Известные автоматические горизонтальные, бесшаботиые молоты с электронной системой автоматического регулирования имеют сложную конструкцию, неудобны в эксплуатации, трудоемки в изготовлении, дороги и не обеспечивают требующейся надежности и точности в работе.
Предлагаемый автоматический горизонтальный бесшаботный молот, не имеет сложной электронной системы регулирования, обладает более простой конструкцией, а также большей надежностью и точностью в работе.
В отличие от известных бесшаботных молотов, в описываемом молоте система автоматического регулирования синхронизатора выполнена с механическими датчиками, контролирующими рассогласование в движении бойков молота. Датчики воздействуют посредством гидравлического привода на механизмы, корректирующие положение органов воздухораспределения относительно их связи с приводом управления. Молот снабжен отдельной системой, предохраняющей его от ударов одним бойком.
Система воздухораспределения выполнена в виде золотников огдельных для каждого из бойков, управляющих обеими полостями цилиндров бойков. Золотники приводятся в действие от общего пневматического сервопривода и рычажных систем с «сабельными рычагами, взаимодействующими с бойками.
Механические датчики, контролирующие рассогласование перемещения бойков (асимметрично плоскости соударения), выполнены в виде рычагов, несущих ролики с лысками.
Ролики взаимодействуют со скощенными по концам планками, прикрепленными к бойкам и снабженными пружинами, поворачивающими ролики при сходе роликов с поверхности планок в случае рассогласования.
