Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Цель изобретения - улучшение компенсации упругих колебаний и повышение быстродействия электропривода.
На фиг. 1 изображена функциональная схема электропривода; на фиг. 2-4 - принципиальные схемы соответственно частотно-чувствительного бло ка, корректирующего звена и управляемого полосового фильтра.
Электропривод с упругой связью 1 между электродвигателем 2 и механизмом 3 содержит последовательно включенные регулятор 4 частоты вращения с подключенным к его входу датчиком 5 частоты вращения, корректирукнцее звено 6, регулятор 7 тока якоря с подключенным к его входу датчиком 8 тока и регулируемый преобразователь 9, подключенный к якорю электродвигателя 2 , а также последовательно включенные полосовой фильтр 10, частотно-чувствительный блок 11, выпрямитель 12, первый широтно-импульсный модулятор 13 и последовательно соединенные фазовый дискриминатор 14, интегрозапоминаклций блок 15 и второй широтно-импульсный модулятор 16, причем вход перестраиваемого полосового фильтра 10 подключен к выходу датчика 5 частоты, а его выход вме- сте с входом частотно-чувствительного блока 11 подключен к входам фазового дискриминатора 14, управ- ляюпще входы корректирукядего звена 6 соединены с выходами широтно-импульс ных модуляторов 13 и 16, выход второго из которых подключен к управляющему входу частотно-чувствительного блока 11. Выход