Изобретение относится к приводному устройству для ткацкого станка и зевообразовательного механизма, содержащему средства для компенсации колебаний частоты вращения привода ткацкого станка и зевообразовательного механизма.
Из ЕР-А 0726345 известен привод, действующий через передаточные элементы на главный приводной вал, снабженный переключающим зубчатым колесом. В первом положении переключающее зубчатое колесо находится в зацеплении как с зубчатым колесом, по меньшей мере, для одного привода батана ткацкого станка, так и с зубчатым колесом, по меньшей мере, для привода зевообразователей, причем во втором положении переключающее зубчатое колесо находится в зацеплении только с одним из обоих зубчатых колес.
Из WO 98/31856 известен привод для ткацкого станка, привод которого расположен коаксиально главному приводному валу и непосредственно соединен с ним. Главный приводной вал ткацкого станка установлен с возможностью перемещения посредством гидравлической или пневматической системы перемещения в одном направлении так, что привод действует только для зевообразовательного механизма.
Далее, главный приводной вал установлен с возможностью перемещения через поле двигателя в другом направлении так, что привод действует как для батана, при необходимости также для рапир, так и для зевообразовательного механизма, т.е. это положение главного приводного вала является положением для текущего режима вырабатывания ткани.
Названные выше решения исходят из центрального привода, а также из соединения с геометрическим замыканием между ткацким станком и зевообразовательным механизмом в режиме вырабатывания ткани. Таким образом, все переменные моменты передаются через главный приводной вал или, по меньшей мере, через его отрезки. Последующие кручения вызывают передаваемые на всю конструкцию колебания, которые могут привести к ухудшению качества вырабатываемой ткани, а также имеют своим следствием высокое потребление электроэнергии системой привода и высокую частоту отказов всего станка.
Далее, соединению с геометрическим замыканием между ткацким станком и зевообразовательным механизмом присущи износ и потери.
Названные выше решения неблагоприятны также для расчета привода, поскольку соединение с геометрическим замыканием между ткацким станком и зевообразовательным механизмом всегда требует их одновременного пуска. Так, во избежание горок в ткани требуется очень высокая динамика пуска, которая по отношению к развитию ее момента требует предельно малоинерционных двигателей (приводов). Такие приводы имеют тогда в большинстве случаев недостаточный для длительной эксплуатации термический момент (номинальный момент), так что их приходится подвергать постороннему охлаждению, большей частью маслом или водой.
Другой недостаток в том, что предусмотренные в известных решениях механизмы перемещения для переключающего зубчатого колеса и для главного приводного вала являются дополнительными составляющими износа, которые, кроме того, означают дополнительные затраты на обслуживание.
Из ЕР 0893525 А1 уже известно приводное устройство для ткацкого станка, каковое приводное устройство включает в себя ткацкий станок с приводным двигателем в качестве главного или вспомогательного двигателя, зевообразовательный механизм с приводным двигателем, соответствующим главному или вспомогательному двигателю, и устройство управления. Устройство управления рассчитано для слежения за стратегией регулирования, с тем чтобы эксплуатировать вспомогательный привод в отношении главного привода с синхронным или опережающим или догоняющим угловым положением. В ЕР 0893525 А1 не раскрыто, как у такого приводного устройства можно в значительной степени компенсировать колебания частоты вращения привода зевообразовательного механизма и ткацкого станка по отношению к главному валу ткацкого станка и приводному валу зевообразовательного механизма.
Из DE 4436424 А1 известен далее способ приведения в действие ткацкого станка, при котором главный вал ткацкого станка вращают с помощью, по меньшей мере, одного приводного электродвигателя, коаксиально соединенного с главным валом. Приводной электродвигатель подключен к электросети и взаимодействует с блоком управления.
Привод срабатывает от блока управления, предпочтительно посредством синусоидальных управляющих сигналов, вырабатываемых в блоке управления, а именно таким образом, что главный вал во время соответствующего оборота вращается приводным электродвигателем ускоренно или замедленно с изменяемой скоростью вращения или угловой скоростью.
Приводной электродвигатель является при этом приводом постоянного тока, срабатывающим так, что он работает периодически как двигатель постоянного тока и как генератор постоянного тока. В случае, когда привод работает как двигатель постоянного тока, он питается энергией из токораспределительной сети, а в случае, когда привод работает как генератор постоянного тока, вырабатываемая приводом электроэнергия возвращается в токораспределительную сеть.
За счет того, что согласно известному уровню техники ткацкий станок и зевообразовательный механизм при пуске работают, по существу, синхронно, на этапе пуска электрическая сеть должна давать относительно высокую общую приводную энергию.
Это обстоятельство справедливо как для ткацких станков, оснащенных, по меньшей мере, одним главным приводным двигателем, причем привод зевообразовательного механизма осуществляется главным приводным валом ткацкого станка, так и для ткацких станков, снабженных приводным устройством по ЕР 0893525 А1.
Первая задача изобретения состоит в том, чтобы в приводном устройстве, которое обеспечивает раздельную эксплуатацию ткацкого станка и зевообразовательного механизма, в значительной степени компенсировать колебания частоты вращения привода как ткацкого станка, так и зевообразовательного механизма, по отношению к приводному валу соответственно ткацкого станка и зевообразовательного механизма.
Вторая задача изобретения состоит в том, чтобы с привлечением решения первой задачи осуществить этап пуска ткацкого станка и зевообразовательного механизма так, чтобы отбираемая из распределительной сети энергия, а также устанавливаемая мощность привода были как можно меньше.
В последующих рассуждениях употребляется понятие “текущий режим работы”. Оно означает режим работы станка или станочной системы, начиная с завершенного разгона вплоть до начала повторной остановки. Если текущий режим работы ткацкого станка и/или зевообразовательного механизма протекает с тканью, то речь идет о режиме вырабатывания ткани; понятие “режим вырабатывания ткани” включено, следовательно, в понятие “текущий режим работы”.
Согласно изобретению первая частичная задача решается посредством признаков п.1 формулы. При этом приводной вал зевообразовательного механизма снабжен дополнительными, действующими на этот приводной вал маховыми массами, которые в простейшем случае выполнены в виде соединенных с приводным валом вращательно-симметричных тел однородной плотности, так что они в значительной степени компенсируют колебания частоты вращения привода зевообразовательного механизма по отношению к приводному валу, т.е. резко уменьшают частное от максимального и минимального мгновенных значений момента инерции масс. Эти дополнительные, действующие на приводной вал маховые массы, согласно закону сохранения импульса вращения, вызывают гораздо меньшее естественное колебание частоты вращения приводного вала зевообразовательного механизма. За счет этого в текущем режиме соответственно уменьшаются необходимые положительные и отрицательные моменты ускорения для регулирования частоты вращения или положения зевообразовательного механизма, вследствие чего в свою очередь уменьшаются необходимый термический расчетный момент (номинальный момент) приводного двигателя, а также потребление приводом тока из питающей сети.
Дополнительной разгрузкой для приводного двигателя в текущем режиме является то, что благодаря устранению синхронности положения зевообразовательного механизма и ткацкого станка вне критических угловых диапазонов допустимо естественное колебание на приводном валу зевообразовательного механизма в соответствии с законом сохранения импульса вращения. Так, нагрузочные моменты на приводном валу образуются только за счет основных нитей, обусловленных трением потерь и регулирования до требуемой рабочей частоты вращения для последующего критического углового диапазона.
Основой решения второй задачи является то, что уже упомянутое устранение синхронности положения зевообразовательного механизма и ткацкого станка обеспечивает устранение связи между обоими характерами разгона, согласно DE 10053079, за счет того, что сначала включают зевообразовательный механизм и сравнительно медленно ускоряют его до рабочей частоты вращения, с тем чтобы объединить с включенным позднее, сравнительно быстро ускоренным ткацким станком своевременно до первого прибоя берда в отношении частоты вращения и положения в допусках, разрешенных для текущего режима, в частности режима вырабатывания ткани.
Соответственно наоборот возможно также более медленное по сравнению с ткацким станком повторное торможение зевообразовательного механизма до остановки. Здесь также следует сослаться на DE 10053079.
Так могут быть уменьшены требуемые моменты ускорения и торможения для привода зевообразовательного механизма; поэтому, а также на основе вышеназванных степеней свободы в текущем режиме поведение приводного двигателя зевообразовательного механизма должно быть оптимизировано не динамически, а может быть рассчитано с оптимизацией потребления.
Будучи разгружен зевообразовательным механизмом, с другой стороны, чему дополнительно способствует облегченная таким образом конструкция соответствующих передаточных ступеней ткацкого станка, привод на главном приводном валу ткацкого станка может быть выполнен меньше. Момент ускорения, требуемый, в частности, для процесса пуска, уменьшается.
