(54) СИСТЕМА УПРАВЛЕНИЯ ПАРОВОЗДГУ НЫМ МОЛОТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод штамповочного молота | 1972 |
|
SU401094A1 |
| Бесшаботный паровоздушный молот | 1951 |
|
SU94482A2 |
| Устройство управления штамповочным молотом (его варианты) | 1979 |
|
SU1120920A3 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| Паровоздушный молот | 1976 |
|
SU808190A1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| Пневмогидравлический молот | 1971 |
|
SU424648A1 |
| ПАРОВОЗДУШНЫЙ КОВОЧНЫЙ молот | 1968 |
|
SU206981A1 |
| ГИДРОПРИВОД МОЛОТА | 1971 |
|
SU305950A1 |
| Вертикальный бесшаботный молот | 1981 |
|
SU984606A1 |
. Изобретение относится к области обработки металлов давлением и предназначено ;для использования в конструк шях кузнечно прессовьтх машин ударного действия.
Известна система .п.равлекия паровоздушным молотом,-, содержащая установленнь й Б магистрали, связывающей источник сжатого воздуха с рабочим цилиндром молота, распред;литепьный золотш к и сервопривод, а такл-:е ;смонтироваивый на станине двуплечий ры,чаг, один конех которого кинематически связан с бабой молота, а другой коиец посредством рычагов и тяг связан с плунжером распределительного золотника и сервоприводом.
Недостатками известной системы управ- Ления ЯВЛЯ10ТСЙ низкие производительность, К. п, д. и невь сокая надежность работы,, С целью устранения указанных недостаткоЕ предложенная система снабжена закреплен:ными на .станв.нб ч 1а5Кй атк.ческой цепи связанными пocpeдcтБo ; двуплечего рычага с бабой, реле давлеиик и пнивмонилиндром, поршневан полость которого связана с рабочей полость-о оело к.:;;2;;енкя„ улравляегло-
;гс от сервопривода, а также золотником таравлен::я электрически связанным с входом рйле давления и установленной в корпу э распределительного золотника, ко1шентрично его к плунжеру, подвижной втулкой с окнами, жестко соединенной с поршнем пн-л-моцилиндра управления, смонтироБанно- ;го на станине над распределительным золотником, при этом над и подпоршневые полос|ти пневмоцилиндра управления соединены I через золотник управления с пневмосетью ;/правлев(я, а корпус пневмоцилиндра управ,ления Юшематически связан с управляющим механизмом сервопривода.
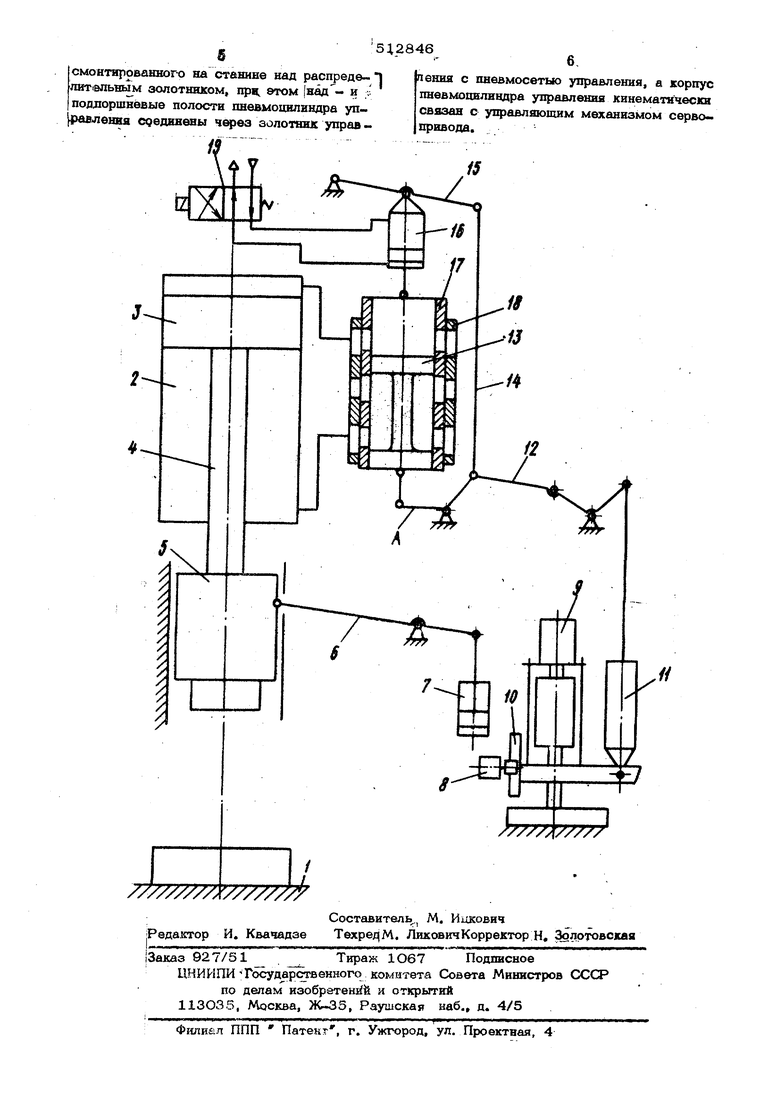
Предложенная система управления пред:ставлена на чертеже.
