13иире емие относится к экскаваторо- строению, точнее к гидравлическим экскаваторам.
Цель изобретения - упрощение управления экскаватором, повышение качества работы производительности при производстве зачистных и планировочных операций при обеспечении движения ковша по прямолинейным траекториям, пересекающимся в фиксированной точке в зоне опорного контура механизма передвижения и положения хасательной силы сопротивления грунта копанию, направленной в эту же зону.
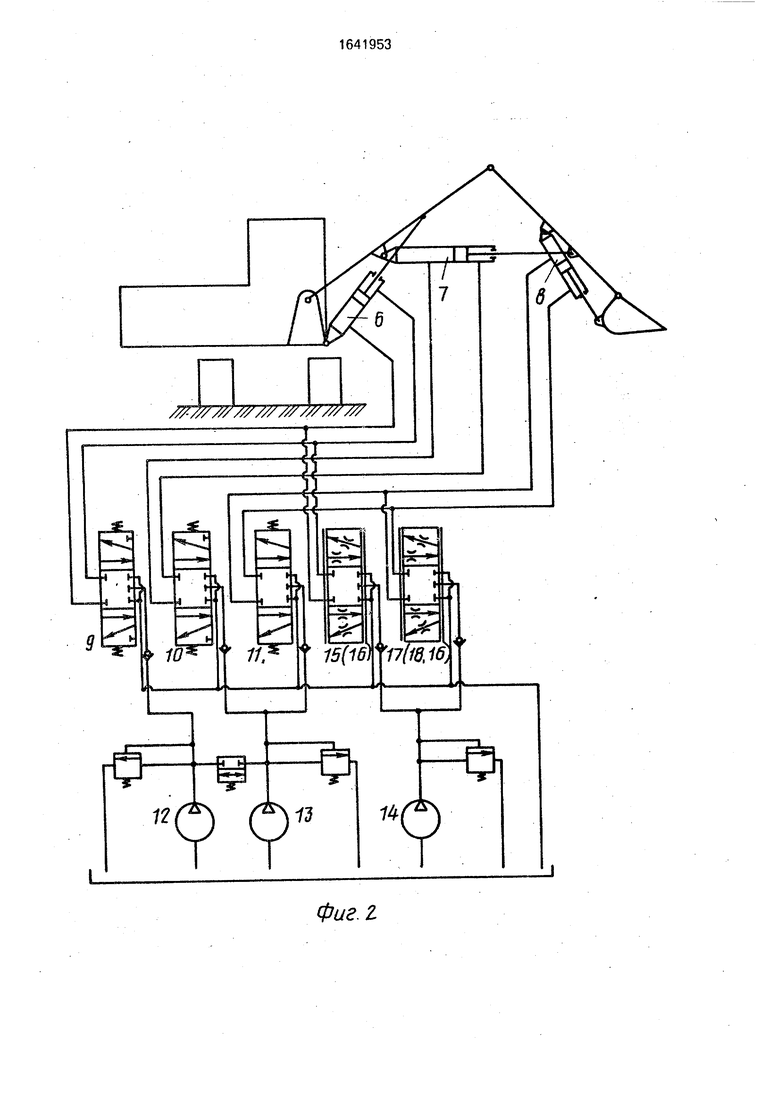
Нафиг.1 показан гидравлический экскаватор, оборудованный устройством автоматического копания, на фиг.2 гидравлическая схема привода рабочего
оборудования; на фиг.З и 4 - варианты схем кулисно-рычажного механизма следящего привода с гидравлическими передатчиками угловых перемещений; на фиг,5 - схема безнасосной гидравлической пары передатчиков угловых перемещений; на фиг.6 - схема взаимосвязи рычага-задатчика угла копания со звеном-хранителем его исходного положения; на фиг.7 - сечение А-А на фиг.6; на фиг.8 - следящий привод стабилизаторов траектории и угла копания с гидромеханическими механизмами угловых перемещений; на фиг.9 - стабилизатор траектории копания с кулачковым толкателем; на фиг. 10- схема включения кулачка в режиме автоматического управления; на фиг.11 - стабилизатор угла копания с винтовым толкателем; на фиг.12 - стабилизатор угла копания с дифференциальным толкателем.
