Изобретение относится к электротехнике, может быть использовано в электронриводах с упругой механической передачей для устранения отрицательного влияння упругости на точность движения и является дополнительным к авт. св. N° 1262676.
Целью изобретения является повыншние точности работы системы.
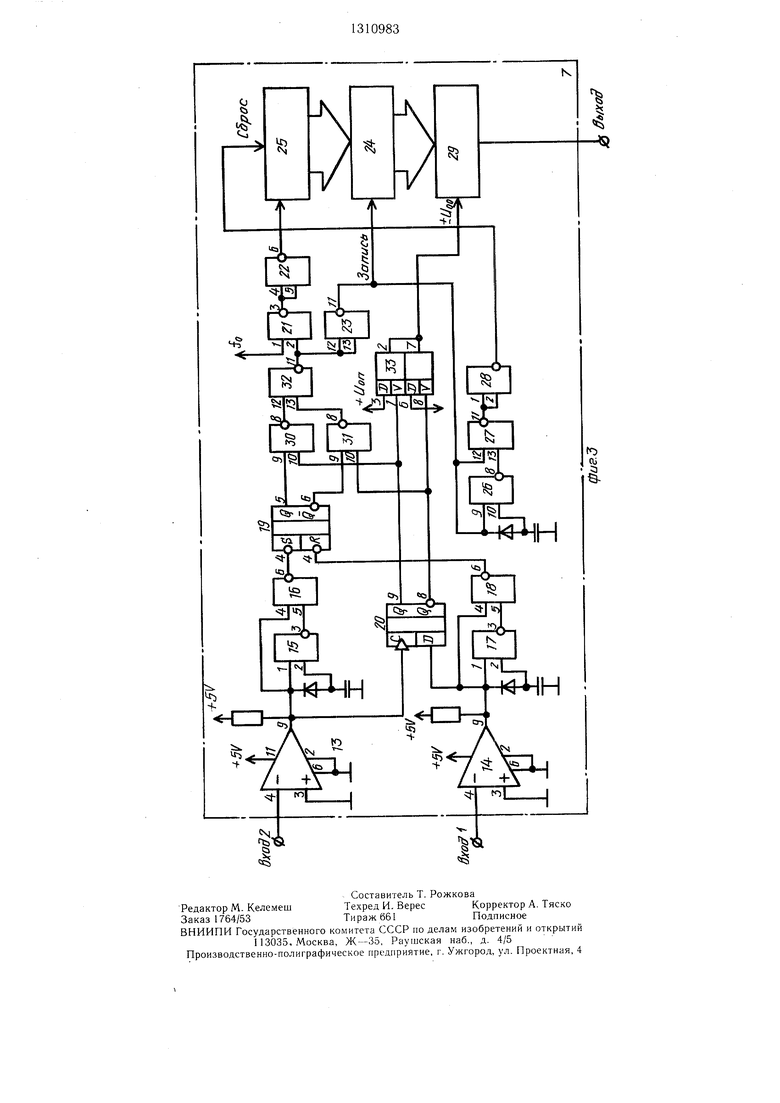
На фиг. 1 приведена функциональная схема системы управления электроприводом; на фиг. 2 - принципиальная схема первого (управляемого) полосового фильтра; на фиг. 3 - то же, фазового дискриминатора.
Система управления электроприводом содержит последовательно соединенные регулятор 1, электродвигатель с датчиком 2 частоты вращения, первый (управляемый) полосовой фильтр 3, формирователь 4 импульсов и блок 5 выборки-храпения, при этом первый вход, второй вход и выход блока 5 выборки-хранения подключены соответственно к выходу формирователя 4, выходу датчика 2 частоты вращения и к второму входу регулятора 1, первый вход которого является задающим, а первый вход и выход первого (управляемого) полосового фильтра 3 подключены соответственно к выходу датчика 2 частоты вращения и к входу формирователя 4. Кроме того, система управления электроприводом содержит второй полосОЕЮЙ фильтр 6, фазовый дискриминатор 7 и интегратор 8, при этом первый вход, второй вход и выход фазового дискриминатора 7 подключены соответственно к выходу первого полосового фильтра 3, к выходу второго полосового фильтра 6 и к входу интегратора 8, а выход интегратора 8 и вход второго полосового фильтра 6 подключены соответственно к унравляющёму входу первого полосового фильтра 3 и к выходу датчика 2 частоты врап;ения.
Система унравле1П1я электроприводом работает следующим образом.