На стан1 ке 1 молота смонтирован рабо- 1ИЙ 2 с перемешающимся в нем поршнем 3, .ча штоке 4 которого укреплена
0 ба&а -L , Баба 5 связана двуплечим рычагом 6 со штоком пневмоциликяра 7, рабочая полость которого связана с реле давлчэния 8 jTTp.aE.a.qeNibFM суммирующим пневмозлек - рь.чесхя ; кеханизмом серьопрньоди G с ПОМО1ДЫО реечного задеялекня Ю. Уг4;и15 ление работой молота юсуществляатся испол щтелышм аилвндром 11, неподанжносмонтврованыЫм на суммирующем пнбаыоэлектрвческом механизме сераопривода 9 и связанного системой рычагов 12, включающей овуплечий рычаг А качания золотника 13, Исполнительный цилиндр 11 связан так же через систему рычагов 12, тягу 14, рычаг 15 и хшлиндр управления 16 с подвижной втулкой 17, перемешенной в золот tmKOBoS коробке 18 распределительного золо никеГ1 8. управления 16 управлявтся сигналами, поступающими с реле давления 8 с помощью золотника управления 19. ; Молот работает следующим образом. ; : Исходное положение - баба молота находится на бойке, рабочее тело - сжатый воздух поступает в поршневую полость цилиндра управления 16 через золотник управления 19. Штоковая полость цилиндра управления 16 через-золотник управления 19 соедийена с атмосферой. Режим работы молота задвется на пульте дистанционного управления в завцсимоста от вида обработки поковки (нанесение сильных, средних, сла бых ударов или же .Шлщ- гдвка и забивка углов). этом .суммирующийг пневмоэлект : ричесляй механизм сервопривода 9 зани мает положение, соответствующее задан, ному режиму работы мопота, и благодаря реечному зацеплению Ю, автоматически устанавливается требуемое давление срабатывания реле 8 давления, сигналы с которого управляют работой цилиндра управления 16 с помощью золотника 19 управления. Сжатый воздух, поступая поперГёменно в штоковую или поршневую полости исполнительного цилиндра 11, приводит в воз .ратное-поступательное движение золотник управления молотом 13 и подвижную втул :Ку It, движуши я навстречу друг другу что обеспечивает ускоренное открытие .окон золотниковой коробки 18 (скорость открытия окон при этом может быть боль ше в несколько раз, чем у молотка обычной конструкции). Такое выполнение управления молотом позволяет значительна улучшить выходные параметры его, повысить,надежность и долговечность, расширить технологические возможности, уйели чит к, п. д. всей молотовой усуановки. При определенном изменении парамет™ ров энергоносителя, а также параметров рабочего цилиндра 2 и цилиндра 11 и 5уммируюшего пневмоэлектрического механизма сервопривода 9, баба 5 начинает уходить вверх, не производя удара по по-П овке (например в случае работы в режие легких ударов, шлихтовке или забивки глов), поршень | абочего цилиндра 2 Еачи нает ить в крышку (при работе в режиме сильных ударов). Но как только баба ; Умолота S начнет уходить вверх, степень сжатия воздуха под поршнем рывок - цв линдра 7 увеличивается, давление под |Ним также начнет увеличиваться, н при превышении давления срабатывания реле {Давления 8 срабатывает, подается сигнал |на переключение управляющего золотника |19 и, следовательно, на подачу энергоно сителя и штоковую полость Ш1лнщ;ра 16 управления, шток которого связан с под вижной втулкой 17. Лоршневая полость цилив ра управления 16 соединяется с атмосферой., Втулка 17 начнет эмещаться вниз и прикроет окно впуску воздуха B штоковую полость рабочего цилиндра 2. Баба 3 начинает движение вниз вслед :ствие превышения давления в исходное положение, зо лЬтниК управления 19 п еключается в исходное положение, рабочее ; тело (воздух) из штоковой полости цилиндра управления 16 начнет стравливаться в атмосферу, а в поршневую полость поступать под рабочим давлением, сист&кш управления возвратится в исходное положение. Формула изобретения Система упранлвния паровоздушным мо лотом, содержащая установленный в магистрали, связьюающей источник сжатого воздуха с рабочим дилинд} з молота, раопределительный.лотник э сервопривод, а также сйонтированный на станине молота двуплечий рычаг, один конец которого .кинематически связан с бабой молота, а другой конец - посредством рычагов и тяг связан с плунжером распределительного золотника и сервоприводом, о т л и ч а ю ш а я с я тем, что, с целью повышения производительности, К. П. Д. и надежности, долговечности и устойчивости в работе, она снабжена закрепленными на станине и кинеi матически связанными посредством двуплечего рычага с бабой молота реле давления и пнеь- МОЦИЛИНДрОМ, поршневая пол ость которого CBStзана с рабочей полостью реле давления, управляемого от сервопривода, а также золотником управления, электрически связанным с выходом реле давления, и установленной в корпусе распределительного золотника, Концентрично его пл -нжеру, подвижной с окнами, жестко соединенной со I штоком поршня иневмоцилиндра управления,
