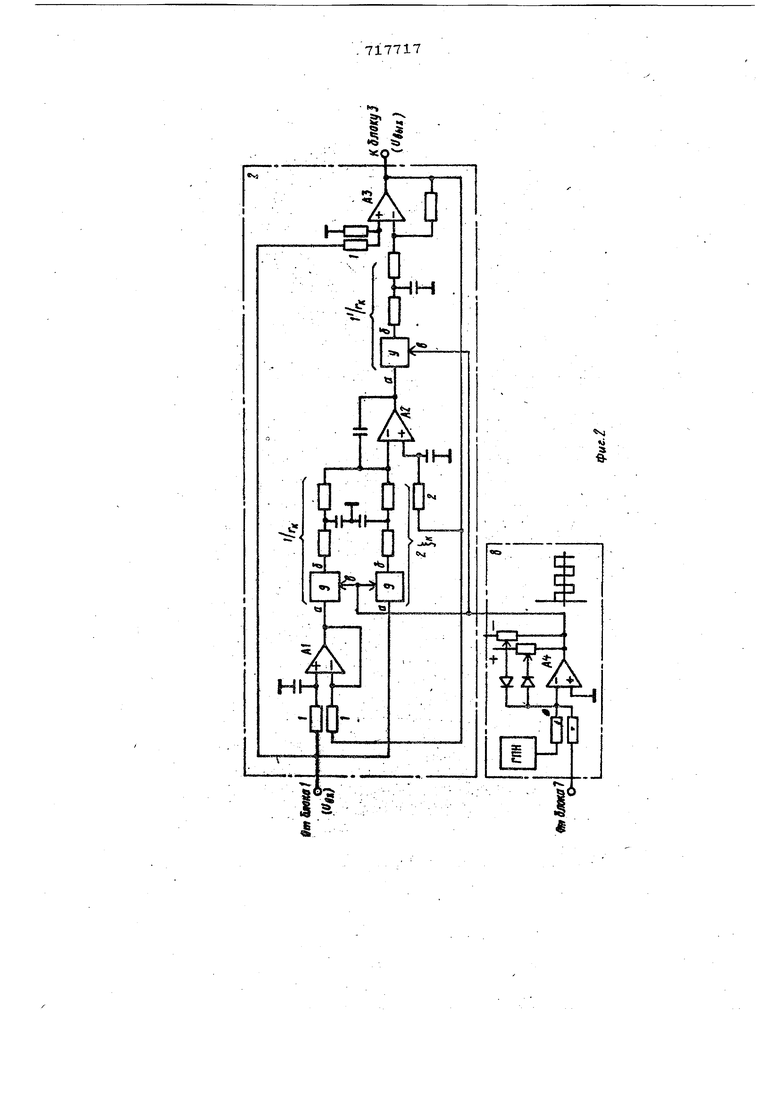
(54) СИСТЕМА УПРАВЛЕНИЯ С УПРУГОЙ МЕХАНИЧЕСКОЙ СВЯЗЬЮ 371 частоте резонанса являются крайне чувствительньгми к изменению параметров механического резонанса. Последнее происходит как следствие эксплуатйционных изменений податливостей элементов- конструкции, так и в следствии изменений масс (моментов инерции) механизма, И если при этих условиях не производится перенастройка корректирующего звена вконтуре регулирования возни- каю значительные по амплитуде колебания на частоте механического резонанса. Из известных устройств наиболее близ кой потехнической сущности к предлагае мому изобретению является устройство t содержащее последовательно соединенные регулятор, корректирующее звено и объек управления, а также последовательно соединенные фазовый дискриминатор и интегратор, где производится экстремаль- ная настройка контура на резонансную частоту путем измерения косинуса угла рассогласования сигналов на входе и выходе блока и его последузощего интегрирования для выработки управляющего сигнала, настраивающего контур в резонанс. Недостатком известного устройства .ел дует, считать то, что оно неудовлетворительно работает прн наличии упругих связей. Целью настоящего изобретения является повышение точности работы устройства коррекции и исключение автоколебаний на частоте механического резонанса прн изменении параметров механического резонанса. Поставленная цель достигается тем, что устройст во содержит широтно-импуль сный модулятсф и два полосовых фильтра входы которых соединены соответственно со входом и выходом корректирующего звена, e выходы соединены со входами фазового дискриминатора; выход интегратора соединен со входом шцротно-импулнэсного модулятора, выход которого соединен с управляющим входом корректирующего звена. Блок-схема устройства приведена на фиг. 1, где приняты следую щие обозначения: регулятор 1, корректирующее звено 2, объект 3 управления с упругой механической связью, полосовые фильтры 4, 5, фазовый дискриминатор 6, интегратор 7, широтно-импульсный модулятор 8. На фиг. 2 приведены схемы блоков 2 И 8, Контур регулирования, функционирую щий в реальных условиях, подвергается воздействию возмущений и помех,и при .4 отсутствии однозначного согласования корректирующего звена и упругого механического объекта на частоте механического резонанса возникают колебания или автоколебания, приводящие к значительным динамическим ошибкам системы. Механические объекты с упругими связями мргут в Первом приближении представляться двухмассовыми системами и описываться уравнениями колебательного звена. Передаточная функция такого звеТ у ш. T.V2 где oj - частота резонанса упругого механического звена, у - коэффициент демпфирования. В большинстве случаев упругие механические связи и характеризуются малыми коэффициентами демпфирования. Значения находятся в пределах 0,01 f 0,1. Настройка корректирующего звена с передаточной функцией ,, с%р производится из условия ( Коэффициенты демпфирования У и в o6meivr случае могут не совпадать. Значение устанавливается близким у из условий нормальной работы устройства коррекции и требуемого качества системы. Особенностью такого корректирующего звена является резко выраженная зависимость фазового сдвига дЧк гаромонических . сигналов на входе и выходе звена в области частоты резонанса. Это свойство и использовано для автоматической настройки корректирующего