Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может быть использовано для регулирования момента, скорости и положения рабочих органов, в
том числе в станкостроении и робототехнике для приводов подач и главного движения станков.
Цель изобретения - повышение энергетических и динамических показателей электродвигателя при повышении точности регулирования момента и скорости за счет регулируемой ориентации вектора тока статора относительно продольной магнитной оси ротора, расширение функциональных свойств и диапазона регулирования скорости за счет обеспечения режима постоянства мощности при ослаблении магнитного взаимодействия статора и ротора,
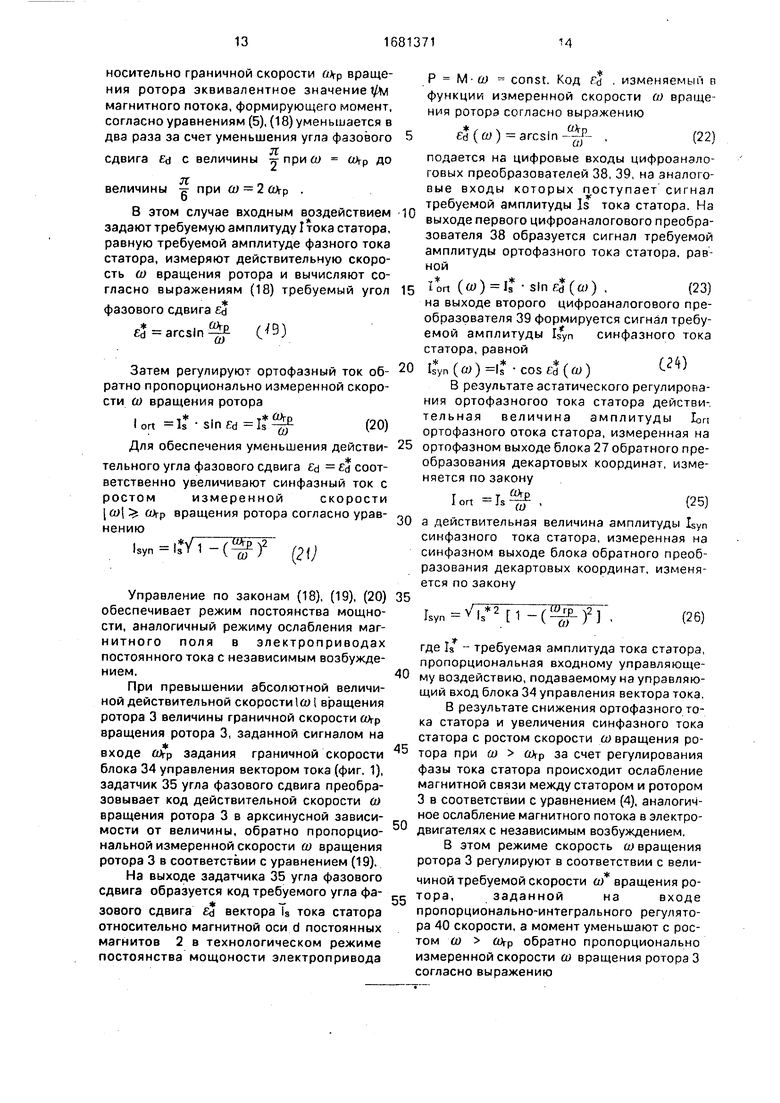
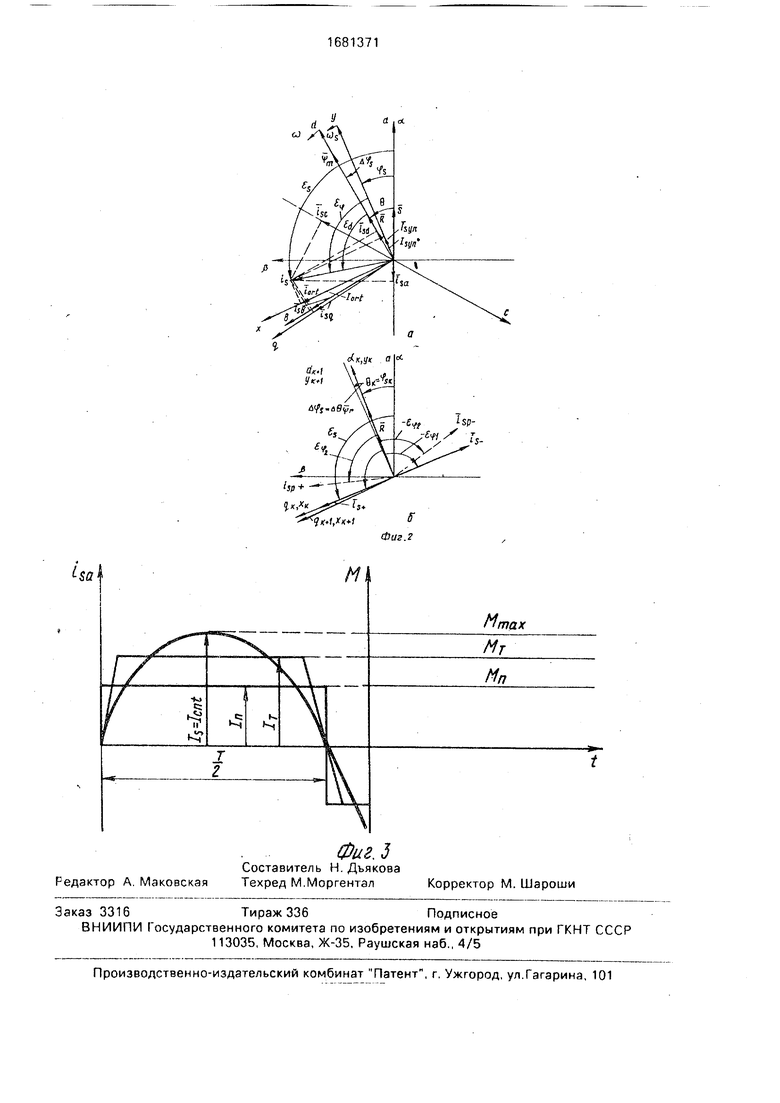
На фиг. 1 представлена функциональная схема электропривода с синхронным электродвигателем; на фиг. 2 а, б - векторные диаграммы токов, поясняющие способ векторного управления электродвигателем; на фиг. 3 -диаграмма, поясняющая фазото- ковое регулирование момента и мощности.
Электропривод с синхронным электродвигателем с постоянными магнитами на роторе (фиг. 1) содержит синхронный электродвигатель 1 с постоянными магнитами 2 на роторе 3, импульсный датчик 4, на вращающейся части 5 которого, жестко связанной с валом ротора 3, расположена нулевая метка 6, На неподвижной части 7 импульсного датчика 4 установлены индикатор 8 нулевой метки с выходом 9 индикатора 8 нулевой метки и блок 10 формирования счетных импульсов.
Клеммы фазных обмоток опорных фаз А, В, С статора.электродвигателя 1 через датчики 11,12 фазного тока статора подключены к силовым выходам инвертора 13, содержащего силовые ключи в каждой из опорных фаз А, В, С. Управляющие входы 14, 15 силовых ключей фазы а образуют управляющие входы 14, 15 опорной фазы А. К управляющим входам инвертора 13 подключены входы блока 16 широтно-импульс- ной модуляции, содержащего генератор 17 несущего сигнала, фазные компараторы 18а, 18Ь, 18с с фазными формирователями 19а, 19Ь, 19с управляющих импульсов, ши- ротно-модулированная по синусоидальному закону последовательность выходных импульсов которых управляет переключением силовых ключей инвертора 13 с несущей частотой, задаваемой генератором 17 несущего сигнала.
