Изобретение относится к электротехнике и может быть использовано в областях, где необходимо осуществлять бесконтактное преобразование угла поворота вала в напряжение и уп равление углом поворота.
Целью изобретения является расширение функциональных возможностей путем обеспечения управления углом поворота ротора.
На чертеже изображен бесконтактный электромеханический преобразователь .
Предлагаемый преобразователь содержит статор I магнитопровода, ферромагнитное кольцо 2, зубчатое колесо 3 с внутренним венцам, Зубча.тое колесо 4 с внешним венцом, звенья 5.1-5.3 кривошипного механизма, измерительные катушки 6.1-6.Д, катушки 7.1-7.4 обмотки возбуждения и выходной вал 8.
Статор кольцевого магнитопровода расположен в корпусе, а внутри магнитопровода статора I - цилиндрическое ферромагнитное кольцо 2, соединенное с колесом 3 с внутренним зубчатым венцом. Колесо 3 находится в зацеплении с колесом 4 с внешним зубчатым венцом, соединенным концен- трично с выходным валом 8. Колесо 4 соединено, с корпусом преобразователя через звенья 5.1-5.3 кривошипного ме ханизма, оси которых распределены равномерно по окружности и параллель ны оси этого колеса. Оси звеньев кри вошипного механизма параллельны также оси выходного йала 8. На статоре I расположены катушки 6.1-6.4 измери тельной обмотки и кашутки 7.1-7.4 об мотки возбуждения.
Преобразователь работает следующим образом.
При подаче напряжения постоянного или переменного тока в одну из катушек обмотки возбуждения, например в катушку 7.1, ротор 2 подтягивается к этой катушке, обеспечивая минимальный зазор между ними. Если подавать напряжения последовательно в катушки 7.1-7.4, то получим полное перемещение ротора в зазоре. Звенья кривошипного механизма обеспечивают возможность перемещения ротора 2 в зазоре, но исключают вращение колеса 3, а следовательно, и ротора вокруг своей оси. Таким образом, при перещении ротора колесо 3 с числом зубцов Z
15
совершает обкат без вращения вокруг колеса 4 с числом зубцов 7., , в результате выходной вал поворачивается на угол, определяемый передаточным 5 отношением этого зацепления
i
Z2
Например, при Z 516 и получаем 1 1/128.
Вращающий момент на выходном валу
М4 i -Мз 128 Mj, где М, и MJ - вращающие моменты колес 4 и 3 соответственно.
Перемещение ротора под измерительными катушками 6.1-6.4 вызывает изменение их индуктивности. Это перемещение составляет 2в, где е - эксцентриситет. Изменение индуктивности L по оси каждой измерительной катушки имеет вид (sincil), который воспроизводится с высокой точностью, так как обусловлен обкатом ротора на у, угол 360 . Ортогонально расположенные катущки позволяют воспроизводить зависимость (coseC).
в результате измерительные катуш- ки позволяют с высокой точностью определить угол поворота выходного вала (с учетом передаточного отношение редуктора) . Чередующееся расположение катушек 6 и 7 на одном магнитопрово- де уменьшает также влияние силовых катушек на измерительные.
Формула изобретения
20
30
0
5
0
5
Бесконтактный электромеханический преобразователь, содержащий статор с обмоткой возбуждения и измерительной обмоткой и ротор в виде ферромагнитного кольца, установленного в расточке статора эксцентрично относительно вала, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения управления углом поворота ротора, он снабжен кривошипным механизмом и зубчатыми колесами, одно из которых выполнено с внешним венцом, а другое - с внутренним, ферромагнитное кольцо установлено на зубчатом колесе с внутренним венцом, зацепленным с установленным на валу зубчатым колесом с внешним венцом и соединенным через кривошипный механизм со статором, а обмотки возбуждения и измерительные обмотки выполнены в виде
313126974
катушек, равномерно распределенных катушек обмотки возбуждения и иэме- по расточке статора с чередованием рительной.