звена в соответствии с параметрами объекта по частоте резонанса си При нормальной настройке { t ТУ ) сдвиг по фазе на частоте зезонанса между выходным и входным сигналами корректирующего звена равен нулю. При изменении частоты резонанса резко изменяется сдвиг по фазе . При увеличении частоты он положителен, при уменьшении - отрицателен. В соответствии со знаком и величиной фазового сдвига л (ujy ) происходит автоматическая перенастройка параметров корректирующего звена так, что всегда выполняется условие 1/tiM uJyi , где (xiyi и - текущие значения частоты механического резонанса и частоты Компенсации корректирующего звена. С этой целью и функционирующей системе.из спектров выходного и входного сириалои корректирующяго звена полосовыми фильтрами выделяются составляющие на частоте механического ревонанса и пoдaюfcя на два входа фазового дискриминатора. Ма выходе фазо-. вого дискриминатора формируют сигнал пропорциональной равности фаз входных сигналов, который через интегратор, широтно-импульсный модулятор и ключи так воздействуют на параметры корректирую- щего звена, чтобы сдвиг по фазе на частоте резонанса был равен О. Схема работает следующим образом. Сигнал с выхода интегратора поступает на широтно-импульсный модулятор .(ШИМ), состоящий из ,генератора пилообразного напряжения (ГПН) и компаратора на операционном усилителе А4, и подключенный к управляющим входам клю чевых схем .9- Изменением сква}кности ШИМпроизводится регулировка эквива-:ленуной проводимости каждого из 3-х варьируемых параметров схемы корректирующего звена 2. Корректирующее звено имеет три перенастраиваемых параметра ((фиг. 2). Схема звена реализует передаточную функ цию (1). Перенастройка.активных провод мостей в схеме звена соответствует пе) ренастройке постоянного времени -г передаточной функции. Варьируемые параметры связаны со скважностью работы ключей Линейно. Необходимость перенастройки трех параметров на схеме фиг. 2 и их функциональная связь с постоянной времени 1, следует из уравнения вь,) полученного на основании передаточной функции корректирующего звена. Начальное значение амплитуды сигнала при абсолютной настройке корректирующего звена по частоте механического резонанса устанавливается путем первона чальных наладочных настроек коэффициента демпфирования звена относитель но объекта. Амплитудно-частотные (АЧХ) и фазо-частотные (ФЧХ) характеристики, поясняющие работу;устройства, приведены на фиг. 3, гщеприняты следующие обозначения: L .-02 АЧХ части объек та, отражающей его упругие свойства при двух значениях частот механического резонанса , и ш ; LK - АЧХ коррек тирующего звена при частоте w,,,; Ц , . - АЧХ разомкнутого контура регулироваиия при ш,, и UJy ; Ч - ФЧХ корректирующего звена; дч сдвиг по фазе в корректирующем звене на частоте ... На графиках показан случай,когда изменяется частота механического резонанса объекта от tUyi до Wyi з параметры корректирующего звена остаются неизменными и соответствуют частоте Шу(. Большой положительный сдвиг по фаап ДМ будет в этом случае сопровождаться и большим увеличением амплитуды , сигналов в системе на частоте резонанса. Последнее иллюстрируется амплитудно-частотной характеристикой L 2, разомкнутого контура регулирования. Положительный сдвиг по фазе приводит к появлению положительного напряжения на выходь фазового дискриминатора и на входе широтно-импульсного модулятора. Это в свою очередь приводит