I
Изобретение относится к приборостроению и может быть использовано для управления шаговым вибродвигателем в цифровых системах автоматики.
Известно устройство для управления шаговым вибродвигателем, содержащее два идентичных пьезоэлемента с натягом, прижатых к рЪтору и подключенных к генератору переменного напряжения, фазовращателю и ключу, датчик скорости, через усилительформирователь подсоединенный к генератору ступенчатообразного напряжения, счетчику и запускающему входу, формирователя импульсов, управляющий вход которого подсоединен к генератору ступенчатообразного напряжения, а выход через схему И-НЕ соединен со входом установки нуля триггера. Выход последнего через клюм подключен к генератору переменного напряжения и фазовращателю, соединенным с блоком управления, который также соединен с входом сброса генератора ступеичатообразного напряжения, с входом сброса счетчика, входом установки единицы триггера и дешифратором, вход которого соединен с выходом счетчика, а выход подключен ко второму выходу схемы И-НЕ 1.
Недостаток данного устройства в том,-что оно не обеспечивает цифрового управления шаговым вибродвигателем в системах автоматического регулирования.
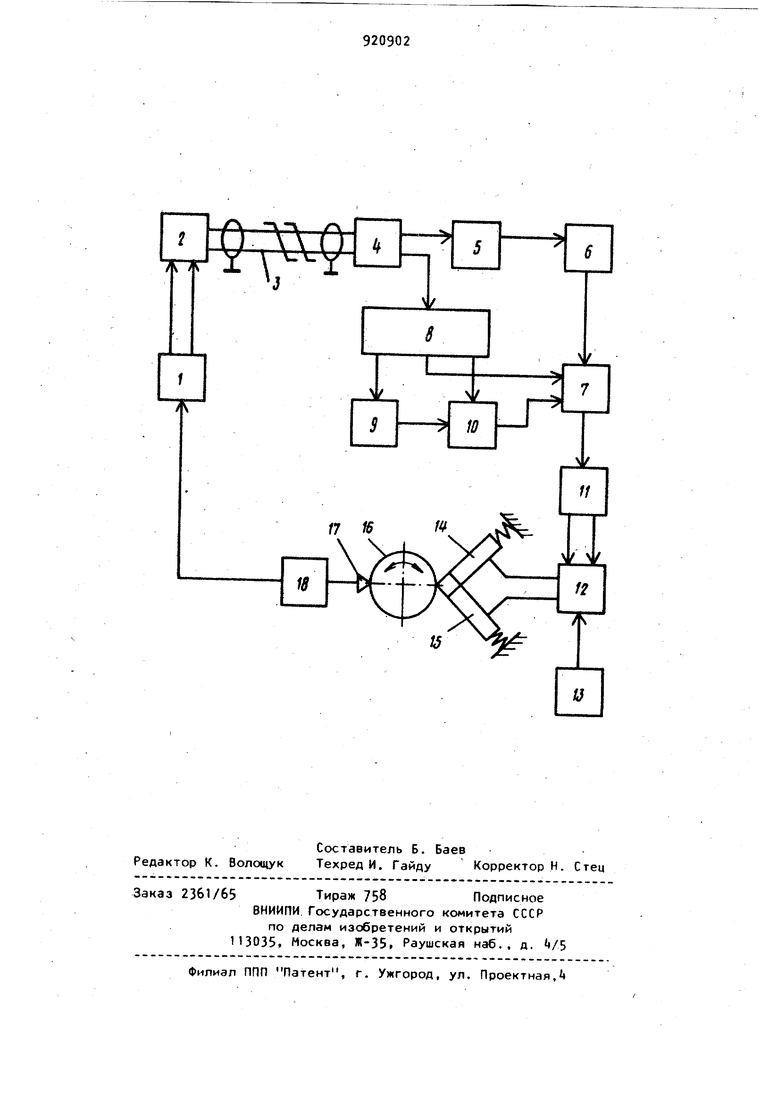
Известно также устройство для управления шаговым вибродвигателем, состоящим из ротора и сопряженного с ним движителя в виде двух пьезоэлементов, установленных под углом один к другому, содержащее генератор переменного напряжения, коммутатор, датчик углового положения, усилитель-формирователь, счетчик, регистр числа и дешифратор, причем генератор через коммутатор подключей к обкладкам пьезоэлементов, а датчик углового положения подключен к усилителю-формирователю. Кроме того, устройство содержит и ряд других элементов, в частности два вентиля, триггер, схему ИЛИ, блок сравнения и т.д. 2L Однако известное устройство не обеспечивает цифрового управления угловым положением ротора, поэтому двигатель не может работать в систе мах автоматического регулирования,в состав которых входят ЭВМ, что сужает область применения вибродвигателя. Цель изобретения - расширение области применения вибродвигателя путем обеспечения возможности цифрового управления угловым положением ротора. Поставленная цель достигается тем, что устройство для управления шаговым вибродвигателем, состоящим из ротора и сопряженного с ним движителя в виде двух пьезоэлементов, установленных под углом один к другому, содержащее генератор переменного напряжения, коммутатор, датчик углового положения, усилительформирователь, счетчик, регистр числа и дешифратор, причем генератор через коммутатор подключен к обкладкам пьезоэлементов, а датчик углового положения подключен к усилителю-формирователю ,оно дополнительно содержит цифровой блок управ ления, формирователь последовательного кода, линию связи, преобразователь кода, блок формирования окон чания слова, блок селекции адреса, блок селекции хода и управляемый генератор, при этом усилитель-формирователь подключен к входу блока управления, выход блока управления подключен к формирователю последовательного кода, который через линию связи подключен к преобразователю кода, преобразователь кода по соединен параллельно к блоку форми рования окончания слова и регистру числа, выход последнего соединен параллельно с блоком селекции адре блоком селекции хода и счетчиком, второму входу которого через управ ляемый генератор подключён формиро ватель окончания слова, а к входу записи счетчика через блок селекци хода подключен блок селекции адре4а, причем выход счетчика через ешифратор подключен к коммутатору. На чертеже представлена структурная схема устройства. Цифровой блок управления 1 подключен к формирователю последовательного кода 2, выход которого через инию связи 3 подключен к преобразователю кода . Выход преобразователя кода k через последовательно соединенные формирователь окончания слова 5 и управляемый генератор 6 подключен к одному входу счетчика 7 и Ч(грез регистр числа, 8 к блоку селекции адреса 9 блоку селекции хода 10 и второму входу счетчика 7. К входу записи счетчика 7 подключен выход блока селекции хода Ю, а к блоку 10 подключен выход блока селекции адреса 9- Выход счетчика 7 через дешифратор 11 подключен к коммутатору 12, через который выход генератора переменного напряжения 13 подключен к обкладкам двух пьезоэлементов и 15, установленных под углом один к другому и сопряженных с ротором 16. Датчик 17 углового положения ротора через усилительформирователь 18 подключен к цифровому блоку управления 1 . Устройство работает следующим образом. При включении устройства цифровой блок управления 1, например электронная цифровая вычислительная машина (ЭЦВМ),вырабатывает закодированную команду, которая в формирователе последовательного кода 2 формируется в помехозащищенный