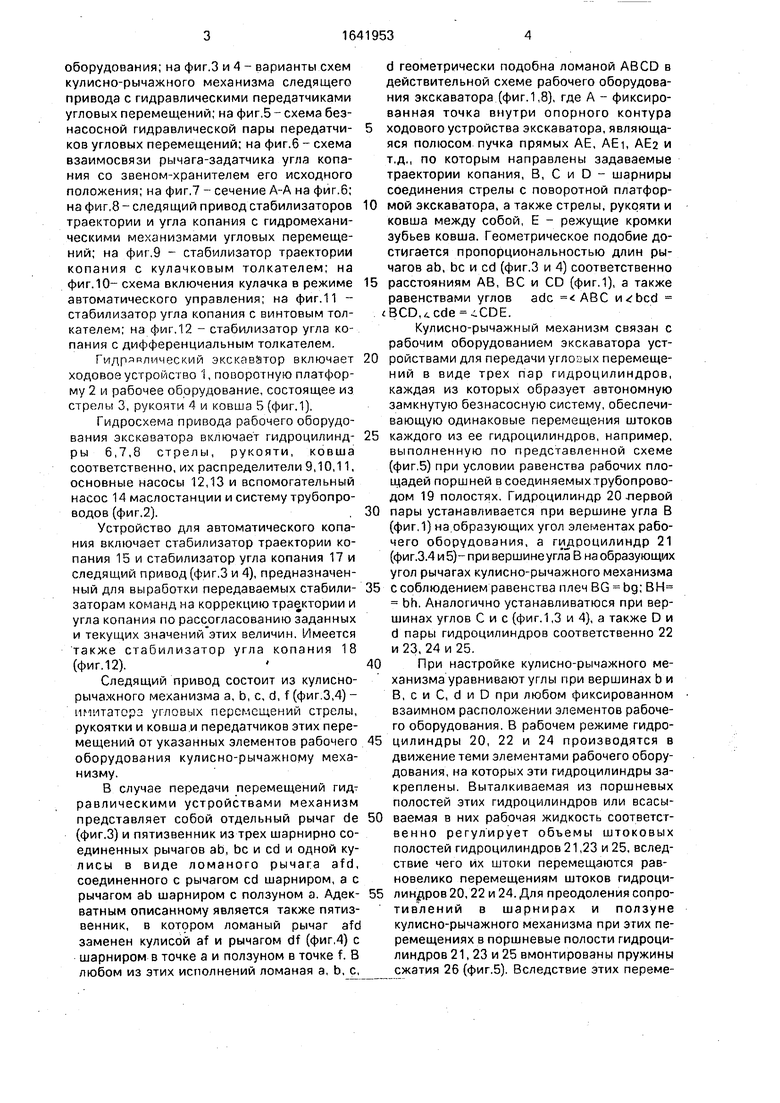
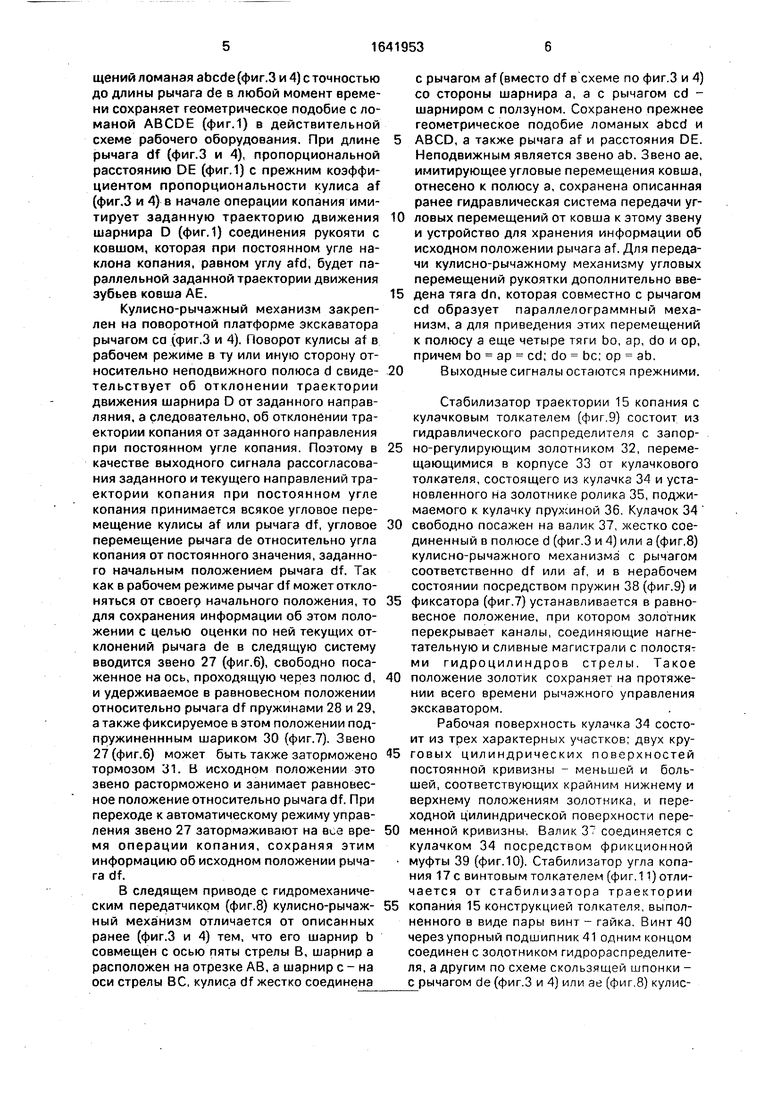
Гидравлический экскаватор включает ходовое устройство 1, поворотную платформу 2 и рабочее оборудование, состоящее из стрелы 3, рукояти 4 и ковша 5 (фиг.1).
Гидросхема привода рабочего оборудования экскаватора включает гидроцилиндры 6,7,8 стрелы, рукояти, ковша соответственно, их распределители 9,10,11, основные насосы 12,13 и вспомогательный насос 14 маслостанции и систему трубопроводов (фиг.2).