первого широтно-йм- пульсного модулятора 13 соединен с дополнительным управляющим входом частотно-чувствительного блока 11, выход второго широтно-импульсного модулятора 16 соединен с входом инерционного звена 17, выход которого подключен к управляющему входу управляемого полосового фильтра 10. Сигналы, снимаемые с выходов широтно импульсных модуляторов 13 и 16 и инерционного звена 17, управляют ключевыми элементами , входящими в состав частотно-чувствительного блока 11, корректирукицего звена 6 и управляемого полосового фильтра 10.
.1+
1
Элект{)опривод работает следующим образом.
Для широкого класса электроприводов с упругой связью между электро- двигателем и механизмом упругие свойства с достаточной точностью могут быть описаны передаточной функцией
Wu , ,T,P
где Ту , постоянная времени и коэффициент демпфирования, определяемые частотой и , амплитудой упругого резо- нанса.
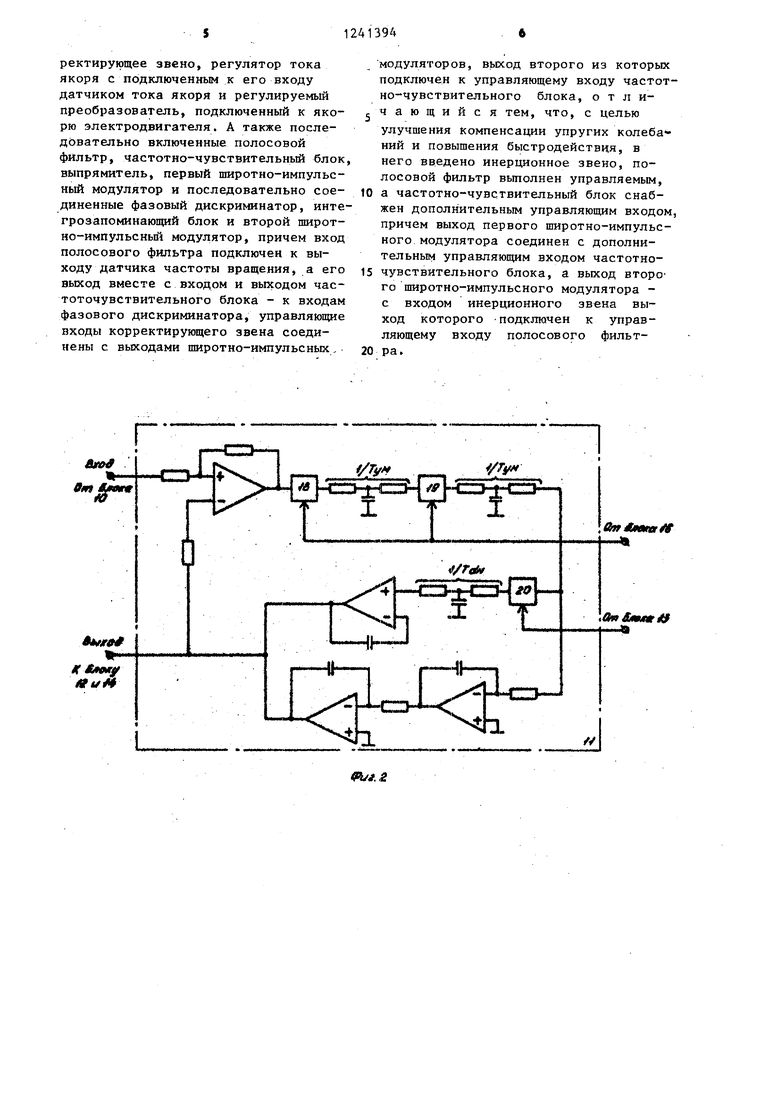
Передаточная функция корректирующего звена (фиг.3) имеет следующий вид
U -Tlslj- 2( + 1
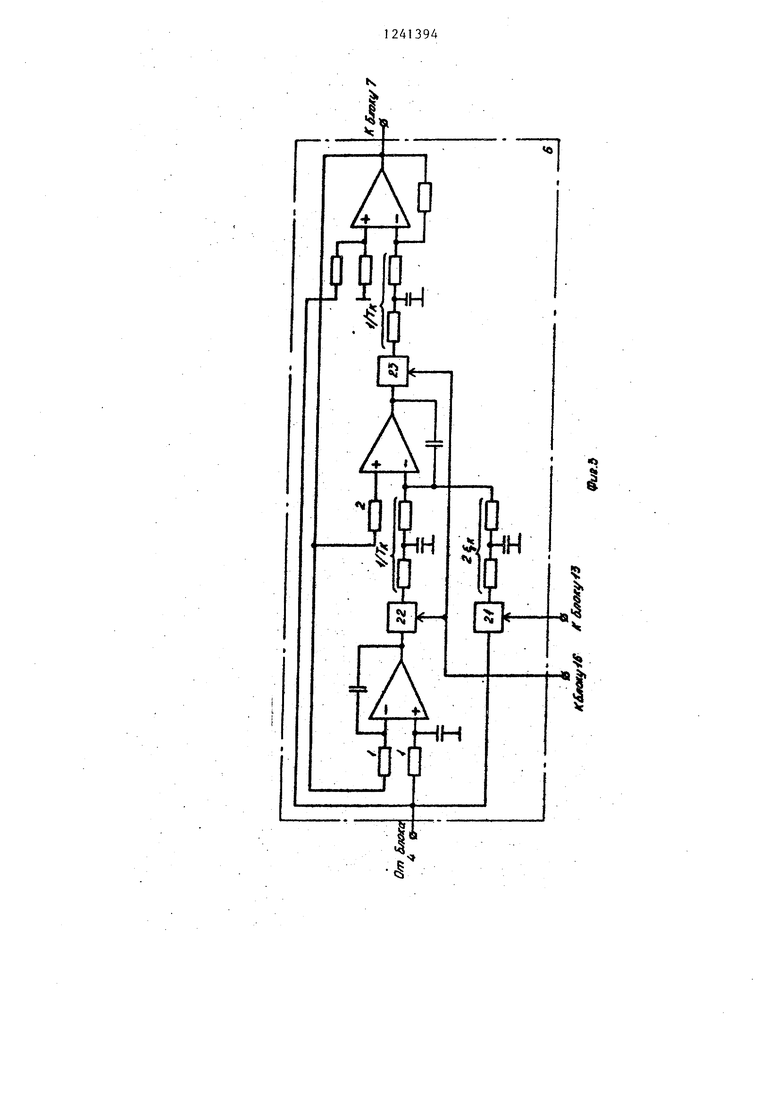
(Р + 1) где Т((, ij, - постоянная времени и коэффициент демпфирования корректирующего звена. При условии I/T 1/Т., и 4 практически полностью компенсируется влияние упругой связи на динамику системы. Выходной сигнал с датчика 5 частоты поступает на вход 5Т1равляемого полосового фильтра 10, имеющего передаточную функцию
W
Кп.