к изменению скважности работы ключей и к изменению варьируемых параметров корректирутощего звена, Перенастройка корректирующего звена будет соответствовать частоте Шу и вид перенастроенной АЧХ разомкнутого контура регулирования при этой частоте будет примерно соответствовать виду L . Сдвиг по фазе вновь будет равен нулю. Аналогичные процессы произойдут, если частота резонанса уменьшится. Приращения параметров в этом случае будут отрицательны- . ми. Следует отметить, что умейьшение частоты Шу также сопровождается начальным увеличением амплитуды сигналов в системе, как и при увеличении ш у . Это является положительной особенностью, т. к. еще больще повьпиает чувствительность самонастройки к изменению параметров резонанса и делает ее еще более эффективной. Использование кор|ректируюшего звена оснащенного контуром самонастройки параметров по частоте механического резонанса в системах с нестационарными механическими объектами дает возможность в 3-4 раза увеличить быстродействие .систем и тем самым соответственно увеличить динамическую точность систем. При отсутствии самонастройки в корректирующем звене коэффициент отношения частоты упругих колебаний к частоте среза контура, в состав которо- го входит объект со слабо демпфированной упругой механической связью, достигает значений 6 10. При наличии самонастройки корректирующего звена этот коэффициент может быть снижен до значений . В системе обеспечивается с стабильность работы при изменении часготы резонанса в 2-3 раза. Устройство может быть использовано в любых высокоточных электромеханических системах, где Ьсновиыь{1 фактором ограничения быстродействия и динамической точности выступают явления упругих мехйнйческих резонансов, например, в системах наведения рааиотелескоnoBi и астрономических инструментов; в следящих системах металлообрабатывающих станков; в различного рода механйз мах, связанных с перемоткой материала (где в процессе перемотки значительно изменяются моменты инерции), например в лентопротяжных механизмах видеомагнитофонов и в других аналогичных случаях. Формула изобретения Система управления, содержащая последовательно соединенные регулятор, 1 / корректирующее звено и объект управления и последовательно соединенные фазовый дискриминатор и интегратор, отличающаяся тем, что, с целью повышения точности системы она содержит широтно-импульсный модулятор и два полосовых фильтра,, входы которых, соединены соответственно со входом и выходом корректирующего звена, а выходы - со. входами фазового дискриминатора, а вь1ход интегратора соединен со входом широтно-импульсного модулятора, выход которого соединен с управляющим входом корректирующего звена. Источники информации, принятые во внимание при экспертизе 1.Шестаков Б. М., Иншаков Ю. М. Синтез последовательной коррекции в системах подчиненного регулирования электроприводов с упругими механическими передачами. .Известия ВУЗов, сер. Энергетика №3, 1974. 2.Растригин Л. А. Системы экстремального управления, М., Наука, 1974, стр. 73-77 (прототип).
L,8B
tfsK
(f)yZ .5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1241394A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ХАРАКТЕРИСТИК ДИНАМИЧЕСКОЙ СИСТЕМЫ ВТОРОГО ПОРЯДКА | 1972 |
|
SU432458A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| УСТРОЙСТВО для НЕЛИНЕЙНОЙ КОРРЕКЦИИ ПАРАЛТ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯETT4JD | 1971 |
|
SU310233A1 |