Изобретение относится к области механизации ги автоматизации управления ковочными .паровоздушными молотами, занятыми на биллетировке и протяжке штанг, валов и т. п. в кузнечных цехах крупных заводов.
Известно устройство дистанционного управления паровоздушным ковочным молотом, выполненное Б виде пневматического серволривода, соединенного системой тяг и рычагов с рукояткой « с золотником молота через камень кулисного механизма, и снабженное многоскоростным приводом, число оборотов которого изменяется реостатом.
Предложенное устройство отличается от известного тем, что в сервопривод встроен гидравлический цилиндр, шток -поршня которого шарнирно соединен с рычагом, связанным одним концом с камнем кулисного механизма, а другим жестко - с кулачковым валом командоаппарата изменения числа оборотов многоскоростного привода. Последний снабжен муфтой включения, вьшолненной с механизмом останова ее в требуемом положении.
Это сокращает время технологического цикла и повышает к. п. д. молота.
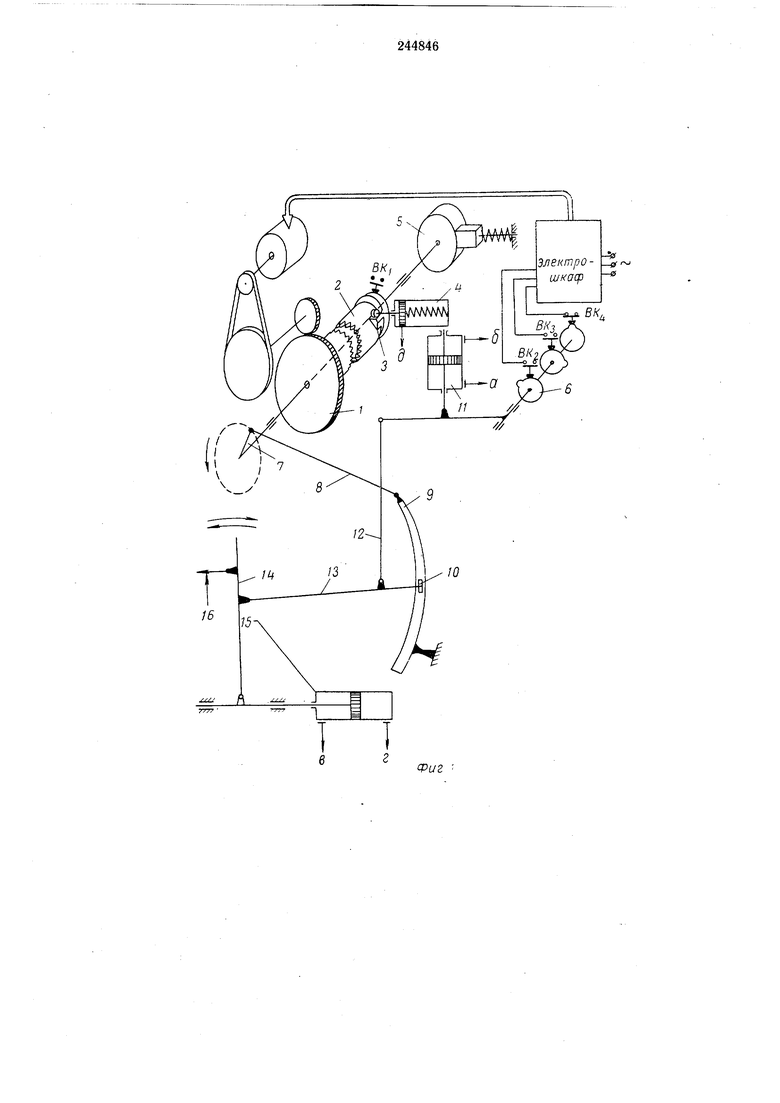
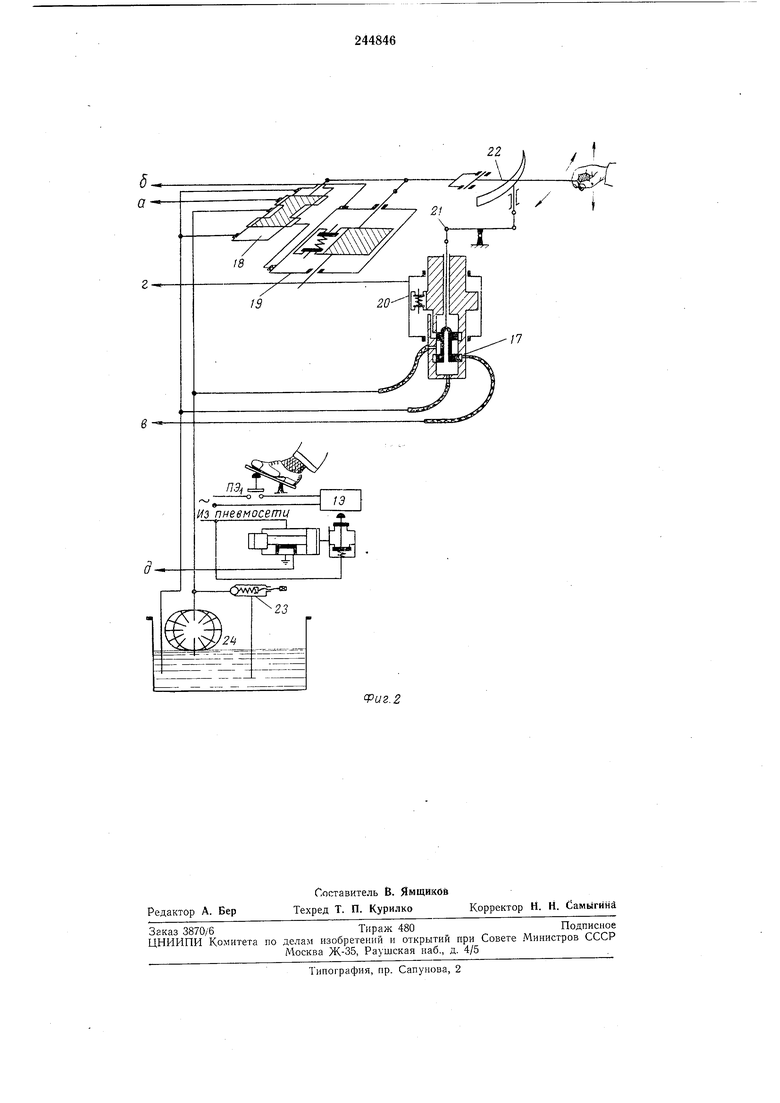
Иа .фиг. 1 - схема исполнительного мехаiH-изма; на фиг. 2 - схема задающего механизма с гидроприводом.