Фазные входы блока 16 широтно-им- пульсной модуляции соединены с фазными входами блока 20 регуляторов фазного тока, осуществляющего пофазное регулирование мгновенных фазных токов ia. ь. ic синусоидальной формы.
На вход блока 20 регуляторов фазного тока, содержащего фазные регуляторы 20а, 20Ь, 20с и сумматор 21, поступают сигналы отрицательных обратных связей с выходов датчиков 11, 12 фазного тока статора и синусоидальные сигналы задания фазных тож % ков а , 1ь , с , формируемые на выходе блока
22 сумматоров и на выходе векторного регулятора 23. При этом выход ос векторного регулятора 23, образующий опорный выход,
подключен непосредственно к управляющему входу блока 20 регулятора фазного тока и выполняет функцию формирования тока статора синусоидальной формы в опорной фазе А статора.
0Векторный регулятор 23 содержит блок
24 прямого преобразования декартовых координат, на входы которого подключены регулятор 25 ортофазного тока и регулятор 26 синфазного тока.
5 Отрицательные обратные связи на входах регуляторов 25, 26 ортофазного и синфазноготоковобразованысоответствующими ортофазными и синфазными выходами блока 27 обратного преоб0 разования координат, два входа которого подключены к выходам датчиков 11,12 фаз- ногоо тока статора.
На два цифровых входа векторного регулятора 23 поступают коды синусной и ко5 синусной соответственно функций угла поворота ротора 3 с выходов синхронизатора 28, входы которого связаны с входами импульсного датчика 4.
Цифровые коды синусной и косинусной
0 функций одновременно поступают на синусные и косинусные соответственно входы блока 24 прямого преобразования декартовых координат и блока 27 обратного преобразования координат векторного
5 регулятора 23, обеспечивая синхронизацию вращения ротора 3 и вращения декартовой системы координат, в которой производится регулирование ортофазного и синфазного токов.