№ 131199- 2 Механизмы, корректирующие воздухораспределение при рассогласовании перемещения бойков, выполнены в виде винтовой передачи, изменяющей положение одного из золотников, относительно рычажной системы, соединяющей оба золотника с сервоприводом. Винтовая передача приводится в действие приводами, например, гидравлическими с храповыми механизмами, управляемыми от датчиков рассогласования, каждый из которых приводит винтовую передачу во вращение в сторону, соответствующую исправлению обнаруженного датчиком рассогласования.
Предохранительная система от односторонних ударов (ударов одним только бойком) выполнена в виде двух гидравлически связанных между собой золотников, уравновещенных пружинами, выводимых из равновесного положения поступлением .рабочего агента в рабочую полость цилиндра только одного из бойков, за счет установки золотников в камерах, соединенных с рабочими полостями цилиндров. Соединительные ходы золотников выполнены так, что смещение золотников вызывает охолащивание того цилиндра, в который подано давление.
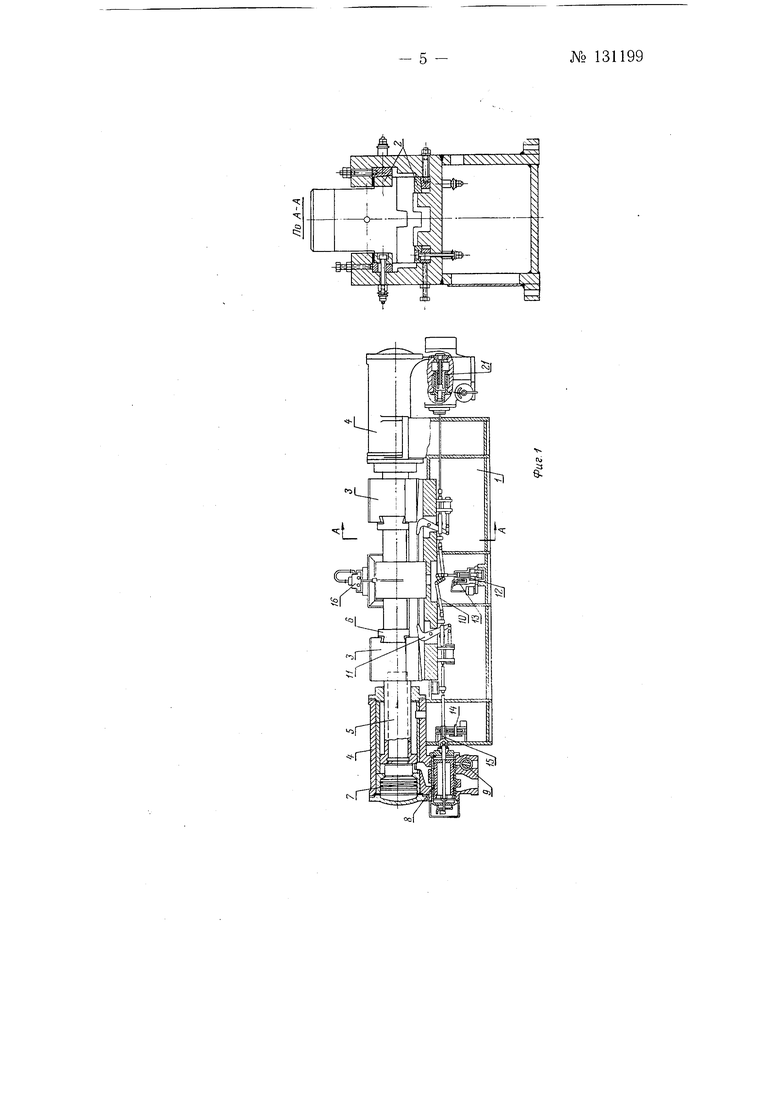
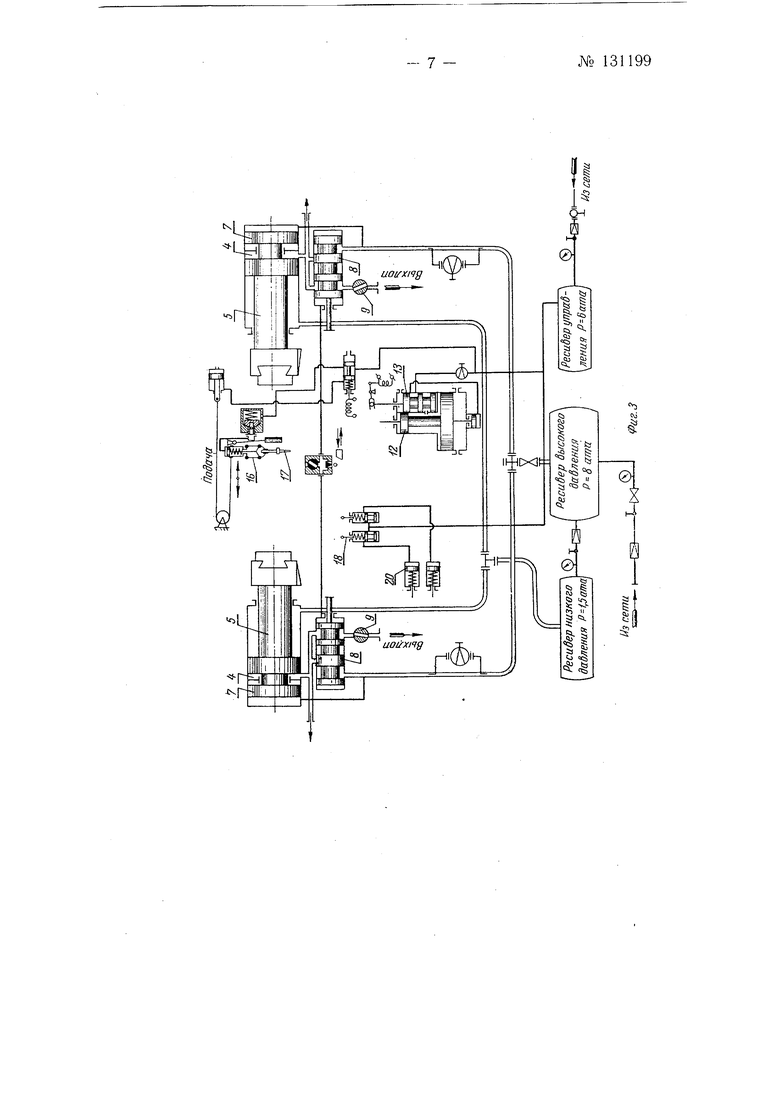
На фиг. I схематически изображен молот в разрезе; на фиг. 2 показана его принципиальная схема; на фиг. 3 - пневматическая схемп; на фиг. 4 - приведена схема работы .датчика рассогласования; на фиг. 5 - схема предохранительной системы от удара одним бойком.
