1
Изобретение относится к землеройным машинам, а именно к их гидроприводам.
Целью изобретения является упрощение конструкции и повышение надежности работы экскаватора.
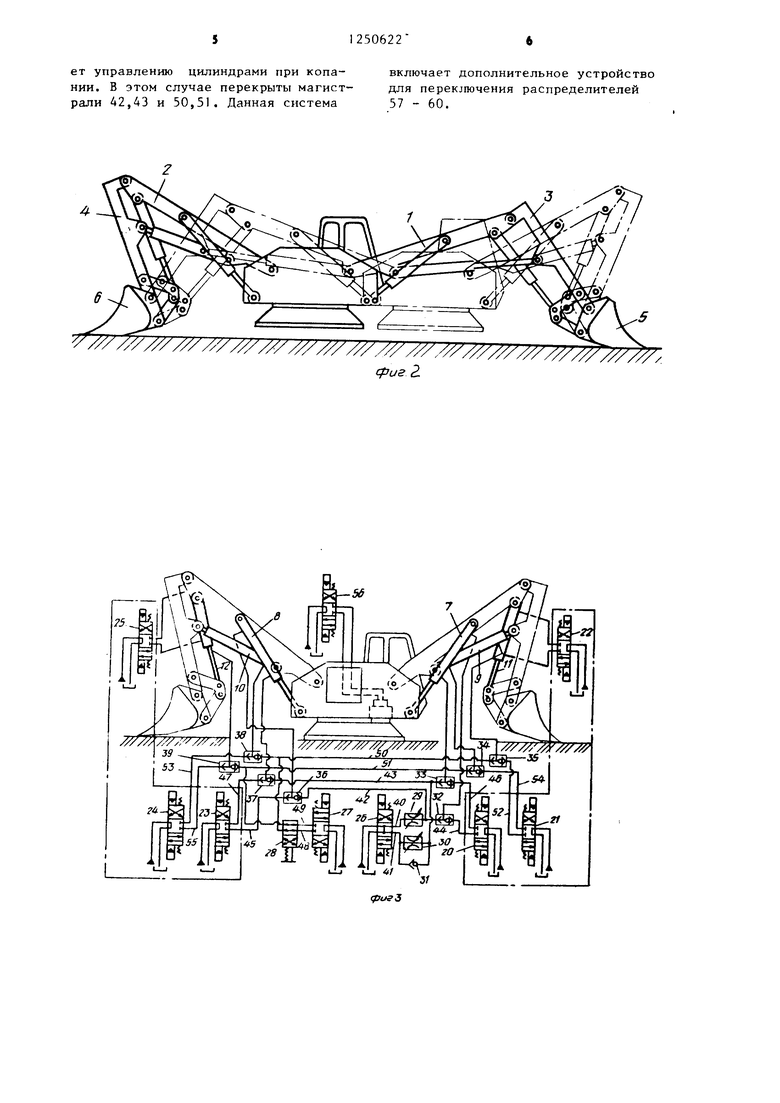
На фиг. 1 изображен экскаватор с рабочим оборудованием прямого копания, общий вид; на фиг.2 - то же, при передвижении своим ходом; на фиг,3 - гидравлическая схема экскаватора; на фиг,4 - то же, другой вариант выполнения; на фиг о 5 - экскаватор с рабочим оборудованием (обратная лопата),
Самоходный гидравлический экскаватор включает два экскаваторных оборудования (), содержащих стрелы 1 и 2, рукояти 3 и Д, рабочие органы - ковши 5 и 6, Экскаваторное об- рудование имеет силовые цилиндры; 7 и 8 - поворота стрел, 9 и 10 - поворота рукоятей, 11 и 12 поворота ковшей, Нижние KOHnj i стрел и цилиндров 7 и 8 шарнирно укреплены на поворотной платформе 13, смонтированной на несущей раме 14, имеющей основание 15 в виде плиты для опира- ния на грунт. Рама 14 связана с поворотной платформой 13 опорно поворотным устройством 16с На поворотной платформе смонтированы также кабина машиниста I 7 с пультом управления экскаватором, поворотный механизм I8 и привод экскаватора с насосной установкой 19.
Для управления силовыми цилиндрами переднего рабочего оборудования (на фиг„1 справа) при копании предусмотрены распределители 20 - 22 (фиГсЗ), а для заднего рабочего оборудования - распределители 23 - 25
Для обеспечения согласованного управления силовыми цилиндрами обеих стрел и рукояткой при передвижении экскаватора своим ходом предусмотрены дополнительные трехпозиционные распределители 26 и 27, дополнительный двухпозиционный распределитель 28, регулируемые дроссели 29 и 30 с обратным клапаном 31 и две группы клапанов ИЛИ (всего восемь клапанов 32 - 39).