0Синхронизатор 28 содержит синусный
преобразователь 29 кода, косинусный преобразователь 30 кода, реверсивный счетчик 31 и блок 32 преобразования частоты импульсов синхронизации, который осуществ5 ляет деление частоты счетных импульсов импульсного датчика 4 на целое число, зависящее от числа пар полюсов Zp синхронного электродвигателя 1 с постоянными магнитами 2.
0Вход 33 установки нуля синхронизатора
28, подключенный к выходу 9 индикатора 8 нулевой метки импульсного датчика 4, устанавливает реверсивный счетчик 31 в нулевое состояние при совпадении углового
5 положения нулевой метки 6 на вращающейся части 5 с угловым положением индика го- ра 8 нулевой метки на неподвижной части 7 импульсного датчика 4. Счетные входы реверсивного счетчика 31 подключены к входам блока 32 преобразования частоты
импульсов синхронизации, выходы которого подключены также к входу блока 34 управления вектором тока, содержащим задатчик 35 угла фазового сдвига, синусный и косинусный преобразователи 36, 37 кодов и два цифроаналоговых преобразователя 38, 39, объединенные аналоговые входы которых подключены к выходу регулятора 40 скорости.
Счетные импульсы с выходов синхронизатора 28 поступают одновременно на вхб- ды задатчика 35 угла фазового сдвига и регулятора 40 скорости.
На задающий вход задатчика 35 угла фазового сдвига поступает сигнал задания
граничной скорости ftvp , а на задающий вход регулятора 40 скорости - сигнал задания скорости О) . Блок 34 управления вектором тока, включенный между регулятором 40 скорости и задающими входами , Isyn векторного регулятора 23, устанавливает соотношение между величинами ортофаз- ного и синфазного токов в зависимости от соотношения текущей скорости ротора 3 и
заданной граничной скорости (ftp .
Сущность способа векторного управления синхронным электродвигателем 1 (фиг. 1), в том числе с постоянными магнитами 2 на роторе 3, заключается в том, что момент М регулируют при питании статорных обмоток симметричными синусоидальными фазными токами Tsa, ub, Tsc (фиг. 2а), угол фазового сдвига Јd которых относительно продольной магнитной оси d ротора 3 формируют за счет векторного регулирования фазных токов в зависимости от заданных величин момента М граничной скорости аЈр путем раздельного измерения и регулирования амплитуд Isyn, lort синфазного (косинусои- дального) и ортофазного (синусоидального) периодических токов Гзул, Tort, разность мгновенных величин которых образует фазные токи Isa, isb, Uc. При этом угловая ориентация вектора тока статора
(ГМ +Tsb -Hsc )(1)
относительно продольной магнитной оси d ротора 3 производится путем синхронизации дискретного изменения фазы указанных периодических токов isyn, lort с появлением очередного импульса датчика 4, вращающаяся часть 5 которого, содержащая нулевую метку 6, установлена на роторе 3 и сориентирована так, чтобы нулевая метка в геометрически совладала с продольной магнитной осью d ротора 3 (с магнитной осью постоянных магнитов 2). Неподвижная часть 7 датчика 4, содержащая индикатор 8
нулевой метки, жестко закреплена на стато- ре электродвигателя 1 и сориентирована относительно опорной магнитной оси а одной из фазных обмоток статора, напри- 5 мер опорной фазы А, так, что угловое положение индикатора 8 нулевой метки геометрически совпадает с осью а. Поступающий с выхода 9 индикатора 8 нулевой метки импульс устанавливает вектор тока
10 статора Is в нулевую начальную фазу с нулевым мгновенным значением ортофазного тока lort в опорнй фазе А статора. При вращении ротора 3 нулевая начальная фаза синхронизации фазного тока isa в опорной
15 фазе А задается в момент совпадения пространственных угловых положений нулевой метки 6 и индикатора 8 нулевой метки. Частота синфазного и ортофазного токов ЦР, lort в каждой фазной обмотке статора изме0 няется пропорционально частоте вращения ротора 3 за счет поступления счетных импульсов с выхода блока 10 формирования . счетных импульсов на счетные входы синхронизатора 28, формирующего синусную и
5 косинусную функции угла поворота ротора 3 относительно неподвижной опорной оси а, совпадающей с магнитной осью а опорной фазной обмотки А статора.
Вектор тока статора ls, образуемый по
0 уравнению (1) симметричной системой фазных токов Tsa, Tsb, Isc, регулируется в декар- товых координатах у, х (фиг. 2а), ориентированных осью у вдоль продольной магнитной оси d ротора 3, благодаря
5 векторному регулятору 23 (фиг, 1),
При этом момент М двигателя формируется равным заданному моменту М пропорциональному сигналу с выхода регулятора 40 скорости, в соответствии с
0 уравнением
М 7b|zp#T, Is sinfid(2)
где Zp - число пар полюсов;
Дп -амплитуда фазного потокосцепле5 ния , возбуждаемого постоянными магнитами;
Is - амплитуда фазного тока статора, равная модулю вектора тока статора Is lTsl |isal ;
0Јd - угол фазового сдвига вектора Is
тока статора относительно вектора т по- токосцепления.