Молот содержит станину 1 (фиг. 1, 2) с регули.руемыми направляющими 2 для правильного движения бойков 3. На станине размещены два рабочих цилиндра 4, в которых под действием сжатого воздуха перемещаются навстречу друг другу поршни 5 бойков 3. К бойкам с помощью клиньев крепится рабочий инструмент 6 (щтампы). Буфер 7 обеспечивает строго определенное исходное положение бойков.
Управление впуском и выпуском сжатого воздуха в задние полости .рабочих цилиндров осуществляется двумя золотниками 8-; передние полости цилиндров соединены с ресивером низкого давления. Каждый золотник соединен с выхлопным дросселем 9, обеспечивающим торможение бойка при обратном ходе. Настройка дросселя осуществляется в зависимости от скорости отскока бойков и давления в передней полости цилиндра.
Механизм управления 10 состоит из системы рычагов, обеспечивающей строго одновременное включение золотников от сервопривода, отсечку воздуха и предварение выхлопа при рабочем ходе, осущес вляемое автоматически с помощью «сабельных рычагов 11.
Сервопривод пуска осуществляет электропневматическое управление .молотом, обеспечивая моментальное действие золотников. Состоит сервопривод из пневматического цилиндра 72 с демпфером, устрапяющим удары в конце хода включения, и золотника 13, заправляемого с помощью электромагнита.
Механизм автоматической настройки золотников 14 при рассогласовании движения бойков автоматически смещает регулируемый золотник 8 на некоторое расстояние. Это приводит к запаздыванию (или опережению) включения регулируемого золотника, вследствие чего замедляется (или ускоряется) движение опережающего (или отстающего) бойка. В механизме имеются: специальная винтовая гайка 15, щарнирно связанная с золотником и резьбовым соединением с рычажной системой, а также система щестерен и пневмоцилиндров, осуществляющих передачу и усиление импульса рассогласования на гайку 15.
Датчик рассогласования подает команду на механизм автоматической настройки золотника в случае запаздывания (или опережения) одного из бойков.
Подача заготовок в рабочее пространство между штампами, удержание заготовки в процессе штамповки и удаление отштампованной заготовки и рабочего пространства производится с помощью механизма подачи 16.
Работа молота происходит следующим образом.
Заготовка 17, нагретая до ковочной температуры, подается оператором к клещевому зажиму механизма подачи 16 и, зажатая в нем, устанавливается в одной плоскости с ручьями штампов. В этот момент каретка зажимного устройства нажимает на конечный переключатель, включает электромагнит сервопривода, который переключает золотники 13 и впускает сжатый воздух в цилиндр 12 сервопривода. Порщень сервопривода через систему рычагов перемещает золотники 8, которые открывают доступ сжатого воздуха высокого давления в задние полости рабочих цилиндров 4. Происходит одновременный удар рабочих инструментов 6 по заготовке и ее деформация.
Во время движения каждый боек своим скосом поворачивает саблеобразный рычаг //, который другим своим концом при помощи ролика толкает золотники 8, устанавливая их в исходное положение. При движении золотников назад происходит перекрытие впускных окон (отсечка воздуха) и открытие выхлопных окон (предварение выпуска), необходимое для устранения повторного удара.
При обратном ходе бойка 3 с инструментом 6 воздух выходит из задней полости цилиндров 4 через выхлопной дроссель Я создавая воздушный буфер при отскоке бойка. Вследствие наличия постоянного низкого давления в передних полостях цилиндров, после выпуска из задних полостей цилиндров сжатого воздуха высокого давления, бойки 3 займут крайнее заднее исходное положение. Каретка подачи заготовки нажмет на конечный выключатель и заготовка упадет в тару. В дальнейшем цикл повторится.
Возможность рассогласования движения бойков 3 в описываемом люлоте устраняется автоматическим регулирующим устройством, состоящим из механизма автоматической настройки золотников и механических датчиков рассогласования.
