(54) УСТРОЙСТВО КОРРЕКЦИИ ДЛЯ КОМПЕНСАЦИИ УПРУГОГО РЕЗОНАНСА В ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМАХ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| УСТРОЙСТВО для НЕЛИНЕЙНОЙ КОРРЕКЦИИ ПАРАЛТ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯETT4JD | 1971 |
|
SU310233A1 |
| Самонастраивающийся регулятор | 1979 |
|
SU847273A1 |
Изобретение относится к автоматическому регулированию i может быть использовано в электромеханических системах с упругими механическими связями..
Известно устройство коррекции для компенсации отрицательного влияния упругих СВОЙСТВ механических передач, в котором в контур регулирования скорости электропривода с упругой механической передачей последовательно включены регулятор скорости и корректирующее звено. Передаточная функция корректирующего звена является обратной передаточной функции части объекта регулирования, обусловленной наличием упругих связей. Настройка коррекции производится точно на частоту механического резонанса. Устройство обладает возможностью увеличения быстродействия и динамической точности системы 1.
Однако ввиду 1алого коэффициента демпфирования упругих колебаний ( 0,01-0,1) настройка корректирующего эвена будет крайне чувствительной к изменениям параметров механического резонанса, что безусловно имеет место в процессе эксплуатации и, если не производить перенастройку корректирующего звена, в контуре регулирования возникнут значительные по амплитуде колебания на частоте механического резонанса.
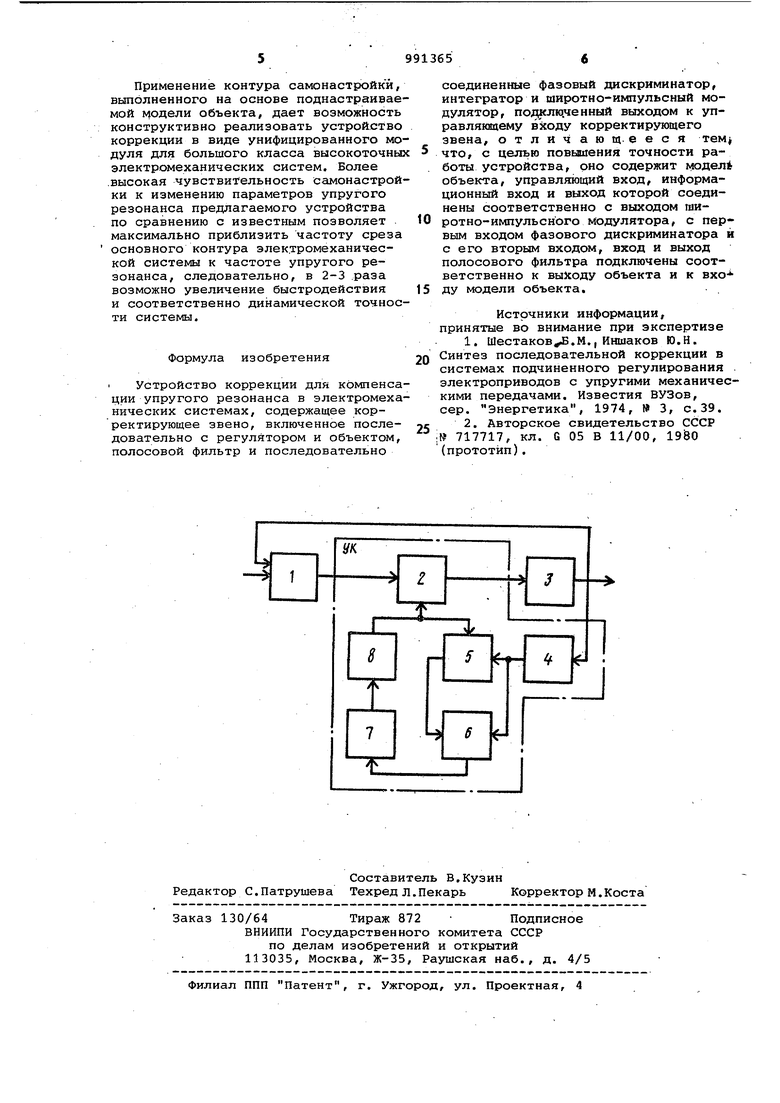
Наиболее близким по технической сущности к предлагаемому изобретению является устройство коррекции, в котором компенсация механического резонанса осуществляется корректирую10щим звеном, оснащенным контуром самонастройки, содержащим фазовый дискриминатор, интегратор, широтно-импульсный модулятор и два полосоЬых фильтра, входы которых соединены с входом
15 и выходом корректирующего эвена, выходы соединены с входами фазового дискриминатора, выход интегратора соединен с входом широтно-импульсного модулятора, выход которого соеди20нен с управляющим входом корректирующего звена. Настройка устройства на частоту механического резонанса производится путем измерения фазового рассогласования между входом и выхо25дом корректирующего звена с помощью фазового дискриминатора, выработкой управляющего воздействия через интегратор и широтно-импульсный модулятор и последующей перенастройкой парамет30ров корректирующего звена с помощью ключей. Полосовые фильтры служат, для выделения из системы сигналов, составляющих на частоте механического резонанса 2 1 Известное устройство имеет следую щие недостатки: трудно поддается измерению сигнал на выходе корректирую щего звена, при незначительных откло нениях параметров механического резонанса амплитуда сигнала на выходе корректирующего звена (на частоте резонанса) практически находится на уровне шумов контур самонастройки может потерять управляемость при скачкообразном изменении резонансной частоты, так как рабочий участок фазочастотной характеристики корректирующего звена (на котором формируется управляющий сигнал) имеет относительно узкую область. При коэффи циентах .демпфирования корректирующего звена - 0,01-0,1 скачкообразное изменение резонансной частоты, в лучшем случае, не должно превышать 40% от ее первоначального значения. Цель изобретения - повышение точности работы устройства. Поставленная цель достигается тем что в устройство коррекции, содержащее корректирующее звено, включенное последовательно с регулятором и объектом, полосовой фильтр и последовательно соединенные фазовый дискриминатор, интегратор и широтно-импульсный модулятор, подключенный выходом к управляющему входу корректирующего звена, введена модель объекта, управляющий вход, информационный вход и выход которой соединены соответственно с выходом широтно-импульс ного модулятора, с первым входом фазового дискриминатора и с его вторым входом, вход и выход полосового фильтра подключены соответственно к выходу объекта и к входу модели Объекта. На чертеже приведена функциональная схема системы с