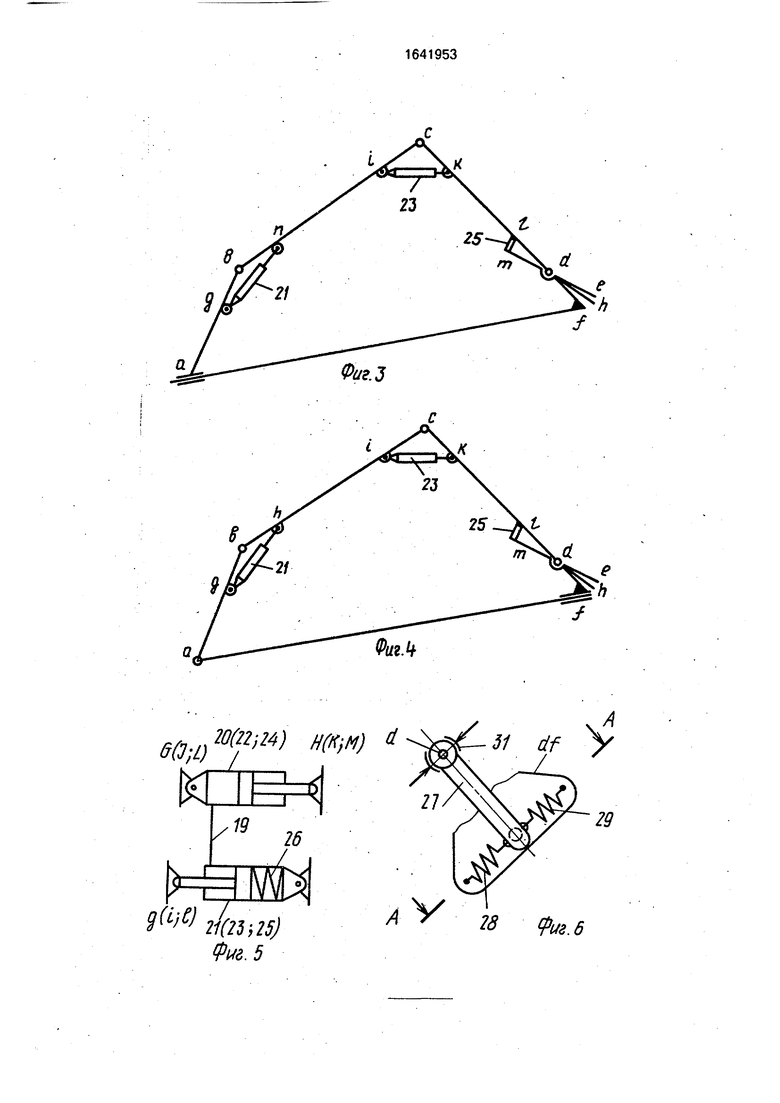
Устройство для автоматического копания включает стабилизатор траектории копания 15 и стабилизатор угла копания 17 и следящий привод (фиг.З и 4), предназначенный для выработки передаваемых стабилизаторам команд на коррекцию траектории и угла копания по рассогласованию заданных и текущих значений этих величин. Имеется также стабилизатор угла копания 18 (фиг. 12).