Механические датчики рассогласования (фиг. 4) выполнены в виде рычагов 18, несущих ролики, 19 с лысками. Ролики скользят лысками по скощенным поверхностям планок, прикрепленных к бойкам. Если плоскость соударения сместится, например, вправо, то левый ролик соскочит с выступа планки и под действием пружины повернется так, как показано на фиг. 4, а. При обратном ходе бойка выступ планки наскочит на круглую часть ролика (фиг. 4, б) и произведет включение золотника, соединенного с одним из силовых цилиндров 20 механизма автоматической настройки золотников 14. Поршень цилиндра 20, перемещаясь, повернет винтовую гайку 15, которая передвинет золотник таким образом, что при следующем включении произойдет запаздывание открытия окон золотника, чем и будет ликвидировано его опережение. При подходе бойков к крайнему заднему положению оба ролика /9 соскочат с выступов планки (фиг. 4, в) и датчики будут готовы к контролю следующего удара бойков 3.
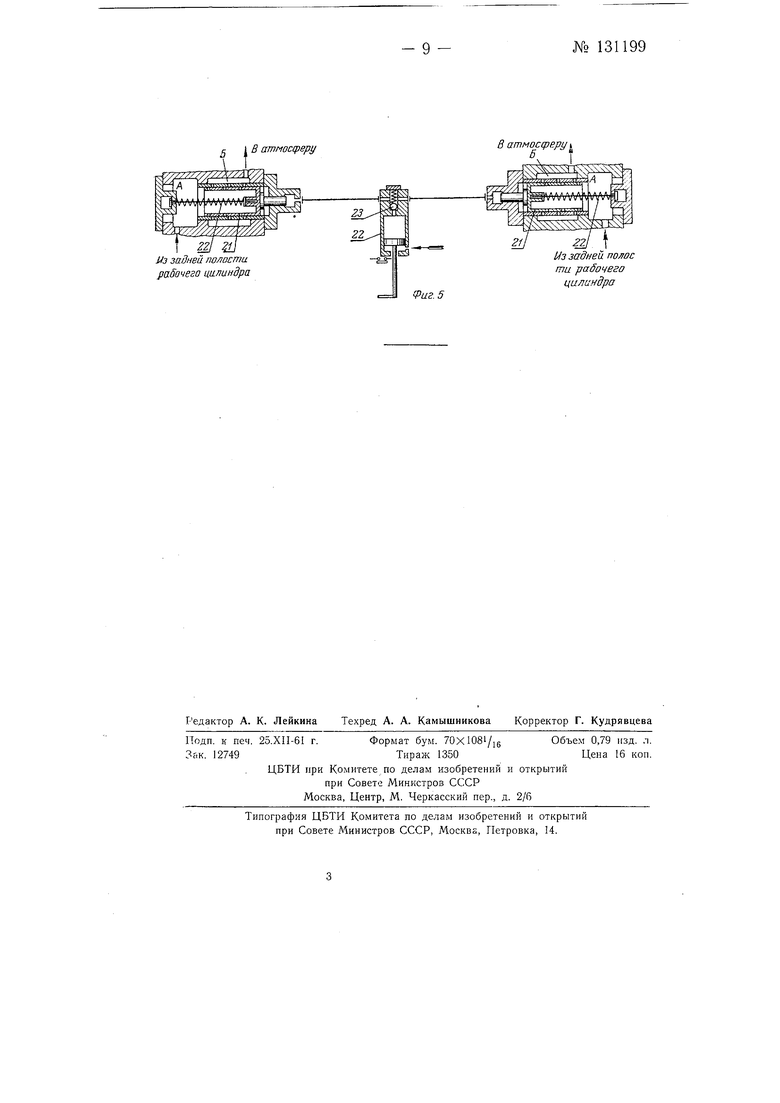
Предохранительная система от односторонних ударов (ударов одного только бойка) выполнена в виде двух золотников 21 (фиг. 5), расположенных в правой и левой золотниковых коробках, уравновещенных пружинами 22 и гидравлически связанных между собой через сообщающиеся полости, вследствие чего в обеих полостях А устанавливается равное давление. Если сжатый воздух поступает, например, только в левый рабочий цилиндр, то вследствие перепада давления в полостях А золотники 21 переместятся вправо и полость А соединится с полостью 5, которая, в свою очередь, сообщена с атмосферой. При
- 3 -№ 131199
№ 131199- 4 этом давление в задней полости левого рабочего цилиндра резко снизится и удар предотвратится.