Согласно изобретению здесь предусмотрено снабдить главный приводной вал дополнительными, действующими на него маховыми массами, которые в простейшем случае выполнены в виде вращательно-симметричных тел однородной плотности, так что они в значительной степени компенсируют колебания частоты вращения привода ткацкого станка по отношению к главному приводному валу, т.е. резко уменьшают частное от максимального и минимального мгновенных значений момента инерции масс. Эти дополнительные массы повышают, правда, требуемый момент ускорения, однако оказывают такое же положительное действие на расчет привода, что и у зевообразовательного механизма. Кроме того, разделение дополнительных масс по обеим сторонам главного приводного вала ткацкого станка уменьшает возникновение вызванных кручением главного приводного вала колебаний и связанных с ними, приведенных выше недостатков.
Если действие дополнительных масс, выполненных преимущественно в виде вращательно-симметричных, равномерно распределенных по массе тел однородной плотности, осуществляется на главный приводной вал ткацкого станка или на приводной вал зевообразовательного механизма через дифференциал, то по отношению к соответствующему валу помимо частичной компенсации колебаний частоты вращения привода возможна также полная компенсация. Расчет такого дифференциала, также связанный с целенаправленным уменьшением колебаний машины, происходит по математическим правилам, которые, как известно, подробно описаны в специальной литературе.
Для решения второй задачи, кроме того, согласно изобретению предусмотрено выполнение предшествующего ткацкому станку пуска зевообразовательного механизма так, что последующему пуску ткацкого станка способствуют, с одной стороны, привод зевообразовательного механизма, а с другой стороны, сообщенная зевообразовательному механизму кинетическая энергия. В остальном, вторая задача решается, согласно изобретению, посредством признаков п.23 формулы. При этом зевообразовательному механизму подходящий для остановочного режима привод придан таким образом, что его статор или ротор соединен с геометрическим замыканием и преимущественно коаксиально или через передачу с главным приводным валом ткацкого станка, тогда как, наоборот, его ротор или статор соединен с геометрическим замыканием и преимущественно коаксиально или через передачу с приводным валом зевообразовательного механизма. Далее существует возможность торможения или фиксации главного приводного вала ткацкого станка таким образом, что приводной вал зевообразовательного механизма остается свободно подвижным. Для происходящего первым разгона зевообразовательного механизма запитывают описанный выше привод, тогда как одновременно главный приводной вал ткацкого станка остается заторможенным. Так, силовое воздействие между статором и ротором привода, т.е. крутящий момент, служит для разгона зевообразовательного механизма. Зевообразовательный механизм ускоряется при этом до частоты вращения, выше требуемой для режима вырабатывания ткани частоты вращения, поскольку от него для последующего пуска ткацкого станка отбирается часть его кинетической энергии. Для пуска ткацкого станка торможение или фиксацию его главного приводного вала ослабляют; одновременно привод зевообразовательного механизма запитывают так, что в случае двигателей трехфазного тока образующее момент вращающееся поле в зависимости от типа двигателя обладает исходящей из частоты вращения зевообразовательного механизма частотой, быстро уменьшающейся или установленной с самого начала на очень малые значения или на 0 Гц. При этом следует иметь в виду, что частота вращающегося поля определяется разностью частот вращения статора и ротора, т.е. вращающееся поле в случае синхронизации при частоте 0 Гц стремится уменьшить разность частот вращения статора и ротора до 0 рад/с и поддерживать на этом значении. Так, ткацкий станок нагружается крутящим моментом, который стремится синхронизировать его в отношении частоты вращения по зевообразовательному механизму. Помимо этого может быть предусмотрен, однако, дополнительный, непосредственно приданный ткацкому станку привод, который способствует разгону ткацкого станка и для этого соответственно согласован посредством техники управления с приводом зевообразовательного механизма. В текущем режиме (вырабатывания ткани) этот привод компенсирует в первую очередь потери (из-за трения, прибойной полоски и т.д.) процесса (вырабатывания ткани) за счет соответствующего энергоподвода, тогда как привод зевообразовательного механизма действует в первую очередь как бесконтактная муфта между ткацким станком и зевообразовательным механизмом, т.е. гарантирует их синхронную по положению работу.
Процесс торможения протекает соответственно обратно процессу пуска. В принципе, могут быть использованы также двигатели нетрехфазного тока, управление или регулирование момента которых для этого согласуют с уже описанными процессами.
Из уменьшения пиковых моментов, т.е. равномерности нагрузочного поведения, и из уменьшения необходимых моментов ускорения и торможения вытекают названные преимущества не только для приводных двигателей ткацкого станка и зевообразовательного механизма, но и при расчете исполнительного звена или преобразователя данного привода.
Ткани с резко чередующимся переплетением на раппорт могут в зависимости от основных нитей вызывать от цикла к циклу резко отличающиеся нагрузочные моменты (один цикл при этом является одним полным оборотом главного вала ткацкого станка от одного прибоя берда до другого).
Для того чтобы сделать равномерной потребность в моменте по всему раппорту, допускают разность частот вращения между циклами разного переплетения. Ткацкий станок должен при этом - в целях синхронности с зевообразовательным механизмом в критическом угловом диапазоне - следовать за этим колебанием частоты вращения, из-за чего возможны отличия в кинетической энергии берда в критическом угловом диапазоне станка.
Требованию к равномерному качеству прибоя утка за счет берда соответствует известное само по себе разделение приводов для зевообразовательного механизма и ткацкого станка, причем названные отличия в кинетической энергии берда компенсируются соответствующим, отнесенным к углу станка смещением закрытия зева.
Смещение закрытия зева для воздействия на прибой утка можно предпочтительно использовать также для тканей, которые, что в большинстве случаев обусловлено уточной нитью, требуют переменных рабочих частот вращения.
При выполнении согласно изобретению по п.23 смещение закрытия зева может быть достигнуто за счет того, что между статором и ротором привода зевообразовательного механизма за счет соответствующего запитывания достигается крутящий момент, который оказывает не синхронизирующее, т.е. соединительное, а отталкивающее действие для образования разности скоростей. Также кратковременное отключение (ток=0) этого привода можно использовать для смещения по углу между ткацким станком и зевообразовательным механизмом.
Другое предпочтительное выполнение изобретения состоит в том, чтобы распределить привод для ткацкого станка по обе стороны станка или расположить его при необходимости сегментированно с распределением по всей длине главного приводного вала. В обоих случаях за счет возможности дифференцированного управления частичными приводами можно активно противодействовать, в частности, переменному проворачиванию главного приводного вала и связанным с этим колебаниям.
Далее существует возможность связать промежуточные контуры исполнительных звеньев/преобразователей зевообразовательного механизма и ткацкого станка. Так, рекуперативную энергию одного привода можно использовать в качестве полезной энергии для соответственно другого привода. Это дает также преимущества для полезной нагрузки при пуске ткацкого станка. Оптимизация взаимного энергоснабжения зевообразовательного механизма и ткацкого станка происходит при этом за счет соответствующего расчета степеней свободы движения в некритическом угловом диапазоне, а также за счет соответствующего расчета характеристики момента инерции масс ткацкого станка и зевообразовательного механизма по отношению друг к другу и за счет соответствующего расчета описанных выше дополнительных масс. Эти меры имеют смысл для минимизации и равномерности потребляемой мощности из питающей сети тогда, когда приведенный выше общий промежуточный контур не предусмотрен. В целом, с точки зрения техники привода, возникают следующие преимущества:
- меньшее потребление тока для эксплуатации всей машины (ткацкий станок и зевообразовательный механизм) по сравнению с известными решениями;
- за счет уменьшения термических расчетных моментов при одинаковой полезной мощности гораздо быстрее возникает возможность отказа от дополнительного охлаждения приводных двигателей, чем в решениях согласно уровню техники;
- за счет дополнительных масс на ткацком станке и зевообразовательном механизме возрастают внутренняя кинетическая энергия машин и тем самым невосприимчивость к слабым или колеблющимся сетям электроснабжения в текущем режиме. Это, в частности, относится к выполнениям, согласно изобретению, по п.п.1 и 23, поскольку здесь к тому же действующие в качестве муфты между ткацким станком и зевообразовательным механизмом приводы с небольшой потребляемой мощностью поддерживают синхронный ход ткацкого станка и зевообразовательного механизма, причем в случае устройства по п.23 привод ткацкого станка в качестве питающего генератора даже при полном отказе сети может посредством части кинетической энергии ткацкого станка и зевообразовательного механизма создать необходимую мощность для действующего в качестве муфты привода зевообразовательного механизма.
