В существующих при; 0Дах системы много управления IKJложепием длительность програм-много сигнала оп)еделяет величину перемещения. При заданном иеремешенин, превыщак))ием единичный шаг в несколько )аз, электромагнит должен сработать сто.тько jias. во сколько раз .заданное перемещение превыщает единичны щаг.
В оиисываемом .приводе системы ирограм.много уирар-ленип положением для кинематического присоединения вы.ходного вала к непрерывно вращающемуся валу применена одно- или иолуоборотнал муцЬта. Такое устройство обеспечивает плавное перемещение исполнительны.х органов и уменьщение числа переключений электромагнита.
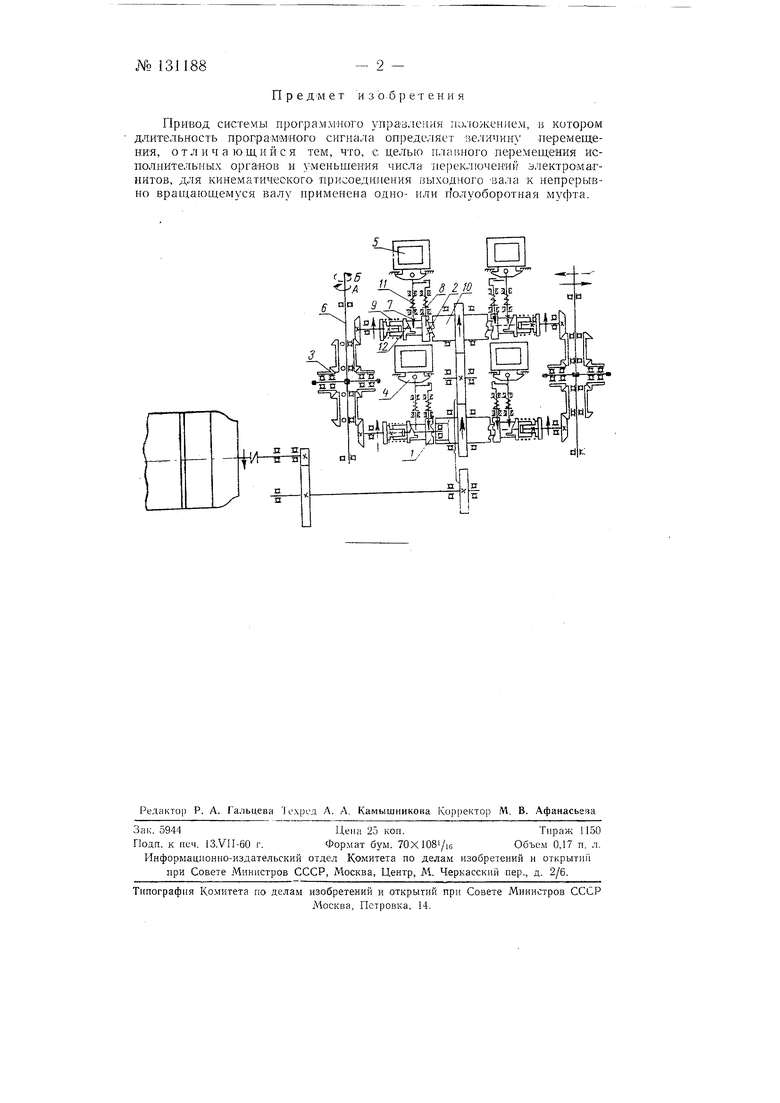
На чертеже изображена кинематическая схема описываемого привод;:.
В онисываемо.м приводе перемещения и ревс))с по одной координате осуществ.тяются механизмом, ссстояи им из двух niaroubrx no.iyоборотиых .муфт 1 и 2, соединенных дифференциалом 3 и управляемых двумя э;гектромагнитами 4 и 5.
Для перемещения по другой коор.динате с.чужит второй , с(к-тоящий из таких же элементов.
При необходимости вращения вала 6 в направ.чении, yкaзaннo f сплоитиой стрелкой А, на э.тектромагнит 5 подается импульс электрического тока. Палец 7 и фиксатор 8 поднимаются. Полуоборотная муфта 2 под, действием .пружины ..9 сцепляется с непрерывно вращающейся по.тумуфтой 10. Когда импульс тока, питающего э.чектромагиит 5, прекратится, палец 7 под действием пружины 11 опустится вниз. Па него набежит наклонный выступ 12 по.пуоборотной муфты 2. Наклонных Выступов 12 в этой муфте имеется два. Едипичный 1иаг полуоборотной муфты 2-180°. Число щагов, которое соверщит полуоборотная муфта 2, кратно продолжительности импульса элсктрическо10 тока, иоданного в обмотку электромагнита 5.
При необходимости вращения выходного вала 6 в направ.чении, указанном пунктирной стрелкой Б (в обратную сторону), пмпу.тьс тока подается в обмотку электромагнита 4. Электромагнит 4 включает полуоборотную муфту /. Реверс осунаествляется автоматически .пфП р е дМ е т и з о б р е т е н и я
Привод системы програмлгното .iennH гкхчожением, в котором длительность программио-го сиг}1ала определяет зе.тичину иеремещениЯ, отличающийся тем, что, с целью пл; вного леремеидеяия исиолыительмых органов и уменьшения числа ие|)еключеннй электролчагнитов, для кинематичеокого присоединения выходного ва.аа к непрерывно вращающемуся валу применена одно- или полуоборотная муфта.