Для пополнения утечки жидкости предусмотрен гидропневматический аккумулятор 22 с обратным клапаном 23, открывающимся при падении давления жидкости в гидравлической системе золотников.
Предмет изобретения
1.Автоматический горизонтальный бесшаботный молот с системой автоматического регулирования синхронности движения обоих бойков путем перенастройки системы воздухораспределения, отличающийся тем, что, с целью более надежного и нростого устройства, обеспечивающего точную работу молота, система автоматического регулирования синхронизатора выполнена с механическими датчиками, контролирующими рассогласование в движении бойков молога, воздействующими посредством гидравлического привода на механизмы, корректирующие положение органов воздухораспределения относительно их связи с приводом управления, причем молот снабжен отдельной системой, предохраняющей его от ударов одним бойком.
2.Форма выполнения молота по п. 1, отличающаяся тем, что система воздухораспределения выполнена в виде золотников, отдельных для каждого из бойков, управляющих обеими полостями цилиндров бойков и приводимых в действие от общего пневматического сервопривода и рычажных систем с «сабельными рычагами,- взаимодействующими с бойками.
3.Форма выполнения молота по пп. 1 и 2, отличающаяся тем, что механические датчики, контролирующие рассогласование перемещения бойков (асимметрично плоскости соударения), выполнены в виде рычагов, несущих ролики с лысками, взаимодействующие со скошенными по концам планками, прикрепленными к бойкам, и снабженные пружинами, поворачивающими ролики при сходе роликов с поверхности планок в случае рассогласования.
4.Форма выполнения молота по нп. 1-3, отличающаяся тем, что механизмы, корректирующие воздухораспределение при рассогл.асовании перемещения бойков, выполнены в виде винтовой передачи, изменяющей положение одного из золотников относительно рыча кной системы, соединяющей оба золотника с сервоприводом, причем винтовая передача приводится в действие приводами, нанример, гидравлическими с храповыми механизмами, унравляемыми от датчиков рассогласования, каждый из которых приводит винтовую нередачу во вращение в сторону, соответствующую исправлению обнаруженного датчиком рассогласования.
5.Форма выполнения молота по пп. 1-4, отличающаяся тем, что предохранительная система от односторонних ударов (ударов одним только бойком) выполнена в виде двух гидравлически связанных между собой золотников, уравновешенных пружинами, выводимых из равновесного положения поступлением рабочего агента в рабочую полость цилиндра только одного из бойков, за счет установки золотников в камерах, соединенных с рабочими полостями цилиндров, причем соединительные ходы золотников выполнены так, что смещение золотников вызывает охолащивание того цилиндра, в который подано давление.
Us сети
Ш
//3 сети

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предохранения кривошипного пресса от перегрузки | 1960 |
|
SU147918A1 |
| Бесшаботный молот | 1983 |
|
SU1076174A1 |
| Устройство программного управления паровоздушными молотами | 1960 |
|
SU133737A1 |
| Гвоздезабивной аппарат | 1949 |
|
SU85842A1 |
| Система воздухораспределения паровоздушного молота | 1987 |
|
SU1609547A1 |
| Гидравлическое устройство для испытания прессов | 1960 |
|
SU139113A1 |
| ВЫТАЛКИВАЮЩЕЕ УСТРОЙСТВО К БЕСШАБОТНОМУМОЛОТУ | 1971 |
|
SU319373A1 |
| МЕХАНИЗМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМ КОВОЧНЫМ МОЛОТОМ | 1969 |
|
SU244846A1 |
| ПРИВОД СКОРОСТНОГО БЕСШАБОТНОГО МОЛОТА | 1966 |
|
SU185669A1 |
| Система управления паровоздушным молотом | 1974 |
|
SU512846A1 |


.
-щ с 1 в атпмоссреру задней полости, рабочего цилиндра rriMocipepy Б 221 из задней полос гпи рабочего цилиндра