Устройства по п.п. с 1 по 49 обеспечивают, кроме того, также на этапе пуска и тем самым на этапе торможения более высокую невосприимчивость к слабым или колеблющимся сетям электроснабжения, поскольку для критического пуска ткацкого станка используется также кинетическая энергия зевообразовательного механизма; так, например, при пониженном напряжении в сети электроснабжения зевообразовательный механизм ускоряется до более высокой частоты вращения, так что он со своей более высокой кинетической энергией компенсирует меньшую энергию сети электроснабжения.
Изобретение более подробно поясняется ниже с помощью примеров выполнения. На чертежах (фиг.3 отсутствует) изображают:
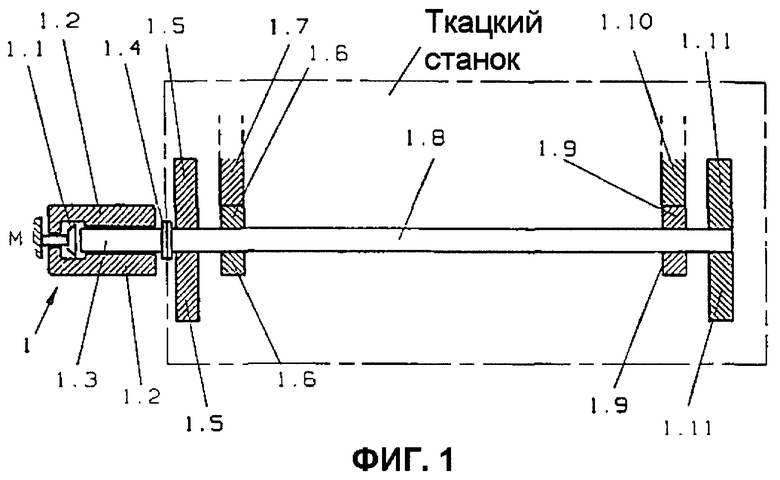
фиг.1 - схематично приводное устройство для ткацкого станка с жестко расположенными на его главном приводном валу маховыми массами;
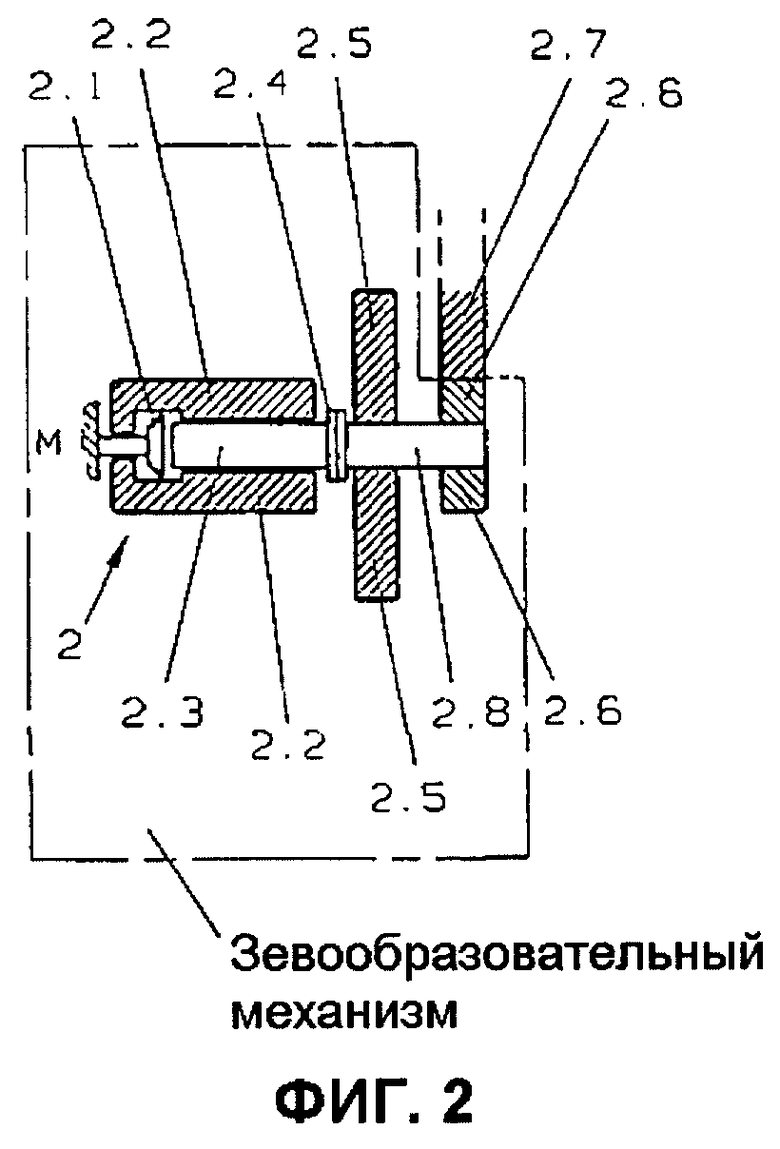
фиг.2 - схематично приводное устройство для зевообразовательного механизма с жестко расположенной на его приводном валу маховой массой;
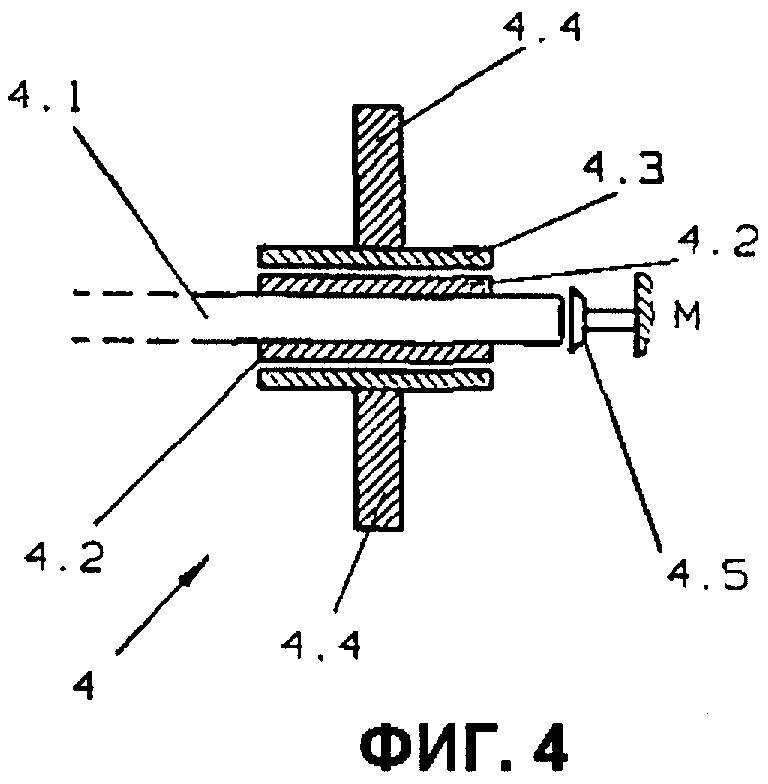
- фиг.4 - маховую массу, выполненную с возможностью связи с приводимым во вращение валом;
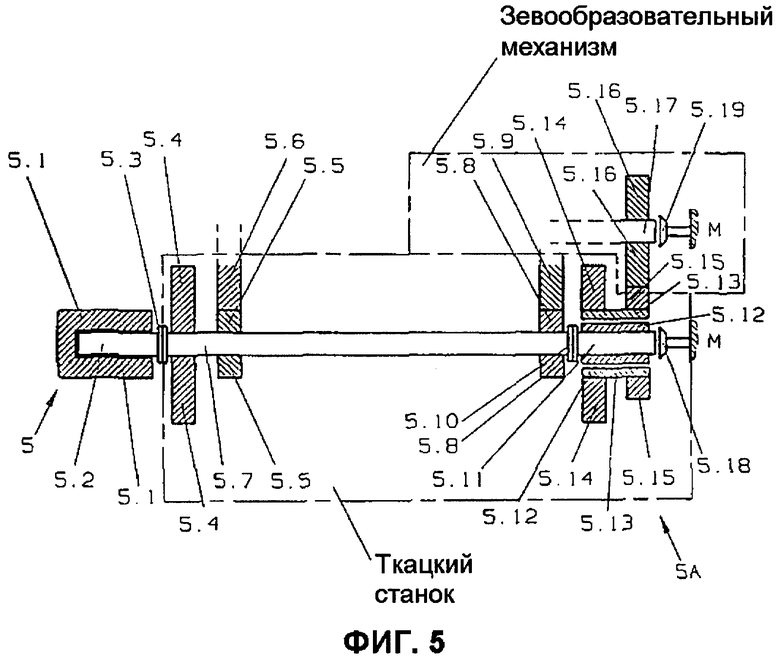
- фиг.5 - приводное устройство для ткацких станков с первым и вторым частичными приводами;
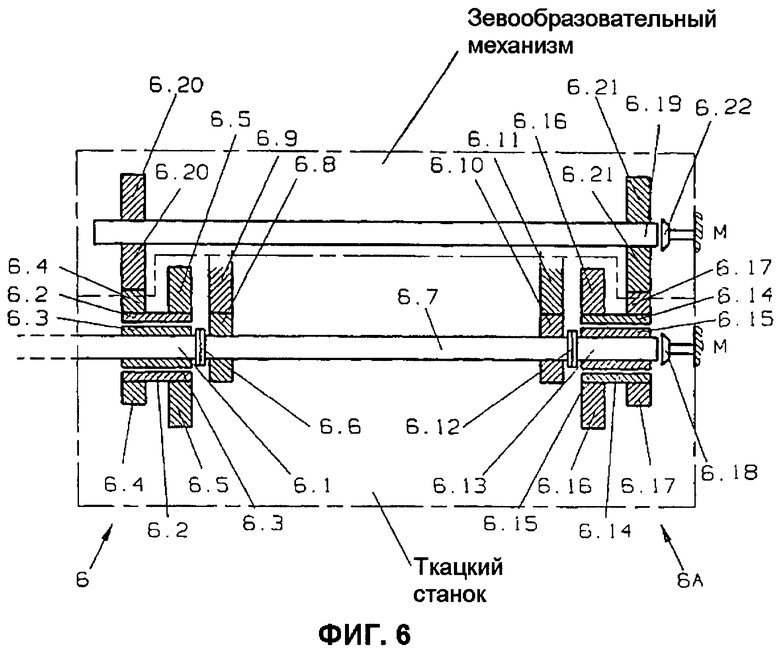
- фиг.6 - устройство, отличающееся от приводного устройства для ткацких станков по фиг.5;
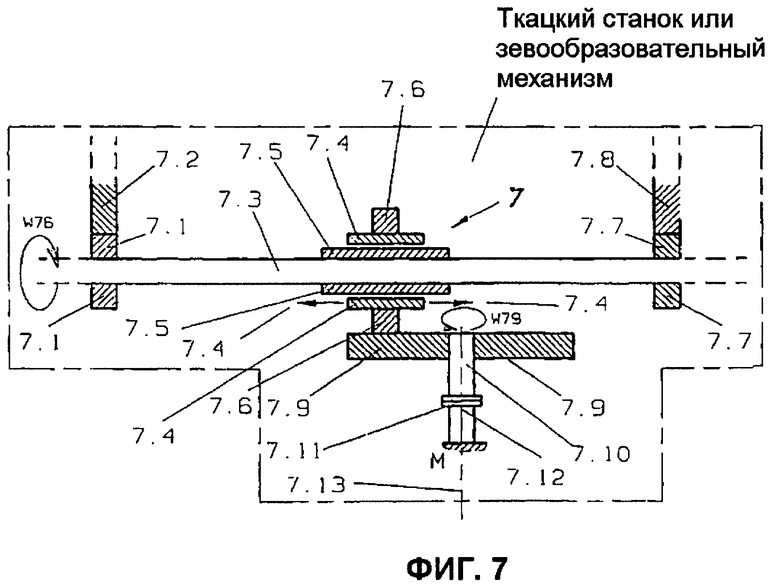
фиг.7 - приводное устройство для ткацкого станка/зевообразовательного механизма, причем приводной вал является составной частью линейного двигателя;
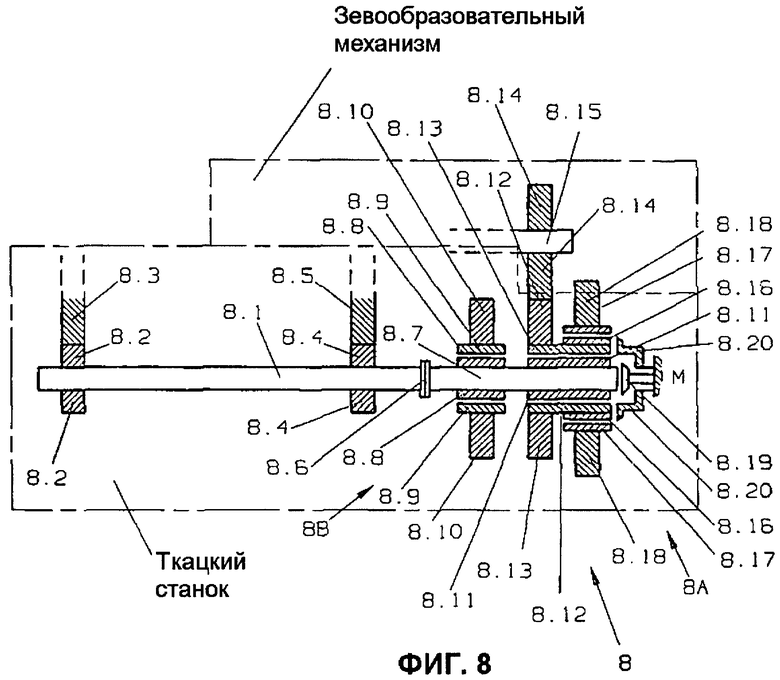
- фиг.8 - приводное устройство для ткацких станков с одним приводом и двумя действующими через дополнительные приводы маховыми массами.
