В существующих приводах системы программного управления положением длительность программного сигнала определяет величину перемещения. При заданном перемещении, превыщающем единичный щаг в несколько раз, электромагнит должен сработать столько раз, во сколько раз заданное перемещение превыщает единичный щаг.
В предлагаемом приводе системы программного управления положением для кинематического присоединения выходного вала к непрерывно вращающемуся валу применена одно- или полуоборотная муфта. Такое устройство привода обеспечивает плавное перемещение исполнительных органов и уменьщение числа переключений электромагнитов.
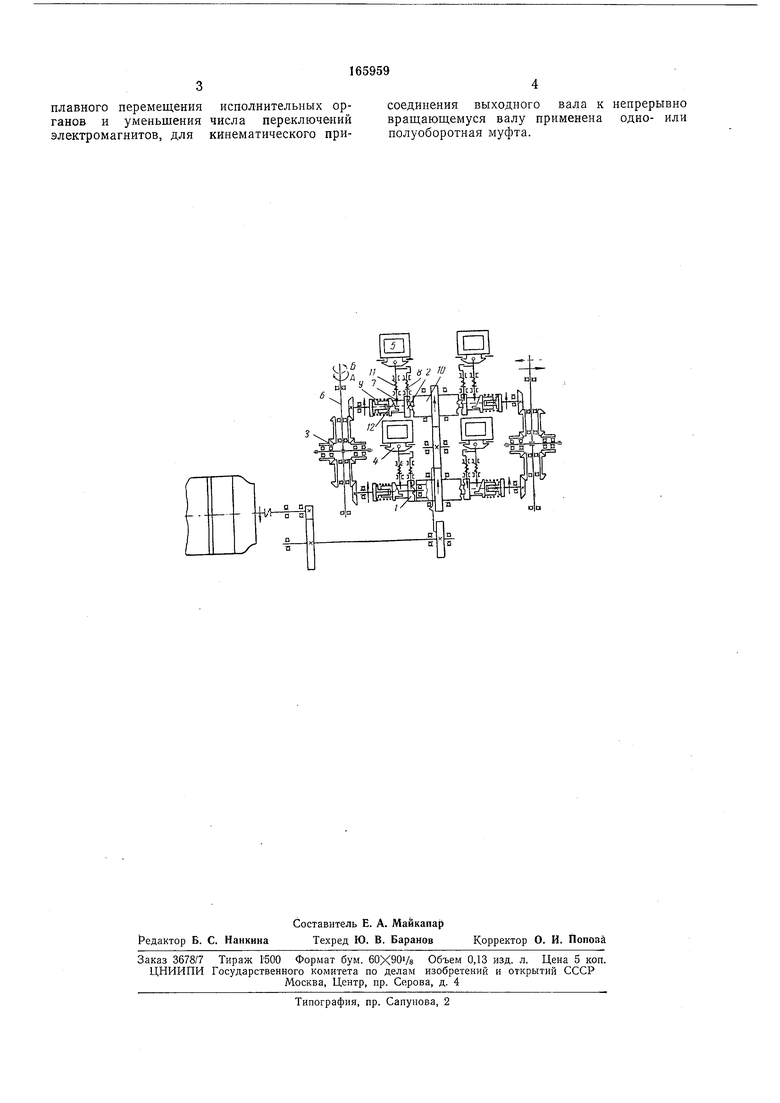
На чертеже изображена кииематическая схема описываемого привода.
В описываемом приводе перемещения и реверс по одной координате осуществляются механизмом, состоящим из двух щаговых полуоборотных муфт 1 н 2, соединенных дифференциалом 3 и управляемых двумя электромагнитами 4 и 5.
Для перемещения по другой координате служит второй механизм, состоящий из таких же элементов.
стрелкой А, на электромагнит 5 подается импульс электрического тока. Палец 7 и фиксатор 8 поднимаются. Полуоборотная муфта 2 под действием пружины 9 сцепляется с непрерывно вращающейся полумуфтой 10. Когда импульс тока, питающего электромагнит 5, прекращается, палец 7 под действием пружины 11 опускается вниз. На него набегает наклонный выступ 12 полуоборотной муфты 2
(наклонных выступов в этой муфте имеется два). Единичный щаг полуоборотной муфты 2-180°. Число щагов, которое соверщает полуоборотная муфта 2, кратно продолжительности импульса электрического тока, поданного в обмотку электромагнита 5.
При необходимости вращения выходного вала 6 в направлении, указанном п нктирной стрелкой Б (в обратную сторону), импульс тока подается в обмотку электромагнита 4. Электромагнит 4 включает полуоборотную муфту /. Реверс осуществляется автоматически дифференциалом 3.
Предмет изобретения
25
Привод системы программного управления положением, в котором длительность про. граммного сигнала определяет величину пезо ремещения, отличающийся тем, что, с целью
плавного перемещения исполнительных органов и уменьшения числа переключений электромагнитов, для кинематического присоединения выходного вала к непрерывно вращающемуся валу применена одно- или полуоборотная муфта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод системы программного управления положением | 1959 |
|
SU131188A1 |
| ПРИВОД СИСТЕМЫ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1965 |
|
SU167425A1 |
| АВТОМАТ ДЛЯ УКЛАДКИ ПРОВОДОВ В ЖГУТЫ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1967 |
|
SU190450A1 |
| Устройство для автоматического программного управления | 1942 |
|
SU68500A1 |
| Устройство для выполнения рисунков | 1981 |
|
SU1134407A1 |
| Устройство для непрерывной бифилярной намотки кинопленки | 1984 |
|
SU1282053A1 |
| ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕШЕНИЙ СТАНКА С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1972 |
|
SU346036A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| ПРИВОДНОЕ УСТРОЙСТВО | 1973 |
|
SU375635A1 |
| ГРУЗОВОЙ АВТОМОБИЛЬ СО ВСЕМИ ВЕДУЩИМИ КОЛЕСАМИ | 2011 |
|
RU2483945C1 |