Следящий привод состоит из кулисно- рычажного механизма а, Ь, с, d, f (фиг.3,4) - имитатора угловых перемещений стрелы, рукоятки и ковша и передатчиков этих перемещений от указанных элементов рабочего оборудования кулисно-рычажному механизму.
В случае передачи перемещений гидт равлическими устройствами механизм представляет собой отдельный рычаг de (фиг.З) и пятизвенник из трех шарнирно соединенных рычагов ab, be и cd и одной кулисы в виде ломаного рычага afd, соединенного с рычагом cd шарниром, а с рычагом ab шарниром с ползуном а. Адекватным описанному является также пятизвенник, в котором ломаный рычаг afd заменен кулисой af и рычагом df (фиг,4) с шарниром в точке а и ползуном в точке f. В любом из этих исполнений ломаная а, Ь, с,
d геометрически подобна ломаной ABCD в действительной схеме рабочего оборудования экскаватора (фиг. 1,8), где А - фиксированная точка внутри опорного контура
ходового устройства экскаватора, являющаяся полюсом пучка прямых АЕ, AEi, AE2 и т.д., по которым направлены задаваемые траектории копания, В, С и D - шарниры соединения стрелы с поворотной платфор0 мой экскаватора, а также стрелы, рукояти и ковша между собой, Е - режущие кромки зубьев ковша. Геометрическое подобие достигается пропорциональностью длин рычагов ab, be и cd (фиг.З и 4) соответственно
5 расстояниям АВ, ВС и CD (фиг.1), а также равенствами углов adc ABC и г bed BCD,4Cde .iCDE.
Кулисно-рычажный механизм связан с рабочим оборудованием экскаватора уст0 ройствами для передачи угловых перемеще- ний в виде трех пар гидроцилиндров, каждая из которых образует автономную замкнутую безнасосную систему, обеспечивающую одинаковые перемещения штоков
5 каждого из ее гидроцилиндров, например, выполненную по представленной схеме (фиг.5) при условии равенства рабочих площадей поршней в соединяемых трубопроводом 19 полостях. Гидроцилиндр 20 лервой
0 пары устанавливается при вершине угла В (фиг,1) на образующих угол элементах рабочего оборудования, а гидроцилиндр 21 (фиг.3.4 и 5)- при вершине угла В на образующих угол рычагах кулисно-рычажного механизма
5 с соблюдением равенства плеч BG bg; BH bh. Аналогично устанавливайся при вершинах углов Сие (фиг. 1,3 и 4), а также D и d пары гидроцилиндров соответственно 22 и 23, 24 и 25.