Дополнительные й спределители 26 и 27 установлены параллельно основным распределителям 20, 23 и 21, 24 управления силовыми цилиндрами стрел и рукоятей„
506222
Рабочие отводы 40 и 41 распределителя 26 через дроссели 29 и 30 с обратным клапаном 31 присоединены к магистралям 42 и 43, соединяющим 5 между собой попарно с помощью клапанов ИЛИ 32, 36 и 37 на их концах одноименные полости цилиндров 7 и 8 стрел„ Противоположные подводы клапанов 32 и 36 соединены соответст 0 венно с рабочими отводами 44 и 45 основных распределителей 20 и 23 управления силовыми цилиндрами стрел, а противоположные отводы клапанов 33 и 37 - с рабочими отводами 46
5 и 47 этих же распределителей стрел Рабочие отводы 48 и 49 дополнительного распределителя 27 через распределитель 28 присоединены соответственно к магистралям 50 и
20 51 (или 51-50 при переключении распределителя 28 вверх), соединяющим между собой попарно с помощью клапанов ИЛИ 35, 38 и 34 на их концах разноименные полости цилинд25 ров 9 и 10 рукоятей. Противоположные отводы клапанов 35 и 38 соединены соответственно с рабочими отводами 52 и 53 основных распределителей 21 и 24 управления цилинд- 30 рами рукоятей, а противоположные
подводы клапанов 34 и 39 - с рабочими отводами 54 и 55 этих же распределителей рукоятей.
Распределитель 56 предназначен
JJ для управления гидромотором 18 (фиг„1) вращения поворотной платформы экскаватора. Во втором исполнении система имеет распределители 57 - 60, выполняющие функцию
40 клапаном ИЛИ.
Рабочий процесс экскаватора сос- тоит из операций копания, поворота платформы и передвижения экскаватора своим ходом.
45
Операции копания и поворота осуществляются с помощью известных устройств и способов Управление при этом осуществляется посредством .- указанных распределителей 20 - 25 и 56.
Передвижение экскаватора своим ходом осуществляется способом шагания за счет согласованных поворотов 55 стрел и рукоятей рабочих оборудований Управление работой силовых цилиндров стрел и рукоятей при этом производится посредством указанных
двух дополнительных трехпозиционных распределителей 26 и 27 (фиг.З),
При нейтральном положении золотников этих распределителей рабочая жидкость от насосной установки сливается в бак.
При включении распределителя 26 вверх рабочая жидкость от насосной установки через магистраль 40 и дроссель 29 поступает в магистраль 42, соединяющую между собой подводы клапанов ИЛИ 32 и 36, где перекрыв соответственно магистрали 44 и 45 п отводам указанных клапанов одновременно поступает в поршневые полости цилиндров 7 и 8. Этим самым осуществляется одновременный подъем обоих рабочих оборудований. Дросселем 29 регулируется скорость подъема.
Одновременно распределитель 27 включается вниз, при этом рабочая жидкость от насосной установки через магистраль 49, распределитель 2 поступает в магистраль 51, соединяющую между собой подводы клапанов ИЛИ 34 и 39, где перекрыв соответственно магистрали 54 и 55, по отводам клапанов 34 и 39 одновременно поступает в поршневую полость цилиндра 9 и штоковую полость цилиндра 10. Этим самым осуществляется одновременный поворот рукоятей 3 и 4 (фиГо и 2) против часовой стрелки и перемещение ковшей 5 и 6 слева направо.
Затем распределители 26 и 27 переводятся в нейтральное положение, при этом рабочая жидкость из поршневых полостей цилиндров 7 и 8 сливается через дроссель 29, что обеспечивает плавное опускание рабочих оборудований до упора ковшами в грунт Одновременно штоковые полост этих цилиндров заполняются рабочей жидкостью через обратный клапан 31,
После этого распределитель 26 включается вниз и рабочая жидкость поступает в штоковые полости цилиндров 7 и 8 через магистраль 41, обратный клапан 31, магистраль 43 и клапаны ИЛИ 33 и 37. При этом происходит подьем поворотной платформы 13 (фиг„2). Слив рабочей жидкости из поршневых полостей цилиндров 7 и 8 в этом случае происходит через клапаны 32 и 36, магистраль 29 и сливной канал распределителя 26,
Одновременно распределитель 27 включается вверх и рабочая жидкость
2506224
через магистраль 48, распределитель реверса 28 поступает в магистраль 50, соединяющую между,собой подводы клапанов ИЛИ 35 и 38, где перекрыв
5 соответственно магистрали 52 и 53, по отводам этих клапанов поступает одновременно в штоковую полость цилиндра 9 и поршневую полость цилиндра 10, Вследствие этого происхо10 дит одновременный поворот рукоятей 3 и 4 по часовой стрелке и перемещение тем самым поворотной платформы слева направо (фиг.2). Слив рабочей жидкости при этом из противо)5 положных полостей этих цилиндров происходит через клапаны 34 и 39, магистраль 51, распределитель 28, магистраль 49 в сливной канал распределитель 27.
2Q Затем распределители 26 и 27
вновь переводятся в нейтральное положение и поворотная платформа при этом плавно опускается на грунт. На этом заканчивается один цикл шага25 ния. Последующие циклы осуществляются аналогично описанному.