пер
ТЛР +
+ 1
s
д
где
К«ф
Пф
А где 6)
пф Т„ф Р
коэффициент усиления, постоянная времени управляемого полосового фильтра, коэффициент, равный 1/&, параметр затухания, лежащий в пределах О А,11 (фиг.4).
Амплитудная частотная характеристика полосового фильтра имеет резонансный пик щ)и Х 1,414, T.e.5i, 0,707. Условие начальной настрой- ки 1/Тпф 1/Тцо При точной настройке 1/Т|1ф «Оу управляемый полосовой фильтр 10 представляет собой усилитель амплитуды резонансной частоты tiij с коэф Ьициентом усиления
J:Q
0
К4
wr,| («;,)
где
Wn(M)
5
« - амплитудная частотная
функция управляемого полосового фильтра 10 при |Д,ж t/Tj,.
Управляемый полосовой фильтр 10 таким образом выделяет и усиливает частоту упругого резонанса fcJ -1/Tj.
31241
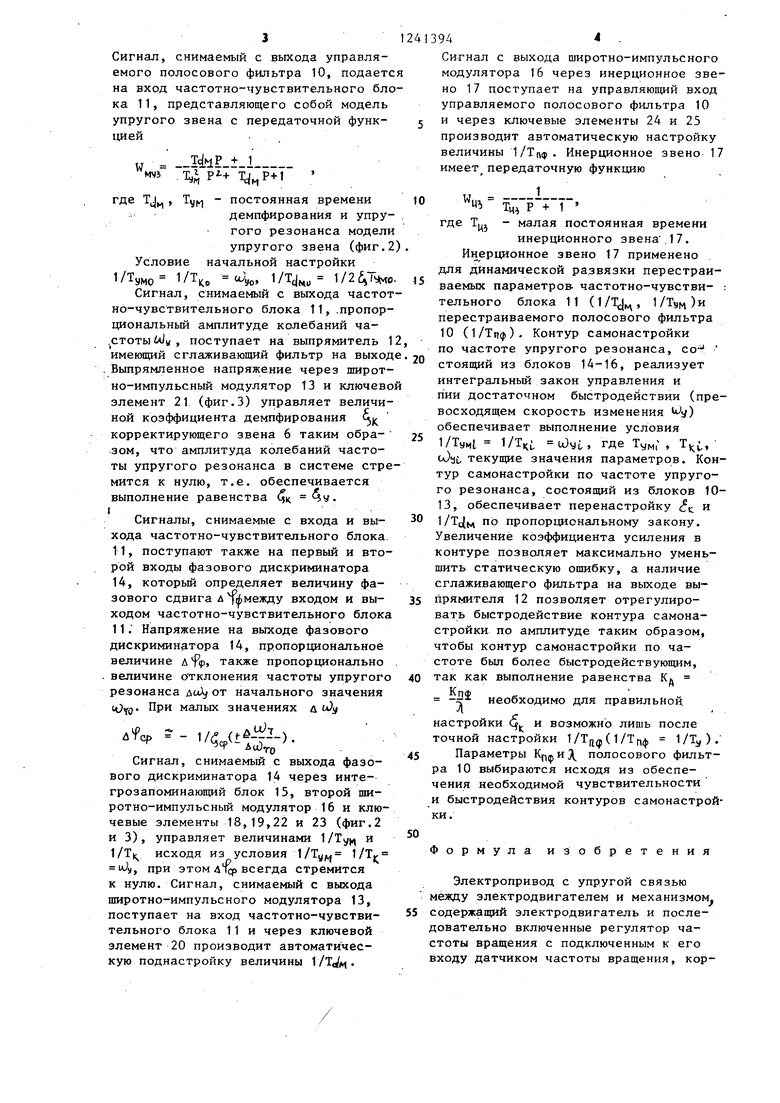
Сигнал, снимаемый с выхода управляемого полосового фильтра 10, подается на вход частотно-чувствительного блока 11, представляющего собой модель упругого звена с передаточной функ- j цией
W
MVJ .-ц, pi+
где Tj , Ty,w - постоянная времению
демпфирования и упру- . гого резонанса модели упругого звена (фиг.2). Условие начальной настройки
1/Тумо I/TKO tfo. I/TCJMU 45
Сигнал, снимаемый с выхода частотно-чувствительного блока 11, .пропорциональный амплитуде колебаний частотыб и, поступает на выпрямитель 12, имеющий сглаживающий фильтр на выходе.2о
Выпрямленное напряжение через широт- но-импульсный модулятор 13 и ключевой элемент 21 (фиг.З) управляет величиной коэффициента демпфирования j корректирующего звена 6 таким обра- 25 зом, что амплитуда колебаний частоты упругого резонанса в системе стремится к нулю, т.е. обеспечивается выполнение равенства (ц .