0 При настройке кулисно-рычажного механизма уравнивают углы при вершинах Ь и В, с и С, d и D при любом фиксированном взаимном расположении элементов рабочего оборудования. В рабочем режиме гидро5 цилиндры 20, 22 и 24 производятся в движение теми элементами рабочего оборудования, на которых эти гидроцилиндры закреплены. Выталкиваемая из поршневых полостей этих гидроцилиндров или всасы0 ваемая в них рабочая жидкость соответственно регулирует объемы штоковых полостей гидроцилиндров 21,23 и 25, вследствие чего их штоки перемещаются равновелико перемещениям штоков гидроци5 линдров 20,22 и 24. Для преодоления сопро- тивлений в шарнирах и ползуне кулисно-рычажного механизма при этих перемещениях в поршневые полости гидроцилиндров 21, 23 и 25 вмонтированы пружины сжатия 26 (фиг.5). Вследствие этих перемещений ломаная abcde (фиг.З и 4) с точностью до длины рычага de в любой момент времени сохраняет геометрическое подобие с ломаной ABCDE (фиг.1) в действительной схеме рабочего оборудования. При длине рычага df (фиг.З и 4), пропорциональной расстоянию DE (фиг.1) с прежним коэффициентом пропорциональности кулиса af (фиг.З и 4) в начале операции копания имитирует заданную траекторию движения шарнира D (фиг. 1} соединения рукояти с ковшом, которая при постоянном угле наклона копания, равном углу afd, будет параллельной заданной траектории движения зубьев ковша АЕ.
Кулисно-рычажный механизм закреплен на поворотной платформе экскаватора рычагом со (фиг.З и 4). Поворот кулисы af в рабочем режиме в ту или иную сторону относительно неподвижного полюса d свидетельствует об отклонении траектории движения шарнира D от заданного направ- ляния, а следовательно, об отклонении траектории копания от заданного направления при постоянном угле копания. Поэтому в качестве выходного сигнала рассогласования заданного и текущего направлений траектории копания при постоянном угле копания принимается всякое угловое перемещение кулисы af или рычага df, угловое перемещение рычага de относительно угла копания от постоянного значения, заданного начальным положением рычага df. Так как в рабочем режиме рычаг df может отклоняться от своего начального положения, то для сохранения информации об этом положении с целью оценки по ней текущих отклонений рычага de в следящую систему вводится звено 27 (фиг.б), свободно посаженное на ось, проходящую через полюс d, и удерживаемое в равновесном положении относительно рычага df пружинами 28 и 29, а также фиксируемое в этом положении под- пружиненнным шариком 30 (фиг.7). Звено 27 (фиг.б) может быть также заторможено тормозом 31. В исходном положении это звено расторможено и занимает равновесное положение относительно рычага df. При переходе к автоматическому режиму управления звено 27 затормаживают на время операции копания, сохраняя этим информацию об исходном положении рычага df.
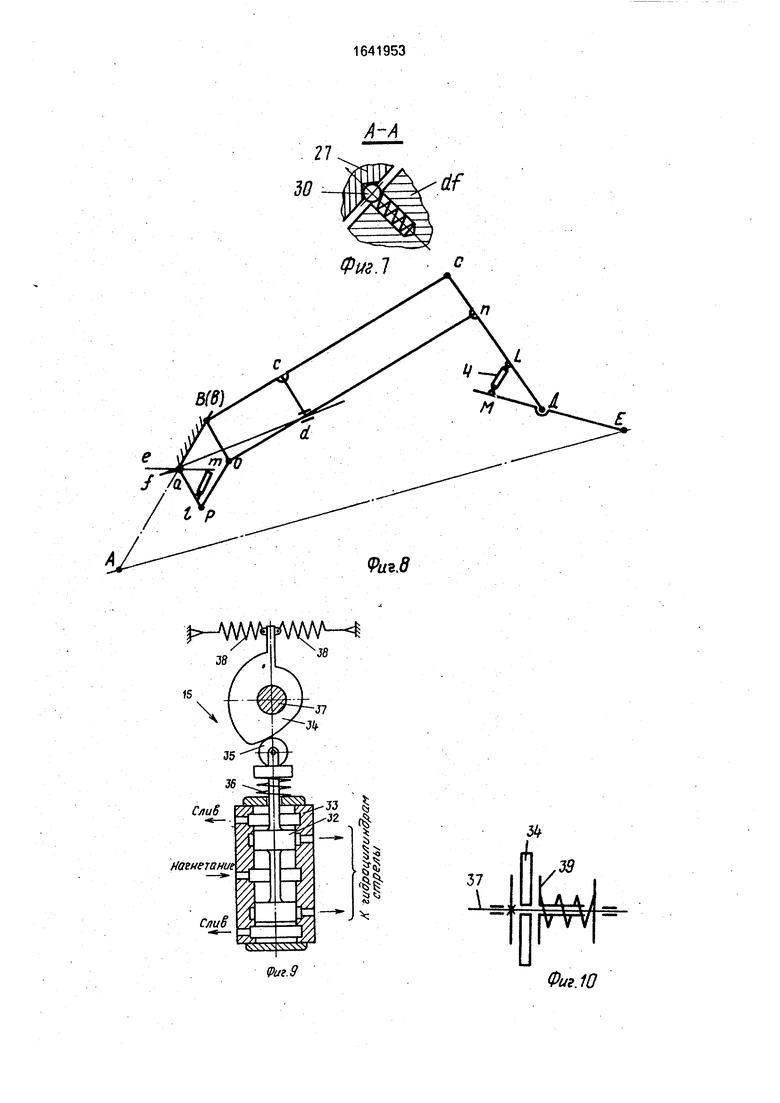
В следящем приводе с гидромеханическим передатчиком (фиг.8) кулисно-рычаж- ный механизм отличается от описанных ранее (фиг.З и 4) тем, что его шарнир b совмещен с осью пяты стрелы В, шарнир а расположен на отрезке АВ, а шарнир с - на оси стрелы В С, кулиса df жестко соединена
с рычагом af (вместо df в схеме по фиг.З и 4) со стороны шарнира а, а с рычагом cd - шарниром с ползуном. Сохранено прежнее геометрическое подобие ломаных abed и