На фиг.1 главный приводной вал 1.8 ткацкого станка вращается от приводного двигателя 1, состоящего из статора 1.2, ротора 1.3 и встроенного тормоза 1.1, причем последний в нормальном случае выполняет лишь функцию удерживающего тормоза для остановки станка. Ротор и главный приводной вал жестко связаны между собой муфтой 1.4. На главном приводном валу далее жестко установлены зубчатые колеса 1.6, 1.9, которые в свою очередь находятся в зацеплении с зубчатыми колесами соответственно 1.7 и 1.10.
1.6, 1.7 и 1.9, 1.10 представляют, таким образом, соответственно левую и правую стороны передачи ткацкого станка. Также жестко на главном приводном валу 1.8 установлены дополнительные маховые массы 1.5, 1.11, которые служат главным образом для компенсации колебаний частоты вращения привода ткацкого станка.
Приводной вал 2.8 схематично изображенного зевообразовательного механизма приводится согласно фиг.2 во вращение отдельным приводным двигателем 2. Этот приводной двигатель состоит из статора 2.2 и ротора 2.3, а также из встроенного тормоза 2.1, причем последний в нормальном случае выполняет лишь функцию удерживающего тормоза для остановки механизма. Ротор 2.3 и приводной вал 2.8 жестко связаны между собой муфтой 2.4. На приводном валу, далее, жестко установлено зубчатое колесо 2.6, которое в свою очередь находится в зацеплении с зубчатым колесом 2.7.
2.6 и 2.7 представляют, таким образом, передачу зевообразовательного механизма. Также прочно на приводном валу 2.8 установлена дополнительная маховая масса 2.5, которая служит главным образом для компенсации колебаний частоты вращения привода зевообразовательного механизма.
Буква М означает, что тормоза 1.1 и 2.1 вызывают остановку соответствующей машины на “массу”, т.е. по отношению к станине и земле. Для лучшей наглядности на фиг.1 и 2 помимо 1.1, 1.3, 1.4; 1.8 и 2.8 в разрезе изображены все компоненты примеров выполнения.
Фиг.3 отсутствует.