В нижнем диапазоне регулирования скорости при со «Игр согласно уравнению
5 (2) оптимальный по максимуму момента М при ограниченной амплитуде Is тока статора режим при постоянстве амплитуды tym по- токосцепления в воздушном зазоре соответствует условию
Ed
л; 2
что реализуется при регулировании на нулевом уровне синфазного тока и проекции Ud 0 вектора 13 тока статора, определяемого уравнением (1), на продольную ось d ротора 3, совпадающую по направлению с единичным вектором R магнитной оси ротора (фиг. 2а),
В верхнем диапазоне регулирования скорости при ослабление магнитной связи статора и ротора реализуется регулированием ортогональной составляющей 1/М вектора рт потокосцепления в воздушном зазоре относительно вектора U тока статора
М Vto SlnЈd(4)
Уменьшением регулируемого угла фазового сдвига Ed согласно выражению (4) достигается ослабление эквивалентного магнитного поля, участвующего в формировании момента, по закону
M ZPV-W
(5)
Регулирование момента по законам (2), (5) осуществляется формированием фазных токов статора в виде разности двух регулируемых фазных токов статора, периодически изменяющихся при изменении фазы ( синхронизации, равной углу вращающейся декартовой системы координат у, х (фиг. 2а) относительно опорной оси а, совпадающей с магнитной осью а опорной фазы А статора.
Первый из этих двух периодических фазных токов статора - синфазный ток статора - совпадает по фазе с фазой s синхронизации и регулируется согласно выражениям:
Isyna Ssyn COS ps
Isynb Isyn COS ( isyn COS (
2л
(6)
isync
3 47Г
3
где isyna, isynb, Uync синфазные токи статора а фазных обмотках А, В, С статора;
Isyn - амплитуда синфазного тока статора;
ips - фаза синхронизации, равная изменяемой фазе синфазного тока.
Симметричная система синфазных токов Isyna, isynb. Isync, регулируемых по закону (б), образует вектор isyn синфазного тока статора (фиг, 2а). Второй из двух периодических фазных токов статора опережает фазу р$ синзронизации или отстает от нее на я
угол ниям:
у и регулируется согласно выражеlorta +l ort Sin p$
171
lortb. + tort Sin ( ps -3-)
4 д iortc + lort Sin ( ps3-
где lorta, lortb, Iortc - ортофазные токи статора в опорных фазах А, В, С статора;
lort амплитуда ортофазного тока статора;
- фаза синхронизации, ортогональная по отношению к ортофазному току.
Симметричная система ортофазных токов, регулируемых по закону (7), образует вектор iort ортофазного тока статора 5 (фиг. 2а).
Фазные токи статора формируют равными разности соответствующих регулируемых синфазных и ортофазных токов статора:
Isa Uyna lorta,
Ub isynb lortbi
Isc isync Iortc.
При задании нулевой амплитуды lsyn О
синфазного тока согласно уравнениям (б),
5 (7), (8) фазные токи статора сдвинуты по фазе
.л,
на угол ±7 относительно фазы синхронизации.
Для того, чтобы в любых режимах неза0 висимо от возмущений со стороны нагрузки
и управляющих воздействий вектор is тока
статора составил прямой угол ± - относительно продольной оси ротора, необходи5 мого регулировать нулевой синфазный ток и совмещать фазу р$ синхронизации с угловым положением 0 магнитной оси ротора относительно опорной оси d стйтора (фиг. 26) по закону
0 ZP в ,(9)
где Zp - число пар полюсов электродвигателя;
9- угловое положение магнитной оси ротора относительно магнитной оси опор5 ной фазной обмотки статора.
Уравнение (9) реализуется с помощью инкрементального (импульсного) датчика с нулевой меткой на вращающейся части указанного датчика, жестко закрепленной на
0 роторе синхронного электродвигателя 1 с постоянными магнитами (фиг. 1).
Индикатор 8 нулевой метки, установленный на неподвижной части инкрементального датчика 4, совмещают с магнитной
5 осью а опорной фазной обмотки А статора, а нулевую метку 6 на вращающейся части располагают вдоль магнитной оси d ротора 3 по продольной оси R ротора
Задавая после этого нулевую начальную фазу синхронизации в момент прохождения нулевой метки и продольной оси d по магнитной оси а опорной фазы А статора, обеспечивают дальнейшее выполнение уравнения (9).