5 ABCD, а также рычага af и расстояния DE. Неподвижным является звено ab. Звено ае, имитирующее угловые перемещения ковша, отнесено к полюсу а, сохранена описанная ранее гидравлическая система передачи уг10 ловых перемещений от ковша к этому звену и устройство для хранения информации об исходном положении рычага af. Для передачи кулисно-рычажному механизму угловых перемещений рукоятки дополнительно вве5 дена тяга dn, которая совместно с рычагом cd образует параллелограммный механизм, а для приведения этих перемещений к полюсу а еще четыре тяги bo, ар, do и ор, причем bo ар cd; do be; op ab. 0Выходные сигналы остаются прежними.
Стабилизатор траектории 15 копания с кулачковым толкателем (фиг.9) состоит из гидравлического распределителя с запор5 но-регулирующим золотником 32, перемещающимися в корпусе 33 от кулачкового толкателя, состоящего из кулачкз 34 и установленного на золотнике ролика 35, поджимаемого к кулачку пружиной 36. Кулачок 34
0 свободно посажен на валик 37, жестко соединенный в полюсе d (фиг.З и 4) или а (фиг.8) кулисно-рычажного механизма с рычагом соответственно df или af, и в нерабочем состоянии посредством пружин 38 (фиг.9) и
5 фиксатора (фиг.7) устанавливается в равновесное положение, при котором золотник перекрывает каналы, соединяющие нагнетательную и сливные магистрали с полостями гидроцилиндров стрелы. Такое
0 положение золотик сохраняет на протяжении всего времени рычажного управления экскаватором.
Рабочая поверхность кулачка 34 состоит из трех характерных участков; двух кру5 говых цилиндрических поверхностей постоянной кривизны - меньшей и большей, соответствующих крайним нижнему и верхнему положениям золотника, и переходной цилиндрической поверхности пере0 менной кривизны. Валик 3 соединяется с кулачком 34 посредством фрикционной муфты 39 (фиг. 10). Стабилизатор угла копания 17с винтовым толкателем (фиг.11) отличается от стабилизатора траектории
5 копания 15 конструкцией толкателя, выполненного в виде пары винт - гайка. Винт 40 через упорный подшипник 41 одним концом соединен с золотником гидрораспределителя, а другим по схеме скользящей шпонки - с рычагом de (фиг.З и 4) или ае (фиг 8) кулисно-рычажного механизма. Гайка 42 (фиг.11) установлена на неподвижной части экскаватора - на корпусе гидрораспределителя с возможностью свободного вращения. Она выполнена заодно целое с рычагом 27 (также фиг.6). В нерабочем состоянии га йка 42 расторможена, а гидрораспределитель отключен от основной гидравлической системы экскаватора, В таком состоянии гидпппмпмндр ковша подготовлен для работы в режиме ручного управления,
Перед включением автоматичесокго режима оператор, управляя вручную, устанавливает в исходное положение ковш, а вместе с ним кулису af (фиг.З и 4) или df (фиг.8), задавая тем самым траекторию движения шарнира D. Для работы в автоматическом режиме золотники распределителей стрелы 9 и ковша 11 (фиг,2)устанавливаются в нейтральное положение и вместо них подключаются стабилизатор траектории копания и стабилизатор угла копания. Для этого валик 37 стабилизатора траектории копания посредством фрикционной муфты 39 (фиг. 10) сцепляют с кулачком 34, который, вращаясь вместе с валиком 37, приводит в движение золотник 32 (фиг.9), сообщающий нагнетательную и сливные линии с соответствующими полостями гидроцилиндров стрелы.