последовательный биполярный код, который по двухпроводной бифилярной линий 3 передается к преобразователю t биполярного последовательного кода в однополярный последовательный код. С преобразователем сигнал подается и записывается в регистр числа 8, в котором записывается также значение адреса передачи команды и значение величины и направление поворота ротора 16. К выходу регистра 8 подключены блоки селекции адреса 9 и селекции направления хода или вращения ротора 10 и счетчик 7, в котором регистрируется в параллельном коде значение количества шагов поворота ротора. К другому входу счетчика 7 подается сигнал с управляемого генератора 6, который вырабатывает команды считывания значения количества шагов в виде последова-г тельности импульсов. Управляемый генератор 6 запускается сигналом формирователя окончания слова 5 сопряженного с преобразователем кода k. При поступлении тактовых сигналов, количество, которых со ответствует количеству шагов у лового поворота ротора 16, с уп равляемого генератора 6 в счетчик 7 производится преобразование параллельного кода в последовательный код, который через дешифратор 11 управляет электронным коммутатором 12, и с генератора 13 переменного напряжения к соответствующим обкладкам пьезоэлементов l4 и 15 поступает высокочастотный сигнал питания. Длительность сигнала дешифратора 11 соответствует длительности шага поворота ротора 16. При подключении сигнала питания с генератора 13 к обкладкам пьезоэлемента Tt ротор 16 вращается по часовой стрелке, так как пьезоэлемент 1 совершает высокочастотные продол ные колебания и посредством силы сухого трения сообщает ротору момен вращен1 я. При подключении сигнала п тания к пьезоэлементу 15 ротор 16 вращается против часовой стрелки. Сигнал обратной связи с датчика 17 углового положения ротора 16 через усилитель-формирователь 18 поступае к цифровому блоку управления 1 , в котором Производится сопоставление действительного положения ротора 16 с заданным положением и вырабатьдаа.ется команда корректировки углового положения ротора. С осью ротора механически связан любой исполнительный механизм системы автоматического регулирования, например золотник гидравлической системы управлени механизмами крыла самолета. Экспериментальные исследования макета устройства показапи возможность его использования в цифровых системах управления положения исполнительных механизмов. При этом также повышается быстродействие и надёжность, уменьшаются габариты и вес устройства в 1,5-2 раза по сравнению с известным. 026 Формула изобретения Устройство для управления шаговым вибродвигателем, состоящим из ротора и сопряженного с ним движителя в виде двух пьезоэлементов, установленных под углом один к другому,содержащее генератор переменного напряжения, коммутатор, датчик углового положения, усилитель-формирователь, счетчик, регистр числа,и дешифратор, причем генератор через коммутатор подключен к обкладкам пьезоэлементов, а датчик углового положения подключен к усилителю-формирователю, отлич-ающееся тем, что, с целью расширения области применения вибродвигателя путем обеспечения возможности цифрового управления угловым положением ротора,оно дополнительно содержит цифровой блок управления, формирователь последовательного кода, линию связи, преобразователь кода, блок формирования окончания слова, блок селекции адреса, блок селекции хода и управляемый генератор, при этим усилитель-формирователь подключен к входу блока управления, выход блока управления подключен к формирователю последовательного кода, крторый через линию связи подключен к преобразователю кода, преобразователь кода подсоединен параллельно к блоку формирования окфнчания слова и регистру числа, выход последнего соединен паралгГельно с блоком селекции адреса, блоком селекции хода и счетчиком. К второму входу которого через управляемый генератор подключен формирователь окончания слова, а к входу записи счетчика через блок селекции хода подключен блок селекции адреса, причем выход счетчика через дешифратор подключен к коммутатору. Источники информации, ринятые во внимание при экспертизе 1.Авторское свидетельство СССР о заявке №2679767/18-10, л. Н 01 L Vl/10, 1378. 2.Авторское свидетельство СССР о заявке tP 27 3323/18-25, л. Н 01 L il/IO, 1979 (прототип). /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ша-гОВыМ ВибРОдВигАТЕлЕМ | 1979 |
|
SU801151A1 |
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
| Привод | 1978 |
|
SU777712A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для регистрации цифровой информации | 1986 |
|
SU1386915A2 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Устройство для управления шаговым двигателем | 1981 |
|
SU1004978A1 |
| Устройство для обучения | 1987 |
|
SU1559366A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |