 48, запоминающего в пределах заданного интервала времени сигналы, поступающие с блока 44 датчиков сбора информации и с блока 19 регулировочных операций (фиг. 1),
Сигналы с управления (блока 44) подаются также на блок 67
оценки порядка действий, входящий в устройство 66 самоконтроля учащихся, и блок 71 формирования обобщенного сигнала, в котором формируются сигналы при любом действии тренируемого.
Обобщенньш сигнал с блока 71 подается на формирователь 70 сигнала Неправильно, который формирует, при отсутствии блокировки сигналом Пра-. вильно, сигналы включения табло 73
Неправильно и звукового сигнала, вырабатываемого тональным генератором с усилителем 74 и динамиком 75, Блок 67 оценки порядка действия формирует сигнал Правильно длительностью, равной времени действия рычага. Этот сигнал подается на регистр 68 сдвига и формирователь 69 сигнала Правильно, с которого включается табло 72 Правильно и блокируется
вьщача сигнала Неправильно. С помощью регистра 68 сдвига происходит переключение блока 67 оценки порядка действия по сигналам Правильно на анализ выполнения очередного действия
тренируемого в данной задаче.
Переключение задач осуществляется по сигналам с блока 54, По сигналам с блока 46 задания обстановки осуществляется установка з исходное сос- тояние регистра 68 сдвига перед началом каждой задачи.
При правильном выполнении задачи блок 55 (фиг. 3) вьщает сигнал, за- поминае 1ый блоком 51 памяти сигналов оценки. С помощью панели 65 индикации задач и оценок (фиг. 1) и блока 50 формирования сигналов индикации (фиг. 3) осуществляется индикация выбранной задачи и оценки. На панели
индикации имеются лампочки, сигнализирующие оператору о правильности выполнения каждой предлагаемой задачи .
С помощью блока 46 осуществляется автоматическое , стартстопорное (с вьщержкой времени) и ручное управление тренажером. В автоматическом режиме осуществляется автоматическая смена задач и управление всем циклом тренажирования в стартстопном режиме, задается вьщержка времени на выбранную задачу. При ручном управлении осуществляется произвольный выбор задачи и выдержки времени.
Формула изобретения
Комбайновый тренажер по авт.св. № 980120, отличающийся тем, что, с целью повышения эффективности тренажа путем предотвращения формирования неправильных навыков, он содержит узел самоконтроля учащихся, включающий блок оценки по- рядка действия, формирователь обобщенного сигнала, регистр сдвига, фор- дания обстановки.
мирователи сигналов правильного и неправильного ответов, табло регистрации правильного и неправильного ответов, тональный генератор и динамик, входом связанный через тоналв ный генератор с входом табло регистрации неправильного ответа и с выходом формирователя сигнала неправильного ответа, первый вход которого соединен с первым выходом формирова- теля сигнала правильного ответа, а второй - через формирователь обобщенного сигнала с выходом блока датчиков сбора информации и с первым в.ходо м блока оценки порядка действия вторым входом связанного с выходом регистра сдвига, второй вход которого с выходом блока оценки порядка действия и с входом формирователя сигнала правильного ответа, вторым выходом соединенного с входом табло правильного ответа, причем третий вход блока оценки порядка действия соединен с первым выходом дешифратора, а второй вход регистра сдвига соединен с первым выходом блока за