Сигналы, снимаемые с входа и вы- 30 хода частотно-чувствительного блока. 11, поступают также на первый и второй входы фазового дискриминатора 14, который определяет величину фазового сдвига д фмежду входом и вы- 35 ходом частотно-чувствительного блока 11. Напряжение на выходе фазового дискриминатора 14, пропорциональное величине д Рф, также пропорционально . величине отклонения частоты упругого 40 резонанса Д(Д( от начального значения При малых значениях и t
V - i/C(.
Ч
Сигнал, снимаемый с выхода фазового дискриминатора 14 через инте- грозапоминающий блок 15, второй ши- ротно-импульсный модулятор 16 и ключевые элементы 18,19,22 и 23 (фиг.2 и 3), управляет величинами 1/Ту( и l/Tj; исходя из условия 1/Ту 1/Т| , при этом дтср всегда стремится к нулю. Сигнал, снимаемый с выхода широтно-импульсного модулятора 13, поступает на вход частотно-чувстви- тельного блока 11 и через ключевой элемент 20 производит автоматическую поднастройку величины 1/Т,д.
j
5
о
5
0 5 0
5
3944 .
Сигнал с выхода широтно-импульсного модулятора 16 через инерционное звено 17 поступает на управляющий вход управляемого полосового фильтра 10 и через ключевые элементы 24 и 25 производит автоматическую настройку величины 1/Тц|р. Инерционное звено 17 имеет передаточную функцию
„ 1
Ч Тц Р + 1
где Тц, - малая постоянная времени
инерционного звена, 17. Инерционное звено 17 применено для динамической развязки перестраиваемых параметров- частотно-чувстви- ; тельного блока 11 (1/ Iy,, 1/Тум)и перестраиваемого полосового фильтра 10 (1/Ткф). Контур самонастройки по частоте упругого резонанса, со- стоящий из блоков 14-16, реализует интегральный закон управления и ПИИ достаточном быстродействии (превосходящем скорость изменения ) обеспечивает выполнение условия 1/Тум1 u)yi,, где Тум , Т, сОу текущие значения параметров. Контур самонастройки по частоте упругого резонанса, состоящий из блоков 10- 13, обеспечивает перенастройку с5с и по пропорциональному закону. Увеличение коэффициента усиления в контуре позволяет максимально уменьшить статическую ошибку, а наличие сглаживающего фильтра на выходе выпрямителя 12 позволяет отрегулировать быстродействие контура самонастройки по амплитуде таким образом, чтобы контур самонастройки по частоте был более быстродействующим, так как выполнение равенства Кд
- необходимо для правильной,
настройки 4,, и возможно лишь после точной настройки (|)( 1/Тпф 1/Т.,). Параметры полосового фильтра 10 выбираются исходя из обеспечения необходимой чувствительности и быстродействия контуров самонастройки.
Формула изобретения
Электропривод с упругой связью между электродвигателем и механизмом содержащий электродвигатель и последовательно включенные регулятор частоты вращения с подключенным к его входу датчиком частоты вращения, корректирующее звено, регулятор тока якоря с подключенным к его входу датчиком тока якоря и регулируемый преобразователь, подключенный к якорю электродвигателя. А также последовательно включенные полосовой фильтр, частотно-чувствительный блок выпрямитель, первый широтно-импульс- ный модулятор и последовательно соединенные фазовый дискриминатор, инте грозапоминающий блок и второй широт- но-импульсньй модулятор, причем вход полосового фильтра подключен к выходу датчика частоты вращения, а его выход вместе с входом и выходом час- тоточувствительного блока - к входам фазового дискриминатора, управляющие входы корректирующего звена соединены с выходами широтно-импульсных.