Измеряя амплитуды синфазного и орто- фазного токов относительно продольной оси d ротора и вектора R магнитной оси ротора по формулам:
Uyn Is cosed(10)
lort Is sin Јd(11)
где Is измеренная амплитуда фазного тока статора;
и сравнивая их с соответствующими заданными амплитудами синфазного и ортофаз- ного токов, после завершения переходного процесса путем астатического регулирования достигают равенства
Isyn Isyn ,
lort lort ,(12)
где Isyn, lort - требуемые амплитуды соответственно синфазного и ортофазного токов статора, задаваемые входными управляющими воздействиями.
При выполнении условий (9), (10), (11), (12) вектор ls тока статора занимает угловое положение es (фиг. 16) с углом фазового сдвига Ed относительно магнитной оси ротора, равным
Јd arctg -j- arctgI sym
ort
syn
независимо от возмущений со стороны нагрузки, т.е. обеспечивается векторное фазо- токовое регулирование момента синхронного электродвигателя с постоянными магнитами.
Угол фазового сдвига &р вектора is тока статора относительно фазы ps синхронизации определяет угловое положение вектора U тока статора во вращающейся декартовой системе координат у, х (фиг. 2а, 2в), а фаза ps синхронизации задает текущее угловое положение вращающейся декартовой системы координату, хотносительно неподвижной опорной оси а вектора S, совпадающей с магнитной осью а опорной фазы А статора. Это позволяет для осуществления способа векторного управления использовать известные прямое и обратное преобразования декартовых координат: прямое-из вращающейся системы координат у, х в неподвижную а./(фиг. 2а) при формировании требуемых фазных токов lsa, Ub, Isc, обратное - из неподвижной системы координат а,/ во вращающуюся у, х при
0
5
0
5
0
5
0
5
0
5
измерении амплитуд синфазного и ортофаз него токов lyyn Ion статора.
Текущее угловое положение ( синхронизации) вращающейся декартовое системы координату, х, в которой формируют и затем измеряют синфазный и ортофаз н ы и токи статора, задают у i я с в ы м положением ротора 3 путем задания начальной фазы (fiso синхрониззции при совпадении магнитной оси d ротора с магнитной осью а опорной фазы А статора, и затем путем дискретного изменения фазы f синхронизации относительно начальной фазы /7so синхронизации относительно начальной фазы синхронизации на малую дискрету при угловом перемещении ротора на каждую дискрету Д$.
При повороте ротора 3 на угол 0. отли чающийся от фазы синхрониззции более чем на одну дискрету фазы синхронизации, очередным выходным счетным импульсом инкрементального импульсного датчика 4 дискретно сдвигают фазу р$ синхронизации на одну дискрету Дуэз в направлении поворота ротора 3, а при повороте ротора 3 на каждый полный оборот фаза р$ синхронизации обнуляется до рso - 0 с поступлением импульсз нулевой метки 6, в результате чего исключается возможность накопления ошибки по фазе y9s синхронизации относительно углового положения в ротора 3 при любом характере изменения скорости его вращения.
Жес гкая связь фазы р, синхронизации с умом 0 вектора R углового положения магнитной оси ротора 3 относительно неподвижного вектора S статора обеспечивает равенство угла фазового сдвига Ър вектора is тока статора относительно фазы синхронизации углу фазового сдвига f d вектора is тока статора относительно магнитной оси d ротора 3.
Так как с точностью до одной дискреты - Д$ (фиг. 26) углы фазового сдвига равны между собой, то, регулируя проекции вектора ls тока статора iSy. isx во вращающейся декартовой системе координат у х, достигают одновременно как регулирования его углового положения во вращающейся декартовой системе координат у, х, так и равногоо ему с точностью до одной дискреты Дб углового положения Јd вектора is тока статора относительно магнитной оси d ротора 3.