чи приводит .во вращение ведущую зубчатую полумуфту 1. Ведомая лолумуфта 2 в выключенном состоянии удерживается кулачком 3 и роликом на Штоке поршня цилиндра 4 включения. Положение муфты фиксируется конечным выключателем ВК.. Па ведомом валу смонтирован тормоз 5. Скорость приводного электродвигателя переключается по командам конечных выключателей ВК-2-BKt, на которые воздействуют кулачки командоаппарата 6. Кривошипный вал 7 через шатун 8 соединен с кулисой 9. Камень 10 кулисы связан с поршнем гидравлического исполнительного цилиндра 11 через рычажную систему 12.
Положение камня кулисы через рычаг 13 определяет положе.чие рычажного ходоизменителя 14, дентр качания которого связан с поршнем другого исполнительного цилиндра 15. Золотник молота соединяется с рычажным ходоизменителем через тягу 16.
Пульт дистанционного управления ковочным молотом состоит из двух следящих золотников 17 и 18, распределяющих потоки рабочей жидкости между полостями исполнительных гидроцилиндров 11 и 15 через дозировочные объемные цилиндры-датчики 19 и 20. Рычажная система 21 связывает следящие золотники с рукояткой 22 управления.
рой установлен насос 23 с приводным электродвигателем и напорным золотннком 24.
Устройство работает следующем образом.