Для изменения направления передвижения на обратное (справа налево) двухпозиционный распределитель 3Q 28 переводится в верхнее положение. Последовательность включения распределителей 26 и 27 после этого остается неизменной.
Указанный способ изменения направления передвижения необходим лишь в стесненном рабочем простран- стве. В нормальных условиях изменение направления перемещения на любой угол осуществляется путем поворота платформы в нужном направлении включением распределителя 56.
В гидравлической схеме по фиг,4 магистрали 42,43 и 50,51 (фиг,3,4), соединенные с дополнительными распределителями 26 и 27, а также с соответствующими магистралями основных распределителей 20,23 и 21, 24, присоединены к соответствующим подводам цилиндров 7,8 и 9,10 посредством четырех двухпозиционных 50 распределителей 57,58 и 59,60,
Одна позиция этих распределителей на (фиг.4) соответствует управлению указанными цилиндрами при передвижении экскаватора. Магистрали 55 основных распределителей при этом перекрыты.
Другая позиция (фиг,4) при переключении справо налево соответству35
40
45
ет управлению цилиндрами при копании. В этом случае перекрыты магистрали 42,43 и 50,51. Данная система
включает дополнительное устройство для переключения распределителей 57 - 60.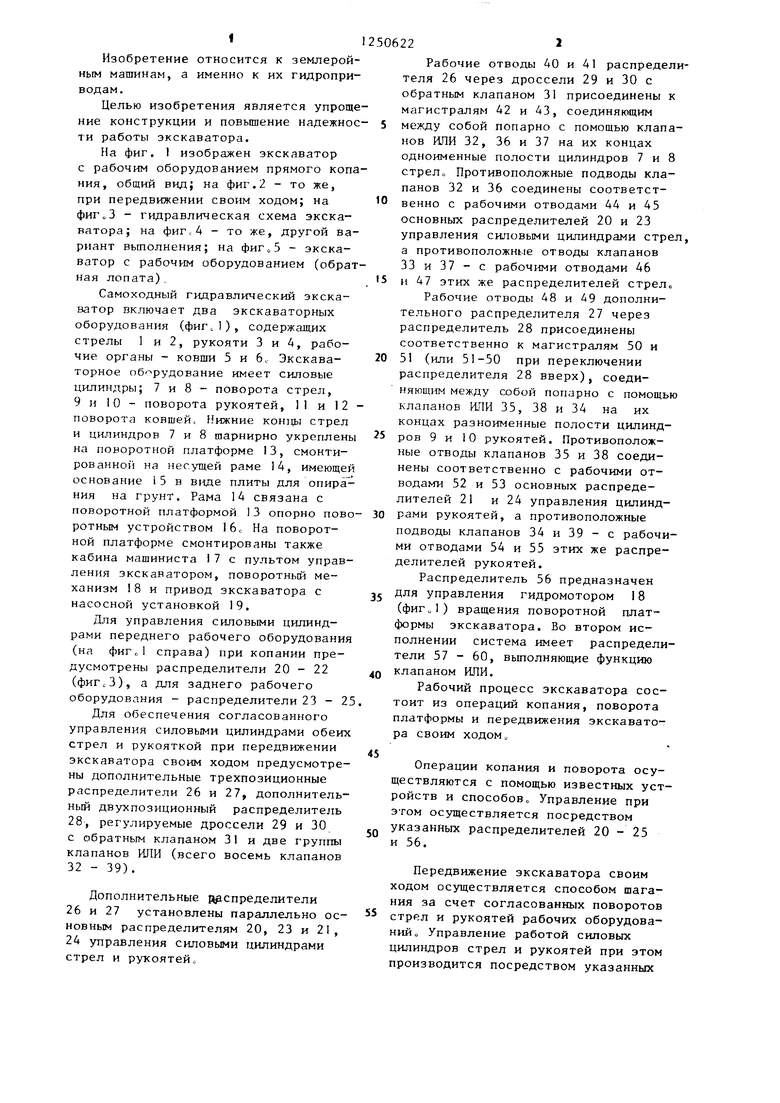

| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Система управления рабочим процессом гидравлического экскаватора | 1985 |
|
SU1315572A1 |
| Двухпоточный гидропривод экскаватора | 1979 |
|
SU891869A1 |
| Рабочее оборудование экскаватора | 1985 |
|
SU1294924A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидропривод одноковшового экскаватора | 1974 |
|
SU549551A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Гидропривод одноковшовного экскаватора | 1974 |
|
SU541946A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| ГИДРОПРИВОД одноковшового ЭКСКАВАТОРА | 1971 |
|
SU307165A1 |


сриг 2.
//// //////////////////////// //////// / /
сриг 5
Редактор М.Недолуженко
Заказ 4381/23
Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная,4
Составитель С.Фомин Техред Э.Чижмар
Корректор А.Обручар
| Патент США № 3606048, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