На фиг.4 изображена маховая масса 4.4, которая по отношению к валу 4.1 может быть присоединена или отсоединена посредством состоящей из частей 4.2, 4.3 бесконтактной муфты. Вместо муфты может быть использован также пригодный для остановочного режима двигатель, причем тогда 4.2 может означать статор, а 4.3 - ротор (принцип двигателя с внешним ротором) или 4.3 может означать статор, а 4.2 - ротор. Преимущественно при использовании двигателя можно, используя подходящее исполнительное звено (например, преобразователь), управлять или регулировать действующий между 4.2 и 4.3 крутящий момент. Таким образом, можно уменьшить или сделать равномерным кручение вала 4.1, за счет чего можно уменьшить также колебания на валу и улучшить плавность его хода. Далее, при использовании двигателя существует также возможность осуществить разгон и остановку (торможение до остановки) соединенной с валом 4.1 с геометрическим замыканием рабочей машины (ткацкого станка и/или зевообразовательного механизма) или поддержать другой привод. Для разгона при преимущественно заторможенной рабочей машине (и тем самым заторможенном валу 4.1; см. удерживающий тормоз 4.5) состоящий из 4.2 и 4.3 двигатель 4 запитывают так, что посредством его электрически выработанного крутящего момента происходит ускорение маховой массы 4.4 до целевой частоты вращения ω 41. Затем тормоз 4.5 рабочей машины размыкают и двигатель 4 запитывают так, что его электрически выработанный крутящий момент вызывает уменьшение разности частот вращения маховой массы 4.4 и вала 4.1 до 0 рад/с. При этом происходит энергообмен между маховой массой и рабочей машиной, т.е. маховая масса отдает энергию рабочей машине, так что в результате маховая масса 4.4 и вал 4.1 вращаются синхронно с одной частотой вращения ω 42, причем без каких-либо дальнейших мер справедливо соотношение ω 42<ω 41. Двигатель 4 работает теперь в качестве бесконтактной муфты. Остановка происходит обратно разгону, т.е. двигатель 4 запитывают так, что его электрически выработанный крутящий момент вызывает разность частот вращения между 4.4 и 4.1 с возможностью торможения 4.1 до остановки за счет действия этого крутящего момента. У рабочих машин с малыми потерями при этом, наоборот, снова повышают частоту вращения маховой массы. Можно также сказать, что при разгоне рабочей машины маховая масса 4.4 и вал 4.1 “притягивают” друг друга, тогда как при остановке рабочей машины они “отталкиваются”. Если рабочая машина заторможена до остановки, снова срабатывает удерживающий тормоз для торможения рабочей машины. После остановки рабочей машины маховая масса 4 может, конечно, вращаться по инерции или может быть через двигатель 4 остановлена с соответственно небольшой рекуперативной мощностью.
В принципе, за счет использования двигателя 4 в качестве муфты посредством этого двигателя и вышеупомянутого исполнительного звена существует также возможность преобразования энергии, отдаваемой рабочей машиной и маховой массой при торможении, не через тормозные резисторы в потери тепла, а возврата их по типу генератора, т.е. в качестве полезного торможения, в сеть электроснабжения и/или на конденсаторы и/или энергоаккумуляторы других видов.
При выполнении тормоза 4.5 следует еще учесть, что он является, правда, удерживающим тормозом, однако при этом должен обладать таким большим удерживающим моментом, чтобы обеспечивать остановку рабочей машины против моментов ускорения и замедления, действующих во время разгона и процесса повторной остановки 4.3 и 4.4.
Буква М имеет то же значение, что и на фиг.1.
На фиг.5 изображено устройство, включающее в себя прежде всего привод 5 ткацкого станка, который состоит из статора 5.1 и ротора 5.2 и через муфту 5.3 жестко соединен с главным приводным валом 5.7 ткацкого станка. На главном приводном валу жестко установлены далее зубчатые колеса 5.5, 5.8, которые в свою очередь находятся в зацеплении с зубчатыми колесами соответственно 5.6, 5.9.
5.5, 5.6 и 5.8, 5.9 представляют, таким образом, соответственно левую и правую стороны передачи ткацкого станка. Также жестко на главном приводном валу 5.7 установлена дополнительная маховая масса 5.4, которая служит главным образом для компенсации колебаний частоты вращения привода ткацкого станка.
Далее, главный приводной вал через муфту 5.10 жестко соединен с валом 5.11, который в свою очередь несет жестко установленный компонент 5.12, служащий электрически ротором или статором двигателя. Соответственно компонент 5.13 служит тогда статором или ротором, так что 5.12 и 5.13 сообща образуют двигатель 5А. Этот двигатель подходит для остановочного режима и в сочетании с соответствующим исполнительным звеном приводится в действие с возможностью управления или регулирования крутящего момента и/или механической угловой скорости между статором и ротором.
На компоненте 5.13 жестко установлены маховая масса 5.14 и зубчатое колесо 5.15, причем зубчатое колесо 5.15 в свою очередь находится в зацеплении с зубчатым колесом 5.16, 5.15 и 5.16 образуют передаточную ступень зевообразовательного механизма; зубчатое колесо 5.16 жестко установлено на приводном валу 5.17 зевообразовательного механизма.
Тормоз 5.18 выполняет в нормальном случае функцию удерживающего тормоза для вала 5.11 и тем самым для 5.7 и 5.2; тормоз 5.19 выполняет в нормальном случае функцию удерживающего тормоза для вала 5.17.
Буква М имеет то же значение, что и на фиг.1.
Следует указать на то, что компоненты 5.11, 5.12 конструктивно и функционально могут быть объединены в один компонент, т.е. точно так же, как ротор 5.2 через 5.3, ротор или статор изображенного поз. 5.12 и 5.13 двигателя 5А связан через 5.10 непосредственно с главным приводным валом 5.7.
При пуске устройства на фиг.5 сначала запитывают состоящий из 5.12 и 5.13 двигатель, который в качестве привода придан зевообразовательному механизму, тогда как тормоз 5.19 размыкают. Поскольку тормоз 5.19 остается замкнутым, 5.13 и 5.12 начинают вращаться, причем одновременно с помощью 5.13 приводятся во вращение также маховик 5.14 и зубчатое колесо 5.15. Таким образом, вращаются также зубчатое колесо 5.16 и приводной вал 5.17 зевообразовательного механизма. Посредством состоящего из 5.12 и 5.13 двигателя 5А зевообразовательный механизм ускоряется до частоты вращения ω FBM (пусть она относится к зубчатому колесу 5.15), которая лежит преимущественно немного выше рабочей частоты вращения ω Betr, нужной позднее для главного приводного вала 5.7. По достижении ω FBM, в то время как тормоз 5.18 размыкается, состоящий из 5.12 и 5.13 двигатель запитывают так, что электрически выработанный им крутящий момент создает разность угловых скоростей 0 рад/с между ротором и статором. В случае двигателя трехфазного тока это означает, что образующее момент вращающееся поле в зависимости от типа двигателя обладает либо исходящей из частоты вращения зевообразовательного механизма частотой, быстро уменьшающейся или установленной с самого начала на очень малые значения или на 0 Гц. Таким образом, главный приводной вал 5.7 ткацкого станка получает момент ускорения; ткацкий станок разгоняется, причем этот процесс разгона - соответственно синхронизированный - поддерживается состоящим из 5.1 и 5.2 двигателем 5.
Поскольку состоящий из 5.12 и 5.13 двигатель создает разность угловых скоростей 0 рад/с между ротором и статором и тем самым стремится действовать в качестве бесконтактной муфты между ткацким станком и зевообразовательным механизмом, параллельно ускорению ткацкого станка происходит уменьшение частоты вращения, т.е. замедление зевообразовательного механизма. Для того чтобы обе машины встретились при нужной рабочей частоте вращения ω Betr, упомянутое выше, преимущественно начальное ускорение зевообразовательного механизма происходило до частоты вращения ω FBM>ω Betr. Отношение ускорения ткацкого станка и замедления зевообразовательного механизма определяется в решающей степени соотношением моментов инерции масс обеих машин; за счет выбора дополнительных маховых масс можно в широких пределах повлиять на процесс разгона, а также на отношение ω FBM:ω Betr. Если ω FBM не может быть или не должна быть больше последующей рабочей частоты вращения ω Betr, то, начиная с пуска ткацкого станка для компенсации описанного выше уменьшения частоты вращения зевообразовательного механизма ко всей системе (ткацкий станок + зевообразовательный механизм, включая приводы и дополнительные массы), необходимо подать соответствующую дополнительную энергию. Это возможно, во-первых, во время пуска ткацкого станка двигателем 5 и/или 5А, а во-вторых, также после разгона ткацкого станка двигателем 5А, причем во втором случае двигатель 5 удерживает тогда главный приводной вал 5.1 ткацкого станка против выработанного 5А момента обратного действия при рабочей частоте вращения. Во втором случае, кроме того, следует обратить внимание на то, что зевообразовательный механизм должен еще по углу поворота опережать разогнанный ткацкий станок настолько, чтобы лишь по достижении рабочей частоты вращения также за счет зевообразовательного механизма оба угла поворота машин совпадали в пределах требуемого поля допусков.