При задании требуемого момента М и формировании различного соотношения амплитуд Syn, Ion синфазного и ортофазногоо юков ciaropa согласно уравнению (13) обеспгчивлек; работа синхронного электродвигателя 1 с постоянными магнитами в од ч ом из трех оекммой с нулевым синфа HWM тс с чепулезыг синфазным око л, изменяемым в (Ьучкц и требуемого момен- ia М , с неиу звым синфазным током, изме няемым в функции измеоенной скорости it) вращения ротора
В первом режиме оптимального чо максимуму момента секторного управления с нулевым синфазным током амплитулу з то ка статора регулируют поопорциоиапы о требуемому моменгу № , а упоа ,ne ie с- тором 18 тока статора осуществляю гоп-ао- ио следующим уравнениям
Ion -KM
syr - ts
JT
I M)
где Км
lort - - 77 Is
; ПОСТОЯННЫЙ КОЭТрди-И
3ZP t/Лп ент пропорциональности,
Ss - амппиту;л фазчого гоко паторо В этом осжима момент опо в°л е согласно уравнени и (14) iont со вгя чиной амплитуды 8 фазного тока статоо максимален для заданных суммаоных тел- левых потерь ,огш it Г в ф-з.1Ь со могы/ч ста 0|ЧЗ опоедипжл 1«х по
ЛР ЗКп - -)
V/
sl
где RS акт чтное coi роч знсние & обмот и cia Cpa,
I эффективное (действующее) з т п „ ние фазного ,окас зтсра, члвчаапентчое i нагреву син пи альног у ta3HO v /To / L с.- юра
Ухрзанчнй пеоэуй Dexi/..i яз) о
НОЕНЫМ ДЛЧ СерЗОПрИВиДОБ рОбО С 0 ЬП |
водоз or a Hcv , f синхрО|| к i1 элелгродв а c;i°v,n /о. ci рукция о юь х ооеспечивае vo т с.- цию маггН1тип -о чстока, if постоянны, arnhravii/i HO .г торг И сутствиу; iai нитных пот ов р- res-i-i Дб и равенстве вектора г/v nouxocu h r- ния ротора вектору t/v поток счсиленп воздушное аазоре
§тоооп почсим реализ и ч,я Е CPOI с ip водах роботов и приводах лодзч crai ui при наличии сущеегвеж-ioi о рассеяния N нитного потока, возбуждаемого посгояь ь ми магнатами В этом глу-и° экспериментально устан ьливтю DI и
мальную зависимость угла C/ JJPSTO r ,п rs id тока статора отнгсте о f r i /. . оси ротора в функции MOV тс I/IR а„ г го фиксированного г , , 1 грузки npii разги .чых J1 с г а ч,г, ортофазсогс и он о . о н, п - - воряющую к-ритири с cir - t - i i, оавпения по мз ссимум. i т -I ,2 i- 1
o t i- i ,
/ vi
i mu
iS
1 , i, i ,T I I js .r ь г, -5, i ,ii rffiioC Г,О
fO Г , - i j - 0/l(1 OClj,
.с °алс1 ия j i iHi% r n j ioti тр e п
Яд ЛИ /ДЫ isvr о lrO TO S CiciT a
в i ue - oi с iji i г f i о / t i/ e ear iQ-rot i т т а г г о( н i f f c1 -
(ЗЬуЭМО О Cr-.,ei rei i j v3 Of ПГ ТСЛЬЧОГП Л тЭГГ Ч г CCS. г& J
P riinsioti T,I т Аир г j
Я Г J
Sort К ч VI svn .б V
/
--я,сг&}(5.71
М - и
(ДС ч. - on L ;л п -лп -( n f/чо ( I V о
ЧПГ I | I , - ,- Г S Р it
f Г 110
1 ../ i i D/ i r f TP Ci/, , и IеSO I - i i Т i i.
)i i / oi v. О ой L,i Orf Ji e - f с J
г i j ен ,ц я пг,.1пог;оБ Пг -и -с г,г ч-J 1я еттлпоооргС тгыра j viy - е-чгм г
v lOJoiy Т0 ЛО ИЧ С у С j 1в)Э 1 13 lO /S V38Ji 1uc-- t Cp t bJP
л, nQ.Ofjj |р4б/Ю1 1 Cp LC . nui,3- Т Sd МОЩНПС1 - IV С i-o i 1i 1 Г
- i °oot/ s .an iijn4 c/opocr i/Jr-i взчще
Г.ОО
о jiov, оочимс fr г1 нт
Ubf Clii C - ),0 s ГГ vj 0 ponrrj
j f/л ;Vo . i i - с-п TT-ч ,е fs in лэ tt/ iono сч tj i } -j v31 M ua is тс .p
7- 7 fTcHu МйГп Hi i j , r 3, r
и л поевы 4-щи збоп iHji ic/ i r- epeiHf счоргс j, dps i6HiiF, .ooa uuc j. аньчнгй uro ucn i p эрз1,Ри|и po- opa R сисупетствчи - Ociwe- -M i
tin,
in f j - -
3)
n Mp
Чапр1мег1 f.p- увель upj.it орост i J i тл i P -ля до oaiьг peniM ii -носительно граничной скорости Шгр вращения ротора эквивалентное значение М магнитного потока, формирующего момент, согласно уравнениям (5), (18) уменьшается в два раза за счет уменьшения угла фазового
сдвига Јd с величины у при о ft)rp до
л величины при (а - 2 ovp .
В этом случае входным воздействием задают требуемую амплитуду I тока статора, равную требуемой амплитуде фазного тока статора, измеряют действительную скорость О) вращения ротора и вычисляют согласно выражениям (18) требуемый угол
фазового сдвига Јd
Јd arcSin C 3)
О)
Затем регулируют ортофазный ток обратно пропорционально измеренной скорости а) вращения ротора
, т
ГР
lort Is Sin % Is -fif(20)
Для обеспечения уменьшения действительного угла фазового сдвига Ed - Јd соответственно увеличивают синфазный ток с ростом измереннойскорости
со (Огр вращения ротора согласно уравнению
- 2 - Is г i - ( )
CO
(2i)
Управление по законам (18), (19), (20) обеспечивает режим постоянства мощности, аналогичный режиму ослабления магнитного поля в электроприводах постоянного тока с независимым возбуждением.