Сигнал Uc(t) с выхода датчика 2 частоть вращения Uc(t)Un(t -}-Ui,,,,s n 2:if,it, содержащий, помимо полезиог о L ,4/) высокочастотную периодическую составляющую б ушХ Xsin2nf,,/ на частоте f,, упругого резонанса, поступает на вход первого полосового фи.льт- ра 3, который представляет собой остро- направленный узкополосный усилитель высокой добротности с нулевым фазовым сдвигом ЛФ1 только на центральной частоте F. значение которой регулируется по управляющему входу полосового фильтра 3. Выделенная и усиленная гармоническая составляющая и(t) с выхода нолосового фильтра 3 U,(t)U(f)sm 2лfyt + fl(f,;) поступает на вход формирователя 4 импульсов, формирующего на своем выходе в моменты времени t перехода синусоиды через нуль;
(2nf,)- /(..-Arp,(/,) , i, :.. импульсы управления, поступаюпше на первый (управляющий) вход блока 5 выборки- хранения. С приходом импульса управ. шния
с выхода формирователя 4 мгновенное значение сигнала с выхода датчика 2, поступающее на второй (сигнальный) вход блока 5 выборки-хранения, передается на выход
блока 5 (режим выборки) и запоминается до прихода следуюнлег о импульса управления (режим хранения). Если при этом полосовой фильтр 3 настроен точно на частоту f., упругого резонанса ,, то, поскольку
„ в этом случае A(.:i(/ ,y)A(pi(f )0, информа- цня с датчика снимается в моменты времени
(2/,)Л /(0, 1 когда U,-(t)Un(t),
т. е. когда сигнал Uc(t) с датчика не искажен
гармоникой на частоте упругого резонанса.
Второй полосовой фильтр 6 более низкой
добротности, чем первый полосовой фильтр 3 с параметрами: F - центральная частота, /II и fb - соответственно нижняя и верхняя 1 раиицы второго полосового фильтра 6, обеспечивает нулевой сдвиг фаз во всем диапазоне частот изменения частоты /,, упру0 того резонанса: Лф2()0 для ,, где fyy и j;,i, -- cooTijCTCTBenno нижняя и верхняя границы частот изменения f-/, что достигается разнесением частот -ц f,, Q.,,, и /fc) на октаву.
Если частота /„ упругого резонанса изменилась, то ус.ловие наручпается и, следовательно, сигнал, поступа1он1ий с выхода первого полосового фи.пьтра .3 -л пер- В1)1Й вход фазового дискршишатора 7, оказывается сдвинутым но фазе isa величину
0 (/ «) относительно cnrua ia, постунаюп1его с выхода второго полосового фильтра 6 на второй вход фазового дискриминатора 7. Измеренная разность сЬаз с выхода фазового дискриминатора 7 поступает через интегратор 3 на второй, у11равляюи1,кй положением
5 центральной частоты Р, вход первого полосового фильтра 6. Таким образом происходит подстройка на частоту / „ упругого резонанса, что обеспечивает правильность моментов снятия информации с вькхода датчика 2 частоты вращения п.ри изменении частоты
0
упругого резонанса.