Изобретение относится к электротехнике и может быть использовано для осуществления бесконтактного преобразования угла поворота вала в напряжение и управления углом поворота. Целью изобретения является расширение 7М б.и 6.3 функциональных возможностей путем обеспечения управления углом поворота. Бесконтактный преобразователь содержит статор кольцевого магнитопровода 1, внутри которого раснопожено ферромагнитное кольцо 2, соединенное с колесом (К) 3 с внутренним зубчатым венцом. К 3 находится в зацеплении с К 4, установленньсм на валу 8. К 4 соединено с корпусом преобразователя через звенья 5.1-5.3 кривошипного механизма . Оси звеньев распределены равномерно по окружности и параллельны оси К 4. На статоре расположены катушки 6.1-6.4 измерительной обмотки и катушки 7.1-7.4 обмотки возбуждения. Преобразователь осуществляет преобразование угла поворота ротора в напряжение и управление углом поворота ротора. 1 ил. КЛ 6J 71 оо ю J 7.2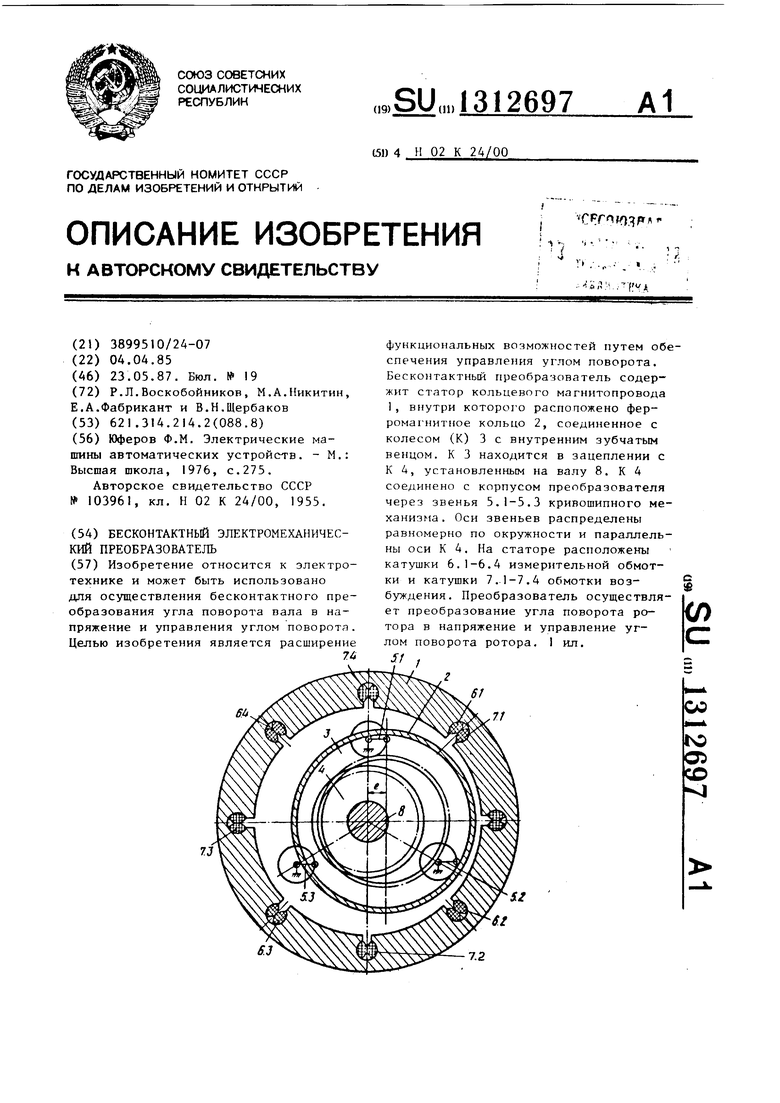
| Юферов Ф.М | |||
| Электрические машины автоматических устройств | |||
| - М.: Высшая школа, 1976, с.275 | |||
| Бесконтактный сельсин или фазорегулятор | 1955 |
|
SU103961A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