При превышении абсолютной величиной действительной скорости со вращения ротора 3 величины граничной скорости Одр вращения ротора 3, заданной сигналом на
входе ОА-р задания граничной скорости блока 34 управления вектором тока (фиг. 1), задатчик 35 угла фазового сдвига преобразовывает код действительной скорости ш вращения ротора 3 в арксинусной зависимости от величины, обратно пропорциональной измеренной скорости ш вращения ротора 3 в соответствии с уравнением (19). На выходе задатчика 35 угла фазового сдвига образуется код требуемого угла фазового сдвига Јd вектора ls тока статора относительно магнитной оси d постоянных магнитов 2 в технологическом режиме постоянства мощоности электропривода
10
15
20
Р М-и) const. Код fd изменяемый в функции измеренной скорости ш вращения ротора согласно выражению
) arcsln-ft - ,(22)
подается на цифровые входы цифроанэло- говых преобразователей 38, 39, на аналоговые входы которых поступает сигнал требуемой амплитуды Is тока статора. На выходе первого цифроаналогового преобразователя 38 образуется сигнал требуемой амплитуды ортофазного тока статора, равной
lort O)J ) ,(23)
на выходе второго цифроаналогового преобразователя 39 формируется сигнал требуемой амплитуды Isyn синфазного тока статора, равной
О) 1 COS С О)tW
В результате астатического регулирования ортофазногоо тока статора действительная величина амплитуды Ion ортофазного отока статора, измеренная на 25 ортофазном выходе блока 27 обратного преобразования декартовых координат, изменяется по закону
.(25)
30 а действительная величина амплитуды Isyn синфазного тока статора, измеренная на синфазном выходе блока обратного преобразования декартовых координат, изменяется по закону
35
Vi,(
Шгр О)
л
(26)
где Is - требуемая амплитуда тока статора, пропорциональная входному управляюще- Му воздействию, подаваемому на управляющий вход блока 34 управления вектора тока. В результате снижения ортофазного тока статора и увеличения синфазного тока статора с ростом скорости а) вращения ро- тора при ш (Утр за счет регулирования фазы тока статора происходит ослабление магнитной связи между статором и ротором 3 в соответствии с уравнением (4), аналогичное ослабление магнитного потока в электро- двигателях с независимым возбуждением.
В этом режиме скорость совращения ротора 3 регулируют в соответствии с величиной требуемой скорости а) вращения ротора,заданнойнавходе пропорционально-интегрального регулятора 40 скорости, а момент уменьшают с ростом а) ШГР обратно пропорционально измеренной скорости ш вращения ротора 3 согласно выражению
(27)
что обеспечивает режим постоянства мощности Р const, требуемый для приводовглавногодвиженияметаллообрабатывающих станков.
В энергетическом отношении сущность предложенного технического решения состоит в том, что в отличие от вентильного электропривода энергетические свойства (момент, мощность, КПД) синхронного электродвигателя с постоянными магнитами как электромеханического преобразователя энергии задают не только физическими свойствами активных частей электродвига- теля, но и процессами векторного управления током статора, направленно изменяя эти свойства путем регулирования фазы перменного тока статора относительно магнитной оси постоянных магнитов.
Эффективность такого векторного фа- зотокового регулирования момента и мощности поясняется диаграммой (фиг. 3).
Вентильный электродвигатель как бесщеточный электродвигатель постоянного тока питается постоянными токами ln, поочередно протекающими в фазных обмотках статора, в связи с чем при заданных тепловых потерях в фазных обмотках статора, пропорциональных квадрату величины по- стоянного тока 1П, его длительно допустимый по нагреву момент ограничен величиной Мп, пропорциональной величине постоянного тока 1П.
Длительно допустимый по нагреву мо- мент может быть несколько повышен до величины Мт при питании фазных обмоток статора токами трапецеидальной формы, эквивалентными по нагреву обмоток статора постоянному току In.
При питании фазных обмоток статора синусоидальными токами момент ограничен не только нагревом обмоток статора, но и текущим фазовым сдвигом обобщенной намагничивающей силы статора относи- тельно намагничивающей силы ротора.
Регулируя согласно предложенному техническому решению указанный угол фазового сдвига Ed на оптимальном уровп
достигают одновременно
независимости момента М от фазового сдвига и пропорциональности момента амплитуде Is синусоидального фазного тока, действующее (эквивалентное по нагреву и мощности потерь) значение I которого в /2 раз меньше амплитуды Is.