Первый (управляемый)полосовой
фильтр 3 состоит из управляемого режек- торного фильтра на основе моста Вина, состояп его из усилителей 9, 10 и 11 (фиг. 2). Для всех частот, кроме частоты, определяемой активными и реактивными элементами моста Вина, усилитель 9 работает в режиме синфазного сигнала и на выходе уси ттеля 9 будет нулевой сигнал. Для частоты настройки моста Вина коэффициент неред,ачи ре- жекторного фильтра равен нулю, поэтому па инвертируюпшй вход усилителя 9 сигнал не поступает, следовательно, сигнал на выходе будет равен входному сигналу, поступающему на неинвер ирующий вход усилителя 9. Управление центральной чаетотой фильтра осуп1ествляется изменением напряжения, подаваемого на затворы полевых транзисторов микросхем 12, выполняюн1,их
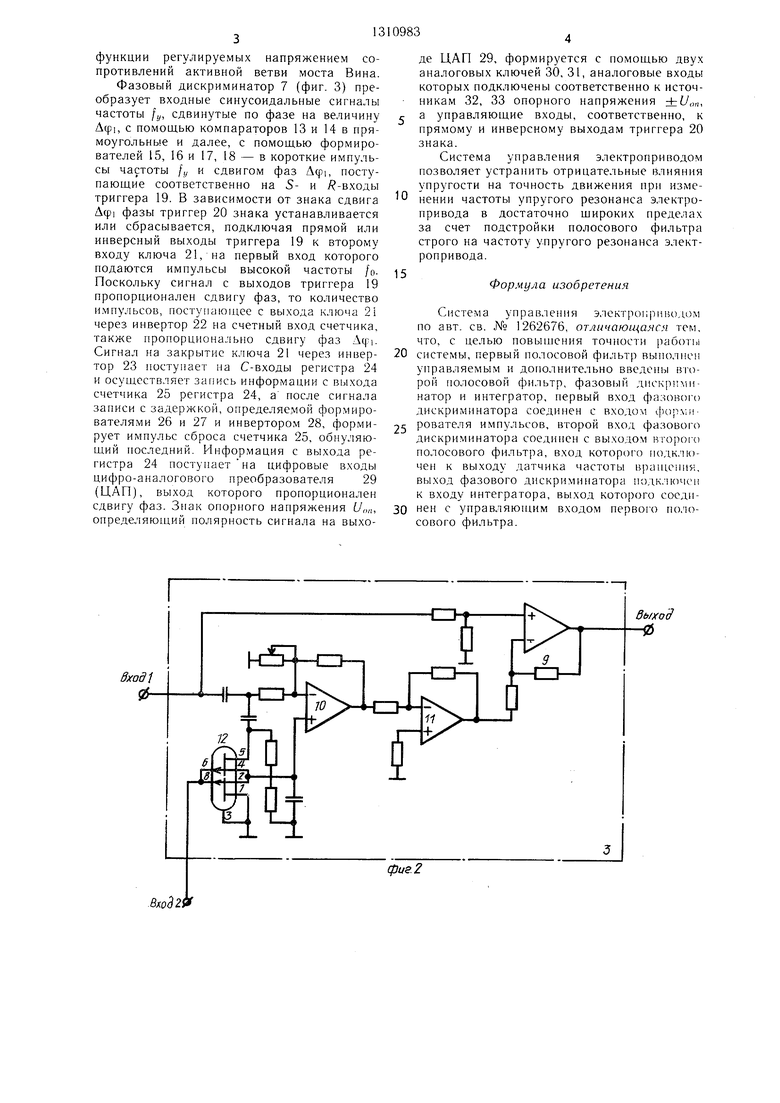
функции регулируемых напряжением сопротивлений активной ветви моста Вина. Фазовый дискриминатор 7 (фиг. 3) преобразует входные синусоидальные сигналы частоты /,,, сдвинутые по фазе на величину ДФ1, с помощью компараторов 13 и 14 в прямоугольные и далее, с помощью формирователей 15, 16 и 17, 18 - в короткие импульсы частоты fy и сдвигом фаз Дф1, поступающие соответственно на 5- и / -входы триггера 19. В зависимости от знака сдвига АФ1 фазы триггер 20 знака устанавливается или сбрасывается, подключая прямой или инверсный выходы триггера 19 к второму входу ключа 21, на первый вход которого подаются импульсы высокой частоты /о. Поскольку сигнал с выходов триггера 19 пропорционален сдвигу фаз, то количество и.мпульсов, поступающее с выхода ключа 21 через инвертор 22 на счетный вход счетчика, также пропорционально сдвигу фаз Афь Сигнал на закрытие ключа 21 через инвер- тор 23 поступает на С-входы регистра 24 и осундествляет запись информации с выхода счетчика 25 регистра 24, а после сигнала записи с задержкой, определяемой фор.миро- вателями 26 и 27 и инвертором 28, форми- рует импульс сброса счетчика 25, обнуляющий последний. Информация с выхода регистра 24 поступает на цифровые входы цифро-аналогового преобразователя 29 (ЦАП), выход которого пропорционален сдвигу фаз. Знак опорного напряжения (У,,,,, определяющий полярность сигнала на выходе ЦАП 29, формируется с помощью двух аналоговых ключей 30, 31, аналоговые входы которых подключены соответственно к источникам 32, 33 опорного напряжения ±iJm,, а управляющие входы, соответственно, к прямому и инверсному выходам триггера 20 знака.
Система управления электроприводом позволяет устранить отрицательные влияния упругости на точность движения при изменении частоты упругого резонанса электропривода в достаточно щироких пределах за счет подстройки полосового фильтра строго на частоту упругого резонанса электропривода.