Включают приводные электродвигатели кулисного механизма и насосной установки. Агрегаты устройства работают холостым ходом. При смещении рукоятки 22 вверх-вниз перемещается золотник 17, а ВПраво-влево - золотник 18. При смещении золотника 18 влево поток рабочей жидкости лропускается в левую полость цилиндра-датчика 19, порщень которого вытесняет из правой полости объем рабочей жидкости в -верхнюю полость исполнительного гидроцилиндра 11. Объем .рабочей жидкости из нижней полости исполнительного гидроцилиндра // вытесняется по трубопроводу через золотник 18 в бак насосной установки. Перемещением рукоятки управления вправо потоки рабочей жидкости изменяются на обратные.
Таким образом, движением рукоятки задается через дистанционную гидравлическую систему стабильное положение камня кулисы в ее прорези.
Положение камня в прорези кулисы определяет амплитуды движения золотника молота через рычажный ходоизменитель 14 и частоту ударов - через кулачковый командоаппарат жидкость в полости которого подается через трубопроводы а и б.
Центр качания золотника молота при ударах задается движением рукоятки 22 вверхвниз. При отклонении золотника 17 поток рабочей жидкости поступает по трубопроводу в-в левую полость исполнительного цилиндра 15, золотник молота поднимается, и подающие части опускаются. Поток рабочей жидкости из правой части исполнительного цилиндра 15 по трубопроводу г-г поступает в верхнюю полость цилиндра-датчика 20. Из ее нижней полости рабочая жидкость вытесняется через следящий золотник на слив в гидробак.
При подъеме золотника 77.вверх потоки рабочей жидкости изменяются на обратный.
Положение падающих частей молота перед и после удара задается смещением рукоятки вверх-вниз.
Включают молот на серию ударов нажатием электропедали ПЭ. При этом электромагнит 1Э через трехходовой клапан ,и воздухораспределитель пропускает сжатый воздух по трубопроводу д-д в левую полость цилиндра 4, последний включает муфту. Молот .наносит удары до тех пор, пока нажата электропедаль ПЭ. Энергия ударов при этом изменяется смещением рукоятки вправо- влево и вверхвниз. Для нанесения одиночного удара оператор нажимает вторую электропедаль, в цепи которой включен блокирующий конечный выключатель BKi, на который воздействует ведомая полумуфта при своем аксиальном смещении. BKi отключает питание электромагнита 1Э после включения муфты. Это позволяет кривошипному валу кулисного механизма совершить только один оборот.
Предмет изобретен и я
Механизм дистанционного управления паровоздушным ковочным молотом, выполненный в виде сервопривода, соединенного системой тяг и рычагов с рукояткой управления и с золотником молота через камень кулисного механизма, и снабженный многоскоростным приводом, отличающийся тем, что, с целью сокращения времени технологического цикла и повышения к. п. д. молота, в сервопривод
встроен гидравлический цилиндр, шток поршня которого соединен с рычагом, связанным одним концом с камнем кулисного механизма, а другим жестко - с кулачковым валом командоаппарата изменения числа оборотов
многоскоростного привода, при этом последний снабжен муфтой включения, выполненной с механизмом останова ее в требуемом положении.
Фиг II 23
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННО-ПРОГРАММНОГО УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМИ МОЛОТАМИ | 1970 |
|
SU276706A1 |
| Радиально-ковочная машина | 1978 |
|
SU729915A1 |
| МОЛОТ ПАРОВОЗДУШНЫЙ | 1967 |
|
SU200397A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМКОВОЧНЫМ молотом | 1969 |
|
SU238318A1 |
| ПНЕВМОЭЛЕКТРИЧЕСКОЬ УСТРОЙСТВО УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ | 1968 |
|
SU208422A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| ПАРОВОЗДУШНЫЙ КОВОЧНЫЙ молот | 1968 |
|
SU206981A1 |
| Система дистанционного управления паровой поршневой машиной с инжекционной конденсацией | 1953 |
|
SU107987A1 |
| ПАРОВОЗДУШНЫЙ молот | 1967 |
|
SU199645A1 |
| Бесшаботный молот | 1983 |
|
SU1076174A1 |