При одних и тех же потерях мощности, определяемых по уравнению (15), и при одинаковом нагреве обмотки статора действу
. ,
не ±
ющее значение I синусоидального фазного тока равно постоянному току 1П, протекающему в фазной обмотке статора вентильного электродвигателя, в связи с чем обеспечивается равенство
Is-f2-In.(28)
Это позволяет при одном и том же нагреве обмоток статора увеличить длительный момент синхронного электродвигателя с постоянными магнитами в /2 раз, так как из уравнений (2), (3), (28) следует
Мтах ФМ„,(29)
где Мтах - максимально допустимый по нагреву длительный момент синхронного электродвигателя с постоянными магнитами при векторном управлении согласно предложенному способу;
Мп - максимально допустимый по нагреву длительный момент вентильного электродвигателя с постоянными магнитами при питании постоянными фазными токами.
Эффективность предложенного технического решения достигается за счет повышениямоментасинхронногоэлектродвигателя с постоянными магнитами на 40%, повышения точности регулирования момента благодаря снижению пульсаций мгновенной величины момента и астатическому регулированию фазы тока статора и его угла фазового сдвига относительно магнитной оси ротора.
Формула изобретения
1. Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе, согласно которому формируют в зависимости от входного управляющего воздействия фазные токи статора, равные разности двух раздельно регулируемых по амплитуде периодических токов, синусоидального и косинусоидально- го, изменяемых в функции частоты вращения ротора, отличающийся тем, что, с целью повышения энергетических и динамических показателей электродвигателя при повышении точности регулирования момента и скорости за счет регулируемой ориентации вектора тока статора относительно продольной магнитной оси ротора, расширения функциональных свойств и диапазона регулирования скорости путем обеспечения режима постоянства мощности при ослаблении магнитного взаимодействия статора и ротора, косинусоидальный ток регулируют с нулевой амплитудой,а синусоидальный - с амплитудой, пропорциональной величине входного управляющего воздействия, затем при нарастании частоты вращения ротора выше заданной граничной величины уменьшают амплитуду синусоидального тока обратно пропорционально
частоте вращения ротора и соответственно увеличивают амплитуду косинусоидального тока, при этом фазы обоих перидических токов одновременно дискретно изменяют на величину, пропорциональную приращению угла поворота ротора, образуя дискретное приращение фаз, мгновенную величину синусоидального тока и фазу косинусоидального тока в одной из фазных обмоток статора, образующей опорную фазную обмотку, регулируют равными нулевым значениям при условии совпадения продольной магнитной оси ротора с магнитной осью опорной фазной обмотки статора.
2. Способ поп, 1,отличающийся тем, что дискретное приращение фаз периодических токов формируют в момент появ0
ления счетного импульса с помощью импульсного датчика, установленного на электродвигателе, а нулевую фазу косинусоидального тока в опорной фазной обмотке задают в момент появления импульса нулевой метки импульсного датчика, вращающаяся часть которого, содержащая нулевую метку, установлена на роторе и сориентирована так, чтобы нулевая метка геометрически совпадала с продольной магнитной осью ротора, а неподвижная часть импульсного датчика, содержащая индикатор нулевой метки, жестко закреплена на статоре и сориентирована так, чтобы угловое положение индикатора нулевой метки геометрически совпадало с магнитной осью опорной фазной обмотки статора.







Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может быть использовано для регулирования момента, скорости и положения рабочих органов, в том числе в станкостроении и робототехнике. Цель изобретения - повышение энергетических и динамических показателей электродвигателя при повышении точности регулирования момента и скорости за счет регулируемой ориентации вектора тока статора относительно продольной оси ротора, расширение функциональных свойств и диапазона регулирования скорости за счет обеспечения режима постоянства мощности при ослаблении магнитного взаимодействия статора и ротора. При нарастании частоты вращения ротора выше заданной граничной величины уменьшают амплитуду синусоидального тока обратно пропорционально частоте вращения ротора. Соответственно увеличивают амплитуду косинусоидального тока. Фазы обоих токов одновременно дискретно изменяют на величину, пропорциональную приращению угла поворота ротора, образуя дискретное приращение фаз. Мгновенную величину синусоидального тока и фазу косинусоидального в одной из фазных обмоток статора регулируют равными нулевым значениям при условии совпадения продольной магнитной оси ротора с магнитной осью фазной обмотки статора. Дискретное приращение фаз периодических токов формируют в момент появления счетного импульса с помощьюимпульсногодатчика установленного на двигателе Нулевую фазу косинусоидального тока задают в момент появления импульса нулевой метки импульсного датчика. Вращающаяся его часть с нулевой меткой установлена на роторе и ориентирована с возможностью совпадения нулевой метки с продольной магнитной осью ротора. Неподвижная часть с индикатором нулевой метки жестко закреплена на статоре и сориентирована так, чтобы угловое положение индикатора нулевой метки геометрически совпадало с магнитной осью фазной обмотки статора. 1 з п ф-лы, 3 ил О 00
Фиг t
CJ
а. л
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