модуляторов, вьгход второго из которых подключен к управляющему входу частотно-чувствительного блока, о т л и,чающийся тем, что, с целью улучшения Компенсации упругих колеба-- НИИ и повышения быстродействия, в него введено инерционное звено, полосовой фильтр вьтолнен управляемым,
10 а частотно-чувствительный блок снабжен дополнительным управляющим входом причем выход первого широтно-импульс- ного модулятора соединен с дополнительным управляющим входом частотно15 чувствительного блока, а выход второ го широтно-импульсного модулятора - с входом инерционного звена выход которого подключен к управляющему входу полосового фильт20 ра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Система управления с упругой механической связью | 1977 |
|
SU717717A1 |
| Устройство коррекции для компенсации упругого резонанса в электромеханических системах | 1981 |
|
SU991365A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| Устройство для стабилизации резонансного состояния контура нулевой последовательности в сети с компенсированной нетралью | 1979 |
|
SU860207A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
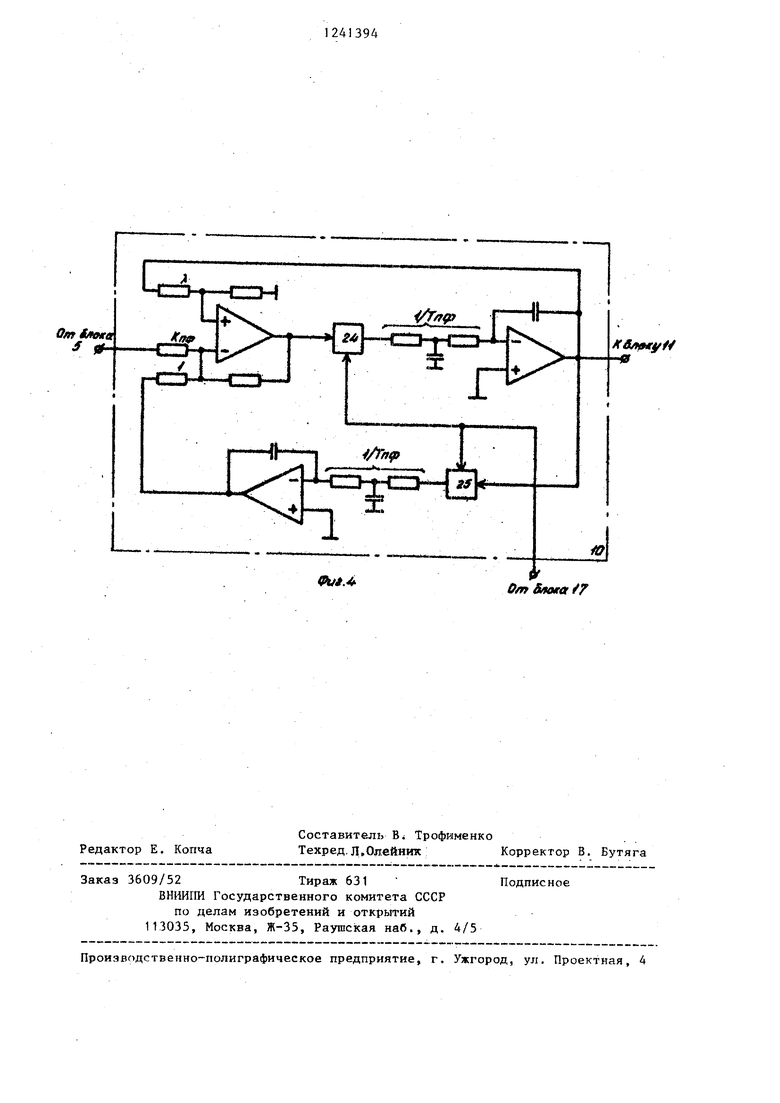
Электропривод с упругой связью между электродвигателем и механизмом является устройством с повышенным i быстродействием и улучшенной компенсацией упругих колебаний. Цель изобретения - улучшение компенсации упругих колебаний. Устройство содержит