За счет того, что состоящий из 5.12 и 5.13 двигатель запитывают в течение назначенного времени так, что выработанный электрически крутящий момент создает разность угловых скоростей 0 рад/с между ротором и статором, можно в текущем режиме, т.е. также в режиме вырабатывания ткани, сместить определяемое соответствующим углом поворота фазовое положение между главным приводным валом ткацкого станка и приводным валом зевообразовательного механизма в обоих направлениях. Управление или регулирование двигателя происходит при этом так, что по достижении нужного нового фазового положения произошел возврат также к режиму соединения. В процессе смещения следует - с соответствующей синхронизацией - управлять или регулировать также состоящий из 5.12 и 5.13 двигатель 5. Процесс торможения происходит обратно процессу пуска, т.е. сначала ткацкий станок за счет соответствующего запитывания состоящих из 5.1, 5.2 и 5.12, 5.13 двигателей 5,5А тормозят до остановки; по достижении остановки срабатывает тормоз 5.18. Во время торможения ткацкого станка - у станков с малыми потерями - частота вращения зевообразовательного механизма снова возрастает (соответственно обратно описанному выше процессу пуска). Начиная с остановки ткацкого станка, зевообразовательный механизм, исходя из этой частоты вращения, тормозится тогда состоящим из 5.12 и 5.13 двигателем.
Двигатели и приданные им исполнительные звенья должны отданную рабочими машинами энергию либо преобразовывать через тормозные резисторы в потери тепла, либо допускать генераторный режим, т.е. полезное торможение, т.е. преимущественно возвращать в сеть электропитания и/или на конденсаторы и/или энергоаккумуляторы других видов.
При выполнении тормоза 5.18 следует еще учесть, что он является, правда, удерживающим тормозом, однако при этом должен обладать таким большим удерживающим моментом, чтобы обеспечивать остановку главного приводного вала 5.7 ткацкого станка и всех соединенных с ним с геометрическим замыканием компонентов против моментов ускорения или замедления, действующих во время разгона и процесса повторной остановки зевообразовательного механизма.
В принципе, устройство по фиг.5 можно эксплуатировать так, что компоненты 5.12, 5.13 двигателя 5А в текущем режиме вращаются навстречу друг другу, т.е. 5А действует не как муфта, а угловая скорость между 5.12 и 5.13 соответствует сумме рабочих частот вращения ткацкого станка и зевообразовательного механизма или их обусловленных передачей кратных.
На фиг.6 изображено устройство, отличающееся от устройства на фиг.5 в основном тем, что состоящий на фиг.5 из 5.12 и 5.13 двигатель разделен на два двигателя 6,6А. Один двигатель 6, состоящий из 6.2 и 6.3, расположен слева от передачи ткацкого станка. Эта левая передача представлена при этом жестко установленной на главном приводном валу 6.7 ткацкого станка зубчатым колесом 6.8 и зубчатым колесом 6.9, находящимся в зацеплении с этим зубчатым колесом. Другой двигатель 6А, состоящий из 6.14 и 6.15, расположен справа от передачи ткацкого станка. Эта правая передача представлена при этом жестко установленным на главном приводном валу 6.7 ткацкого станка зубчатым колесом 6.10 и зубчатым колесом 6.11, находящимся в зацеплении с этим зубчатым колесом. Связь между компонентами 6.3 и 6.15 названных двигателей и главным приводным валом 6.7 происходит за счет того, что 6.3 сначала жестко соединен с валом 6.1, а 6.15 жестко соединен с валом 6.13, тогда как 6.1 через муфту 6.6, а 6.13 через муфту 6.12 жестко соединены с 6.7. Показанное на фиг.5 возможное объединение 5.11 и 5.12 в один компонент возможно также между 6.1 и 6.3, а также между 6.13 и 6.15.
Далее, главный приводной вал/приводной вал ткацкого станка и/или зевообразовательного механизма может быть использован, в принципе, непосредственно в качестве ротора или статора; муфты 6.6, 6.12 тогда были бы не нужны, точно так же, как на предыдущих фигурах могут быть не нужны 1.4, 2.4, 5.3, 5.10. С точки зрения обслуживания, однако, представляется предпочтительным допустить демонтаж электрических приводных узлов с главного приводного вала ткацкого станка или с приводного вала зевообразовательного механизма.
Маховая масса 6.5 жестко соединена с 6.2, а маховая масса 6.16 - с 6.14. Устройство на фиг.6 предпочтительно, в частности, тогда, когда привод зевообразовательного механизма может осуществляться с двух мест. При этом такой привод действует на приводной вал 6.19 предпочтительно слева и справа. На фиг.6 зубчатое колесо 6.4 жестко соединено с 6.2 и находится в зацеплении с зубчатым колесом 6.20, которое в свою очередь жестко соединено с приводным валом 6.19 зевообразовательного механизма. Далее, зубчатое колесо 6.17 жестко соединено с 6.14 и находится в зацеплении с зубчатым колесом 6.21, которое в свою очередь жестко соединено с приводным валом 6.19.
Разгон, работа и повторная остановка зевообразовательного механизма происходят, таким образом, с двухсторонним вводом и отбором момента. Для этого левый и правый приводные узлы должны быть соответственно синхронизированы. Для компенсации потерь и поддержания разгона и повторной остановки ткацкого станка используют преимущественно двигатель на фиг.5, состоящий из 5.1 и 5.2, который преимущественно через муфту жестко соединен с 6.1 и приводится в действие с другими приводами соответственно синхронно.
Буква М имеет то же значение, что и на фиг.1.
На фиг.7 изображен вал, преимущественно главный приводной вал/приводной вал ткацкого станка или зевообразовательного механизма. С этим валом 7.3 жестко соединены зубчатые колеса 7.1, 7.7; 7.1 при этом в свою очередь находится в зацеплении с зубчатым колесом 7.2; 7.7 находится в зацеплении с зубчатым колесом 7.8. Далее на валу 7.3 жестко установлен компонент 7.5, который электрически действует в качестве статора или ротора этого линейного двигателя, причем функция ротора предпочтительна для 7.4. Обе нанесенные рядом с 7.4 стрелки 7.4' обозначают линейное движение. С 7.4 жестко соединена деталь 7.6 вращения, выполненная предпочтительно в виде фрикционного колеса. Преимущественно посредством трения 7.6 соединена с силовым замыканием с действующей в качестве маховой массы деталью 7.9 вращения, которая выполнена тогда преимущественно также в виде фрикционного колеса. Компоненты 7.6 и 7.9 образуют бесступенчато регулируемую передачу; за счет регулируемой передачи с 7.6 на 7.9 можно соответственно регулировать момент инерции масс, действующий со стороны компонента 7.9 в отношении 7.3.
Такое устройство помогает в текущем режиме при смене частот вращения, часто обусловленном тканью, точно так же машину можно сначала запустить против небольшого, отнесенного к 7.3 момента инерции масс, тогда как в текущем режиме отнесенное к частоте вращения отношение b=ω 76:ω 79 между 7.6 и 7.9 уменьшается (т.е. 7.4 изменяет с 7.6 свое положение в направлении оси вращения 7.9). За счет этого уменьшения момент инерции масс 7.9 возрастает по отношению к 7.3, поскольку он по отношению к 7.3 действует с коэффициентом 1:b2=b-2.
7.9 жестко соединен с валом 7.10.
7.10 в свою очередь через установленный с возможностью бесконечного вращения в обоих направлениях подшипника 7.11 соединен с валом 7.12, который соединен с массой (пояснение к массе или букве М см. в пояснении к фиг.1). Для повторной остановки машины предпочтительно уменьшают b. Согласно закону сохранения импульса вращения, машина сама уменьшает свою скорость, за счет чего рабочий тормоз заметно разгружается, хотя воспринимаемая им кинетическая энергия из-за изменения b остается неизменной.
Другая подходящая мера по поддержанию разгона и повторной остановки соответствующей машины состоит в том, что между 7.4 и 7.5 возможно не только поступательное (линейное), но и дополнительно вращательное движение. Это вращательное движение происходит преимущественно электрическим путем, т.е. за счет соответствующего запитывания; 7.4 и 7.5 образуют тогда в дополнение к функции линейного привода подходящий для остановочного режима и в качестве муфты привод, как 5.12 и 5.13 на фиг.5. Для разгона тогда при остановленном валу 7.3 сначала до соответствующей частоты вращения ускоряют 7.9, после чего кинетическую энергию от 7.9 используют для разгона относящейся к валу 7.3 машины. Повторная остановка этой машины происходит соответственно наоборот или за счет того, что из-за прерывания соответствующего электроснабжения между 7.4 и 7.5 больше не действует крутящий момент, благодаря чему машина и маховая масса 7.9 отсоединены друг от друга.
Изогнутые стрелки обозначают зависимость направлений между ω 76: ω 79; если ω 76 изменяет направление, то ω 79 делает то же самое.