Для подключения стабилизатора угла копания 17 гайку 42 затормаживают тормозом 31. При этом выходной сигнал отклонения угла копания от заданного значения в виде углового перемещения рычага de(ae) (фиг.З и 4 и 8) относительно заторможенного звена 27(также фиг.6) или гайки 42 преобразуется в поступательное движение золотника, который сообщает нагнетательную и сливные магистрали с соответствующими полостями гидроцилиндра ковша.
При подаче определенного количества рабочей жидкости в соответствующие полости гидроцилиндров стрелы и ковша обеспечивается угловое перемещение стрелы b в направлении уменьшения отклонения корректируемой траектории от заданной и угловое перемещение ковша в направлении снижения отклонения фактического угла копания от заданного.
После устранения отклонения стрелы валик 37 совместно с кулачком 34 стабилизатора траектории копания возвращается в исходное положение,
После корректировки положения ковша рычаг de(ae) совмещается со звеном 27 (фиг.6) и золотник стабилизатора угла копания 17 перекрывает каналы подачи рабочей жидкости к гидроцилиндру ковша.
Стабилизатор угла копания 18 с дифференциальным толкателем (фиг, 12) отличается от описанного стабилизатора конструкцией толкателя и состоит из двух
косозубых зубчатых колес 43,44, входящих в зацепление с одним шевронным колесом 45. Косозубое колесо 43 жестко соединено со звеном 27 кулисно-рычажного механизма (фиг.6), а колесо 44 с рычагом de(ar) (фиг.З,4
0 и 8), Шевронное колесо 45 свободно вращается на штоке золотника и через упорные подшипники 46 и 47 (фиг. 12) может перемещать его в осевом направлении. Нерабочему состоянию соответствует растормо5 женное, а рабочему (в автоматическом режиме) заторможен мое посредством тормоза 31 (фиг.6) положение косозубого колеса 43. При отклонении угла копания от заданного косозубое колесо 44, вращаясь, перемещает
0 в осевом направлении шевронное колесо 45, а вместе с ним золотник, который регулирует поток рабочей жидкости, подаваемой в гидроцилиндр ковша.
Формула изобретения
51.Устройство автоматического управления гидравлическим экскаватором, включающее стрелу и шарнирно связанные с ней рукоять, ковш и гидроцилиндры управления, маслостанцию, систему трубопроводов
0 с запорно-регулирующей арматурой, заполненную рабочей жидкостью, и следящий привод, отличающее ся тем, что, с целью упрощения управления экскаватором, повышения качества работ и производитель5 ности при производстве зачистных и планировочных операций при обеспечении движения ковша по прямолинейным траекториям, пересекающимся в фиксированной точке в зоне опорного контура механизма
0 передвижения и положения касательной силы сопротивления грунта, копанию, направ- ленной в эту же зону, оно снабжено стабилизаторами траектории и углов копания, выполненными в виде гидрораспреде5 лителей с запорно-регулирующими золотниками с приводом и установленными в системе трубопроводов с возможностью дозированной подачи рабочей жидкости в полости гидроцилиндров стрелы и ковша,
0 при этом приводы золотников гидрораспределителей соединены со следящим приводом, причем стабилизатор траектории копания имеет кулисно-рычажный механизм с управляющим кулачковым толкате5 лем и фрикционную муфту включения, при этом управляющий кулачковый толкатель установлен с возможностью осевого перемещения золотника гидрораспределителя, а стабилизатор угла копания имет винтовую пару, гайка которой установлена с возможностью ее перемещения в пространстве и фиксаций заданного угла копания, а винт - с возможностью взаимодействия с золотником в осевом направлении,
2.Устройство по п. 1, о т л и ч а ю щ е - е с я тем, что кулачковый толкатель золотника стабилизатора траектории копания снабжен упругими элементами возврата в исходное положение и подпружиненным шариковым фиксатором.