Формула изобретения
Система управления электроприводом по авт. св. Afo 1262676, отличающаяся тем, что, с целью повьипения точности работы системы, первый полосовой фильтр выполнен управляемым и дополнительно введены второй полосовой фильтр, фазовый дискриминатор и интегратор, первый вход фазового дискриминатора соединен с входом формирователя импульсов, второй вход фазового дискриминатора соединен с выходом вгорО1Ч) полосового фильтра, вход которого подключен к выходу датчика частоты вран1еп11я, выход фазового дискриминатора подключен к входу интегратора, выход которого соединен с управляюп1им входом первого полосового фильтра.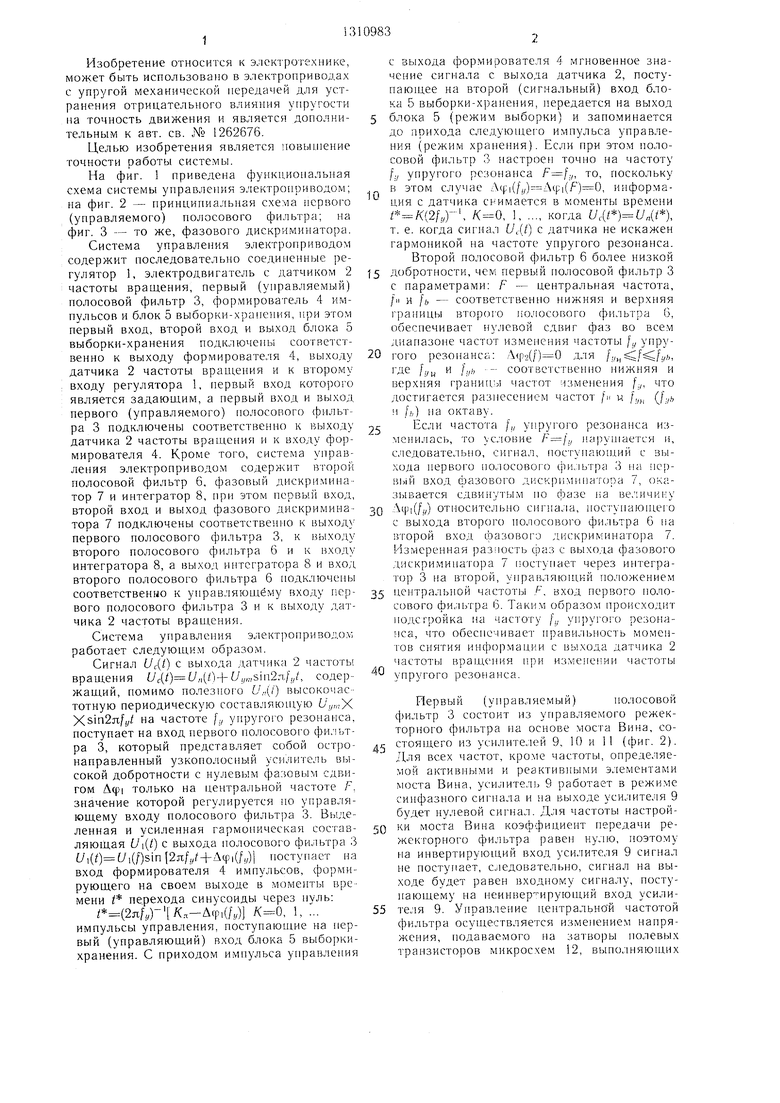
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Частотный дискриминатор | 1982 |
|
SU1116527A1 |
| Устройство контроля комбинационных составляющих сигнала нелинейного четырехполюсника | 1985 |
|
SU1264111A1 |
| Система управления электроприводом | 1985 |
|
SU1262676A1 |
| Цифроаналоговое устройство слежения за задержкой псевдослучайной последовательности импульсов | 1982 |
|
SU1083390A1 |
| Устройство приема сигналов с двукратным разнесением | 1983 |
|
SU1092741A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
Изобретение относится к электротехнике, может быть использовано в электро7 приводах с упругой механической передачей и является дополнительным к авт. св. № 1262676. Целью изобретения является повышение точности работы системы. Система содержит управляемый полосовой фильтр 3, полосовой фильтр 6, фазовый дискриминатор 7. С выхода фазового дискриминатора 7 при изменении частоты упругого резонанса на управляющий вход полосового фильтра 3 через интегратор 8 поступает сигнал, пропорциональный сдвигу фаз между сигналами от полосовых фильтров 3, 6. Это обеспечивает подстройку полосового фильтра 3 на частоту упругого резонанса и, как следствие, правильность снятия информации с выхода датчика 2 частоты вращения. 3 ил. -в Z S з: 7 / 00 о со ОС ОО го
| Система управления электроприводом | 1985 |
|
SU1262676A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