устройством коррекции (УК), обведенным пунктирной линией. Устройство содержит регулятор 1, корректирующее звено 2, объект 3, полосовой фильтр 4, модель 5 объекта, фазовый дискриминатор 6, интегратор 7, широтно-импульсный модулятор 8. Устройство коррекции работает еле дующим образом. Выходной сигнал с объекта 3 посту пает через полосовой фильтр 4 на модель 5 объекта. Сигналы, измеряемые на входе и выходе модели 5 объекта, подаются на входы фазового дискриминатора 6, который определяет фазовое рассогласование (фазовый сдвиг) Л 4 между входом и выходом модели 5 объекта. Интегратор 7 формирует упавляющее воздействие в соответствии со знаком и величиной фазового сдвига и исходя из условия - Де кущие значения соответственно частоты механического резонанса и параметров корректирующего звена 2 и модели 5 объекта. Исполнительным элементом, перенастраивающим параметры корректирующего звена 2 и модели 5 объекта, является импульсный перемножитель , состояЕдий из широтно-импульсного модулятора 8 и электронных ключей, находящихс;я на управляющих входах блоков 2 и 5. Сущность применения модели объекта в контуре самонастройки корректирующего устройства поясняется при рассмотрении передаточной функции объекта. Передаточная функция механического объекта с упругой связью в первом приближении может быть представлена колебательным звеном. Л т- . 1 . ,,p4 где uJy - частота зшругого резонанса механического звена; fv; - коэффициент демпфирования. Особенностью колебательного звена является резко выраженная зависимость фазового сдвига Гс1рмонических сигналов на входе и выходе звена в области частот резонанса. Это свойство и нашло применение в получении.надежной информации для работы контура самонастройки. Передаточная функция модели объекта 5 имеет вид Т р 25мТмР+ где Т - постоянная времени модели, поднастраиваемая в процессе работы; коэффициент демпфирования модели, варьируемый в широком диапазоне. . При нормальной настройке (Тм Ту) сдвиг по фазе на частоте резонанса между входным и выходным сигналами модели объекта равен - При изменении частоты резонанса изменится сдвиг по фазе --у ± При увеличении частоты получим отрицательное приращение фазы, при уменьшении частоты - положительное приращение фазы. Фазовый дискриминатор б настроен таким образом, чтобы иметь нулевой сигнал на выходе при рассогласовании фаз входных сигналов на величину--j-. Применение контура самонастройки, вьтолненного на основе поднастраиваемой модели объекта, дает возможность конструктивно реализовать устройство коррекции в виде унифицированного модуля для большого класса высокоточньах электромеханических систем. Более .высокая чувствительность самонастройки к изменению параметров упругого резонанса предлагаемого устройства по сравнению с известным позволяет максимально приблизить частоту среза основного контура электромеханической системы к частоте упругого резонанса, следовательно, в 2-3 .раза возможно увеличение быстродействия и соответственно динамической точности системы. Формула изобретения Устройство коррекции для компенсации упругого резонанса в электромеханических системах, содержащее корректирующее звено, включенное последовательно с регулятором и объектом, полосовой фильтр и последовательно соединенные фазовый дискриминатор, интегратор и широтно-импульсный модулятор, подклк,ченный выходом к управляющему входу корректирующего звена, отлич ающееся тем что, с целью повшиения точности работы устройства, оно содержит моделА объекта, управляющий вход, информационный вход и выход которой соединены соответственно с выходом широтно-импульсного модулятора, с первым входом фазового дискриминатора и с его вторым входом, вход и выход полосового фильтра подключены соответственно к выходу объекта и к модели объекта. Источники информации, принятые во внимание при экспертизе 1.Шестаков.М., Иншаков Ю.Н. Синтез последовательной коррекции в системах подчиненного регулирования . электроприводов с упругими механическими передачами. Известия ВУЗов, сер. Энергетика, 1974, 3, с.39. 2.Авторское свидетельство СССР № 717717, кл. G 05 В 11/00, 1980 (прототип).