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| Устройство для контроля знаний обучаемых | 1983 |
|
SU1176362A1 |
| Устройство для контроля знаний обучаемых | 1987 |
|
SU1524082A1 |
| Устройство для контроля знаний обучаемого | 1988 |
|
SU1569864A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗНАНИЙ ОБУЧАЕМОГО | 1991 |
|
RU2037206C1 |
| Устройство для контроля знаний обучаемых | 1983 |
|
SU1111192A1 |
| Устройство для контроля знаний обучаемого | 1983 |
|
SU1119058A1 |
| СИСТЕМА ДИСТАНЦИОННОГО ОБУЧЕНИЯ СТУДЕНТОВ | 2006 |
|
RU2315364C1 |
| Устройство для контроля знанийОбучАЕМыХ | 1979 |
|
SU813491A1 |
| Устройство для обучения и контроля глубины знаний обучаемых | 1991 |
|
SU1789999A2 |
Изобретение относится к устройствам для обучения управлению технологическим процессом зерноуборочного комбайна и позволяет повысить эффективность обучения путем предотвращения формирования неправильных навыков. Блок 43 органов управления связан с 44 датчиков сбора ин- формавди и с контрольно-задающей системой 45, которая включает блок задания обстановки, математическое уст-, ройство 47 обработки информации с блоком 48 памяти сигналов управления. блок 50 формирования сигналов -индикации, блок 56 отображения информации для обучаемого, блок 60 сигнализации комбайна. Вход динамика 75 связан через тональньм генератор 74 с входом табло 73 регистрации неправильного ответа и с выходом формирователя 70 сигналов неправильного ответа, первый вход которого соединен с первым выходом формирователя 69 сигналов правильного ответа, а второй через формирователь 71 обобщенного сигнала - с выходом блока 44 датчиков сбора информации и с первым входом блока 67 оценки порядка действия (БОПД), вторым входом связанного с выходом регистра 68 сдвига, второй вход которого связан с выходом БОПД 67 и с входом формирователя 69 сигналов правильного ответа, вторым выходом соединенного с входом табло 72 регистрации правильного отпета, третий вход БОПД 67 соединен с первым выходом дешифратора 54, а второй вход регистра 68 сдвига соединен с первым выходом блока 46 задания обстановки. 5 ил. Q S ел оо 00 00 14) ft/r.3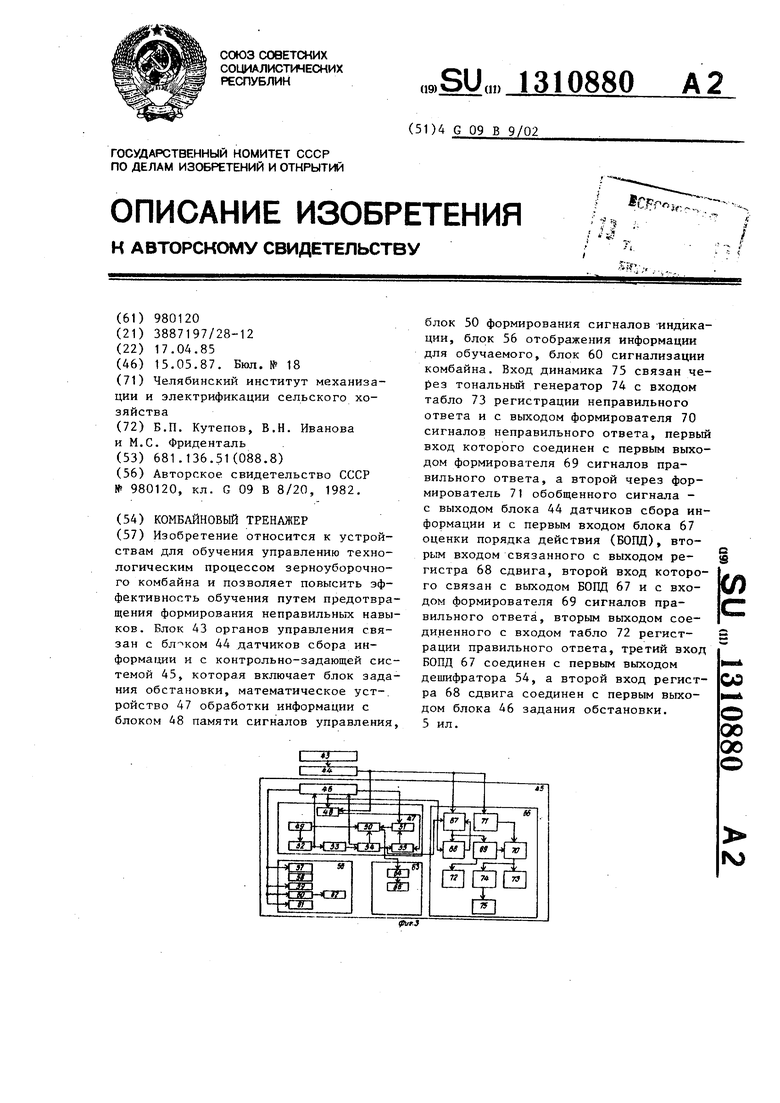
S8
16
Фил
4Z.
У
} Г%
X
.f
Q&:/5.2
1 /7744
.
fSB f 1-iK6 39ffO/i
Редактор М. Циткина
Составитель Е. Хачатурова
Техред М.Ходанич Корректор Н.Повидайчик
Заказ 1897/48 Тираж 434Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д; 4/5
Производственно-полиграфическое предприятие,г.Ужгород, ул.Проектная,4
фиг. 5
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