На фиг.8 изображено устройство, которое может эксплуатироваться так же, как это описано для фиг.5. Оно состоит из главного приводного вала 8.1 ткацкого станка, на котором жестко установлены зубчатые колеса 8.2, 8.4, находящиеся в свою очередь в зацеплении с зубчатыми колесами 8.3, 8.5.
8.2, 8.3 и 8.4, 8.5 представляют, таким образом, соответственно левую и правую стороны передачи ткацкого станка. Далее 8.1 через муфту 8.6 жестко соединен с валом 8.7, который в свою очередь несет жестко установленные, рассматриваемые функционально отдельно друг от друга компоненты 8.8 и 8.11. Компонент 8.8 действует электрически в качестве ротора или статора. Соответственно компонент 8.9 действует тогда в качестве статора или ротора, так что 8.8 и 8.9 образуют сообща двигатель 8В. Компонент 8.9 в свою очередь жестко соединен с маховой массой 8.10.
Также компонент 8.11 действует электрически в качестве ротора или статора двигателя. Соответственно компонент 8.12 действует тогда в качестве статора или ротора, так что 8.11 и 8.12 образуют сообща двигатель 8.
Жестко соединен с 8.12 далее компонент 8.16, действующий электрически в качестве ротора или статора. Соответственно компонент 8.17 действует тогда в качестве статора или ротора, так что 8.16 и 8.17 образуют сообща двигатель 8А. Компонент 8.17 в свою очередь жестко соединен с маховой массой 8.18.
Далее, с 8.12 жестко соединено зубчатое колесо 8.13, находящееся в свою очередь в зацеплении с зубчатым колесом 8.14.
8.13 и 8.14 образуют или представляют передаточную ступень зевообразовательного механизма; зубчатое колесо 8.14 жестко установлено на приводном валу 8.15 зевообразовательного механизма.
Тормоз 8.19 выполняет в нормальном случае функцию удерживающего тормоза для вала 8.7 и тем самым для 8.1; тормоз 8.20 выполняет в нормальном случае функцию удерживающего тормоза для 8.12 и тем самым для 8.18.
Буква М имеет то же значение, что и на фиг.1.
Следует указать на то, что компоненты 8.8, 8.7, с одной стороны, и компоненты 8.11, 8.12, с другой стороны, конструктивно и функционально могут быть объединены между собой так, что ротор или статор двигателя 8В связан через 8.6 непосредственно с главным приводным валом 8.1, а, с другой стороны, непосредственно с ротором или статором двигателя 8 или образует с ним даже технологический узел.
Для процесса пуска устройства на фиг.8 представляется несколько возможностей. Так, в соответствии с поясненным с помощью фиг.4 принципом можно сначала ускорить до соответственно требуемой частоты вращения через двигатель 8В маховую массу 8.10 и/или через двигатель 8А маховую массу 8.18, с тем чтобы затем использовать ее кинетическую энергию для пуска ткацкого станка (в случае 8.10) или зевообразовательного механизма (в случае 8.18).
Процесс пуска осуществляется следующим образом. Сначала происходит одновременный разгон 8.10 (через двигатель 8В), с одной стороны, и при размыкании тормоза 8.20 зевообразовательного механизма совместно с 8.18 (через двигатель 8), с другой стороны, т.е. двигатель 8А действует в качестве бесконтактной муфты. Направление вращения маховой массы 8.10 является встречным направлению вращения зевообразовательного механизма и маховой массы 8.18. После разгона тормоз 8.19 размыкается, а двигатель 8В запитывается так, что он, согласно пояснению к фиг.4, стремится уменьшить разность частот вращения между 8.7 и 8.10 до 0 рад/с. Таким образом, ускоряются 8.7 и тем самым главный приводной вал ткацкого станка. Поддерживается этот разгон ткацкого станка одновременным запитыванием двигателя 8 таким образом, что его электрически выработанный крутящий момент вызывает вращение компонентов 8.11, 8.12 и тем самым ткацкого станка и зевообразовательного механизма навстречу друг другу, т.е. 8.11, 8.12 “отталкиваются”. Действующие на ткацкий станок и зевообразовательный механизм ускорения (у свободной в остальном от потерь и усилий системы) находятся в обратном соотношении с их моментами инерции масс. Если двигатель 8А действует в качестве бесконтактной муфты, то с собственным моментом инерции масс зевообразовательного механизма суммируется момент инерции масс 8.18. В результате этого инерционный зевообразовательный механизм дополнительно ускоряется лишь незначительно (до рабочей частоты вращения), тогда как одновременно поддерживается быстрый разгон ткацкого станка.
В текущем режиме двигатель 8 компенсирует потери энергии ткацкого станка и зевообразовательного механизма за счет электрически выработанного крутящего момента, который поддерживает противоположные движения ткацкого станка и зевообразовательного механизма. Для того чтобы можно было варьировать соотношение ускорений ткацкого станка и зевообразовательного механизма, например для смещения фазового положения углов ткацкого станка и зевообразовательного механизма по отношению друг к другу или при смене переплетения, можно, во-первых, соответственно управлять или регулировать электрически выработанные крутящие моменты двигателей 8А и/или 8В или, во-вторых, обесточить один из двигателей 8А, 8В. Так, в первом случае за счет создания ответных двигателю 8 усилий и во втором случае за счет изменения действующего момента инерции масс ткацкого станка или зевообразовательного механизма можно варьировать соотношение ускорений ткацкого станка или зевообразовательного механизма. По достижении нужного фазового положения эксплуатируемый в это время по-другому двигатель 8А и/или 8В возвращается в режим муфты.
Поскольку процесс торможения, в принципе, может происходить обратно процессу пуска, здесь также имеется несколько возможностей. Обратно подробно описанному пуску сначала останавливают ткацкий станок, а вслед за ним зевообразовательный механизм. Возможна, однако, и одновременная остановка. Для этого двигатель 8 запитывают так, что он выработанным им крутящим моментом создает разность частот вращения между 8.11 или валом 8.1 ткацкого станка, с одной стороны, и 8.12, с другой стороны, в 0 рад/с, т.е. 8.11 и 8.12 “притягивают” друг друга. Одновременно двигатели 8А, 8В запитывают так, что они своим соответственно выработанным крутящим моментом поддерживают процесс торможения ткацкого станка (двигатель 8В) и зевообразовательного механизма (двигатель 8А). Это значит, что двигатели 8А, 8В действуют теперь точно так же, как двигатель 5А на фиг.5, когда он, действуя прежде в текущем режиме в качестве муфты, останавливает ткацкий станок. Поскольку при такой остановке ткацкого станка на фиг.5 у машин с малыми потерями происходит возрастание частоты вращения зевообразовательного механизма, здесь у машин с малыми потерями при остановке ткацкого станка повышается частота вращения 8.10, а при остановке зевообразовательного механизма - частота вращения 8.18. При остановке ткацкого станка срабатывает тормоз 8.19, а при остановке зевообразовательного механизма - тормоз 8.20. После остановки ткацкого станка или зевообразовательного механизма соответственно 8.10 или 8.18 может, конечно, вращаться по инерции или соответственно через 8А или 8В может быть медленно остановлена с соответственно малой рекуперативной мощностью.
Двигатели и приданные им исполнительные звенья должны отданную рабочими машинами энергию преобразовывать либо через тормозные резисторы в потери тепла, либо обеспечивать генераторный режим, т.е. полезное торможение, т.е. предпочтительно возвращать в сеть электроснабжения и/или на конденсаторы и/или энергоаккумуляторы других видов.
При выполнении тормоза 8.20 следует еще учесть, что он является, правда, удерживающим тормозом, однако при этом должен обладать таким большим удерживающим моментом, чтобы обеспечивать остановку компонента 8.12 и всех соединенных с ним с геометрическим замыканием компонентов против моментов ускорения или замедления, действующих во время разгона и процесса повторной остановки компонентов 8.17 и 8.18.
При выполнении тормоза 8.19 следует еще учесть, что он является, правда, удерживающим тормозом, однако при этом должен обладать таким большим удерживающим моментом, чтобы обеспечивать остановку компонента 8.7 и всех соединенных с ним с геометрическим замыканием компонентов против моментов ускорения или замедления, действующих во время разгона и процесса повторной остановки компонентов 8.9 и 8.10, а также в зависимости от режима работы компонентов 8.12-8.16 и 8.12-8.18.
В принципе следует указать на то, что придание ткацкого станка и зевообразовательного механизма системе привода может быть также точно обратным, т.е. 8.1 является приводным валом зевообразовательного механизма, тогда как 8.15 является главным приводным валом ткацкого станка. Компоненты 8.2-8.5 были бы связаны тогда соответственно с 8.15, тогда как передаточные средства зевообразовательного механизма были бы связаны с 8.1.