электродвигатель 2 и механизм 3 с упругой связью 1, регулятор частоты вращения 4 с датчиком частоты вращения 5, корректирующее звено (КЗ) 6, регулятор тока якоря 7 с датчиком тока 8 и регулируемый преобразова-. тель 9. Управляемый полосовой фильтр (УПФ) 10 вьщеляет и усиливает частоту упругого резонанса. Широтно- импульсный модулятор (ШИМ) 13 и ключевой элемент управляют КЗ 6 таким образом, чтобы амплитуда колебаний частоты упругого резонанса в системе стремилась к нулю. Введение инерционного звена 17, выполнение УПФ 10 управляемым и снабжение частотно- чувствительного блока 11 дополнительным управляющим входом, соединенным с выходом ШИМа 13, обеспечивает повышенное быстродействие и улучшенную компенсацию упругих колебаний. Контур самонастройки по частоте упругого резонанса состоит из блоков 14-16 и реализует интегральный закон управления. Контур самонастройки из блоков 10-13 позволяет максимально ; уменьшить статическую ошибку и отрегулировать быстродействие контура по амплитуде. 4 ил. i (Л N9 42 СО СО сриг./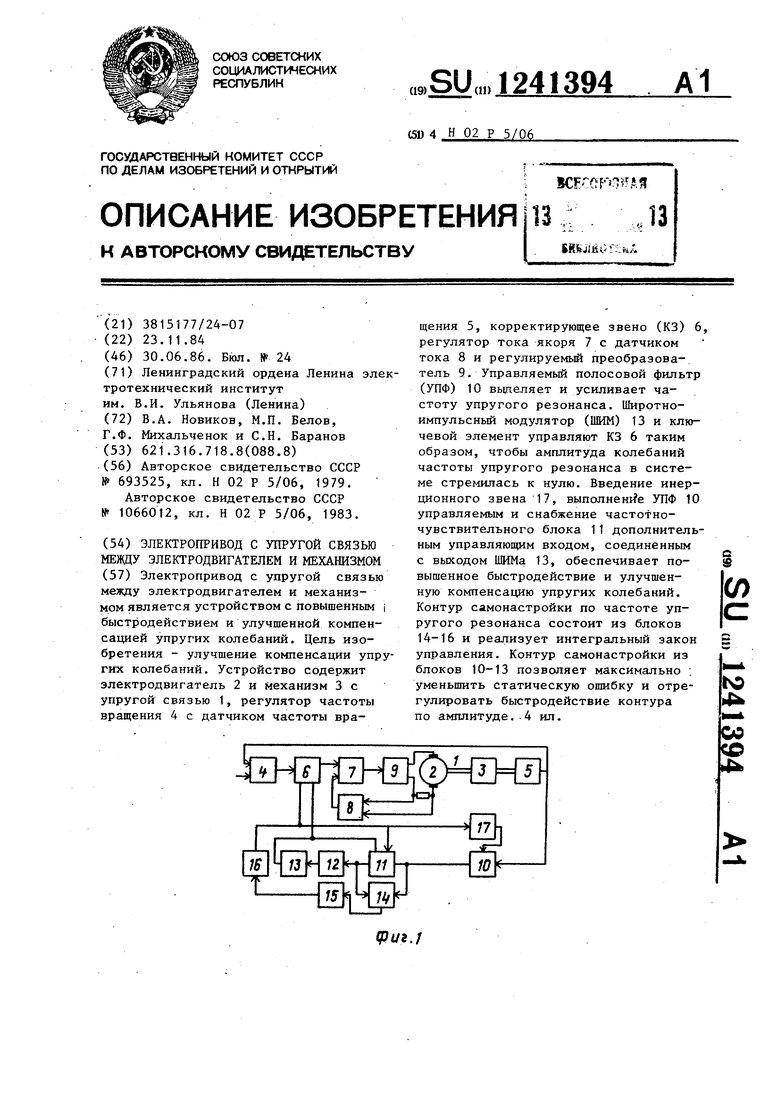
Г
AnhiP
KSAfHtyf
«г
Saaxaif
Редактор Е. Копча
Составитель Bi Трофименко
Техред,Л,Олейник Корректор В. Бутяга
Заказ 3609/52Тираж 631 Подписное
ВНИИГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ демпфирования колебаний в элетроприводе и устройство для его осуществления | 1977 |
|
SU693525A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