Перечень ссылочных позиций
1 - приводной двигатель
1.1 - тормоз
1.2 - статор
1.3 - ротор
1.4 - муфта
1.5 - маховая масса
1.6 - зубчатое колесо
1.7 - зубчатое колесо
1.8 - главный приводной вал
1.9 - зубчатое колесо
1.10 - зубчатое колесо
1.11 - маховая масса
2 - приводной двигатель
2.1 - тормоз
2.2 - статор
2.3 - ротор
2.4 - муфта
2.5 - маховая масса
2.6 - зубчатое колесо
2.7 - зубчатое колесо
2.8 - приводной вал
3.1 - маховая масса
3.2 - маховая масса
3.3 - вал
4 - двигатель
4.1 - вал
4.2 - полумуфта
4.3 - полумуфта
4.4 - маховая масса
5 - двигатель (частичный привод)
5А - двигатель (частичный привод)
5.1 - статор
5.2 - ротор
5.3 - муфта
5.4 - маховая масса
5.5 - зубчатое колесо
5.6 - зубчатое колесо
5.7 - главный приводной вал
5.8 - зубчатое колесо
5.9 - зубчатое колесо
5.10 - муфта
5.11 - вал
5.12 - ротор/статор
5.13 - статор/ротор
5.14 - маховая масса
5.15 - зубчатое колесо
5.16 - зубчатое колесо
5.17 - приводной вал
5.18 - тормоз
5.19 - тормоз
6 - двигатель (частичный привод)
6А - двигатель (частичный привод)
6.1 - вал
6.2 - статор
6.3 - ротор
6.4 - зубчатое колесо
6.5 - маховая масса
6.6 - муфта
6.7 - главный приводной вал
6.8 - зубчатое колесо
6.9 - зубчатое колесо
6.10 - зубчатое колесо
6.11 - зубчатое колесо
6.12 - муфта
6.13 - вал
6.14 - ротор
6.15 - статор
6.16 - маховая масса
6.17 - зубчатое колесо
6.18 - тормоз
6.19 - приводной вал
6.20 - зубчатое колесо
6.21 - зубчатое колесо
7 - двигатель (привод)
7.1 - зубчатое колесо
7.2 - зубчатое колесо
7.3 - вал
7.4 - ротор/статор линейного двигателя
7.4' - стрелка
7.5 - статор/ротор линейного двигателя
7.6 - вращательная деталь
7.7 - зубчатое колесо
7.8 - зубчатое колесо
7.9 - вращательная деталь
7.10 - вал
7.11 - подшипник
7.12 - вал
8 - двигатель (частичный привод)
8А - двигатель (частичный привод)
8В - двигатель (частичный привод)
8.1 - главный приводной вал
8.2 - зубчатое колесо
8.3 - зубчатое колесо
8.4 - зубчатое колесо
8.5 - зубчатое колесо
8.6 - муфта
8.7 - вал
8.8 - статор
8.9 - ротор
8.10 - маховая масса
8.11 - статор
8.12 - ротор
8.13 - зубчатое колесо
8.14 - зубчатое колесо
8.15 - приводной вал
8.16 - статор
8.17 - ротор
8.18 - маховая масса
8.19 - тормоз
8.20 - тормоз
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПАКТНОЕ ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ САМОХОДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2714042C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТКАЦКОГО СТАНКА С ЗЕВООБРАЗОВАТЕЛЬНЫМ МЕХАНИЗМОМ | 2001 |
|
RU2247178C1 |
| Основный регулятор ткацкого станка | 1988 |
|
SU1516537A1 |
| КОМПАКТНОЕ ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ САМОДВИЖУЩИХСЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2733308C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ПРИВОДНОГО УСТРОЙСТВА ТКАЦКОГО СТАНКА И ЗЕВООБРАЗУЮЩЕГО МЕХАНИЗМА С ОТДЕЛЬНЫМ ПРИВОДНЫМ МЕХАНИЗМОМ | 2003 |
|
RU2274687C1 |
| Товарный регулятор ткацкого станка | 1989 |
|
SU1654389A1 |
| СИЛОВОЙ АГРЕГАТ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2221161C2 |
| ЭЛЕКТРОМОБИЛЬ | 1989 |
|
RU2022818C1 |
| Приводное устройство для ткацкого станка | 1972 |
|
SU499817A3 |
| ПРИВОД | 1999 |
|
RU2238193C2 |

Изобретение относится к области средств синхронизации работы приводов ткацкого станка и зевообразовательного устройства и компенсации колебаний частоты их вращения и касается приводного устройства для ткацкого станка и зевообразовательного механизма, содержащего средства для компенсации колебаний частоты вращения привода ткацкого станка и зевообразовательного механизма, причем ткацкий станок содержит электропривод, соединенный с его главным приводным валом непосредственно или через передаточные средства, зевообразовательный механизм содержит электропривод, соединенный с его приводным валом непосредственно или через передаточные средства, по меньшей мере, ткацкий станок содержит средства для торможения главного приводного вала, с приводом ткацкого станка и зевообразовательного механизма с возможностью передачи сигналов соединено устройство управления, содержащее средства регулирования для работы соответственно одного вышеназванного привода выборочно в зависимости от соответственно другого вышеназванного привода. Средства компенсации состоят, по меньшей мере, из одной частичной маховой массы, действующей на главный приводной вал ткацкого станка и, по меньшей мере, одной частичной маховой массы, действующей на приводной вал зевообразовательного механизма. Данное устройство имеет повышенную надежность в работе. 2 н. и 47 з.п. ф-лы, 7 ил.
а) ткацкий станок содержит электропривод, соединенный с его главным приводным валом непосредственно или через передаточные средства;
б) зевообразовательный механизм содержит электропривод, соединенный с его приводным валом непосредственно или через передаточные средства;
в) по меньшей мере, ткацкий станок содержит средства для торможения главного приводного вала;
г) с приводом ткацкого станка и зевообразовательного механизма с возможностью передачи сигналов соединено устройство управления;
д) устройство управления содержит средства регулирования для работы соответственно одного вышеназванного привода выборочно в зависимости от соответственно другого вышеназванного привода,
отличающееся тем, что средства компенсации состоят, по меньшей мере, из одной частичной маховой массы (1.5, 1.11; 5.4, 5.14; 6.5, 6.16; 8.10, 8.18), действующей на главный приводной вал (1.8; 5.7; 6.7; 8.1) ткацкого станка, и, по меньшей мере, одной частичной маховой массы (2.5; 5.14; 6.5; 6.16; 8.10; 8.18), действующей на приводной вал (2.8; 5.17; 6.19; 8.15) зевообразовательного механизма, или предусмотрены передаточные средства, которые заставляют действовать на приводной вал (5.17; 6.19; 8.15) зевообразовательного механизма момент инерции масс, по меньшей мере, одной инерционной массы, вращающейся вместе с электроприводом (5,5А; 6,6А; 8,8А, 8В) главного приводного вала ткацкого станка; привод ткацкого станка состоит из нескольких, действующих на главный приводной вал (5.7; 6.7; 8.1) частичных электроприводов (5, 5А; 6, 6А; 8, 8А, 8В), привод зевообразовательного механизма является, по меньшей мере, одним из действующих на главный приводной вал (5.7; 6.7; 8.1) частичных электроприводов (5, 5А; 6, 6А; 8, 8А, 8В), который, по меньшей мере, через передаточные средства, а также в случае работы привода (8В) через действующий в качестве бесконтактной муфты привод (8) взаимодействует с приводным валом зевообразовательного механизма; средства торможения являются, предпочтительно, встроенными в частичные приводы первыми тормозными средствами, которые приводят к остановке ткацкий станок и зевообразовательный механизм; главному приводному валу ткацкого станка приданы вторые тормозные средства (1.1; 4.5; 5.18; 6.18; 8.19); приводному валу зевообразовательного механизма приданы третьи тормозные средства (2.1; 5.19; 6.22; 8.20), при этом все частичные электроприводы (1; 2, 5, 5А; 6, 6А; 8, 8А, 8В) соединены с устройством управления с возможностью передачи сигналов.
| ЕР 1048769 А, 02.11.2000 | |||
| US 5642757 А, 01.07.1997 | |||
| Дисковая рубительная машина | 1977 |
|
SU893525A1 |
| Регенеративный вращающийся воздухоподогреватель | 1980 |
|
SU1000678A1 |
| Механизм отыскания "раза" на бесчелночном ткацком станке | 1987 |
|
SU1576601A1 |