3.Устройство по пп.1 и 2, о т л и ч a tout е е с я тем, что стабилизатор угла копания снабжен дифференциальным механизмом управления, выполненным из двух косозу- бых шестерен и сцепленной с ними шеврон- ной шестерни, при этом одна косозубая шестерня установлена с возможностью фиксации заданного угла копания, а другая соединена со следящим приводом, причем шевронная шестерня установлена с воз- можностью свободного вращения на штоке золотника и его осевого перемещения.
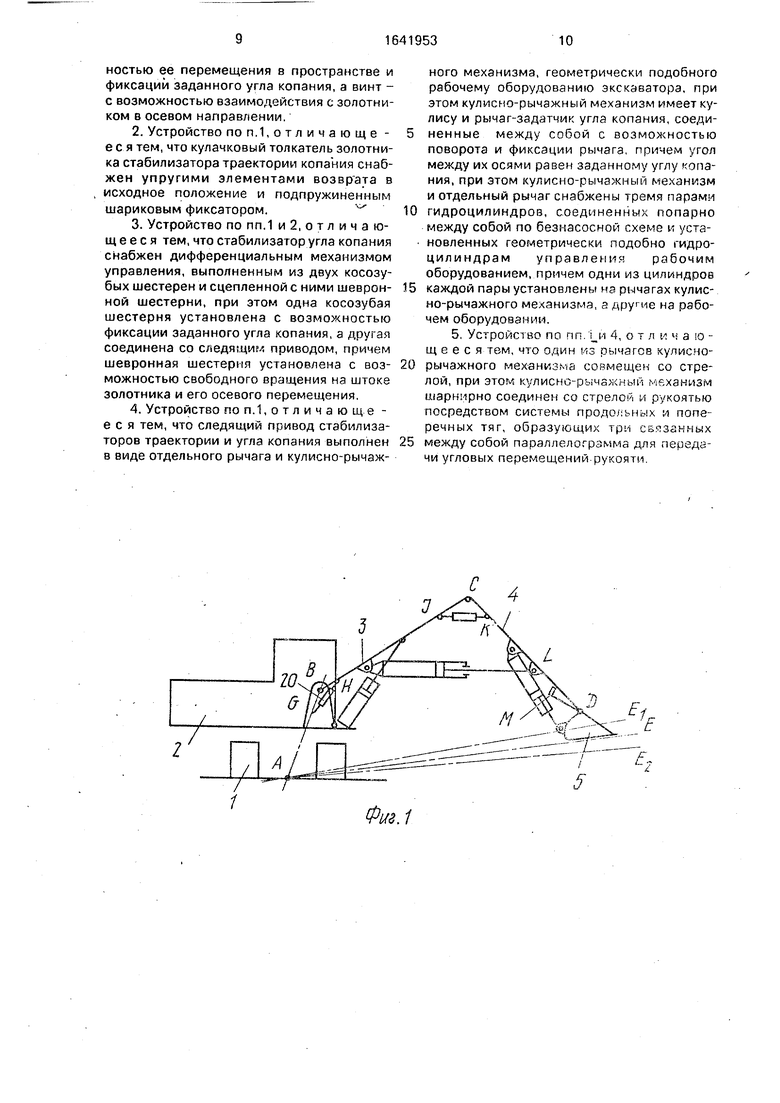
4.Устройство поп.1,отличающе - е с я тем, что следящий привод стабилизаторов траектории и угла копания выполнен в виде отдельного рычага и кулисно-рычажного механизма, геометрически подобного рабочему оборудованию экскаватора, при этом кулисно-рычажный механизм имеет кулису и рычаг-задатчик угла копания, соединенные между собой с возможностью поворота и фиксации рычага, причем угол между их осями равен заданному углу копания, при этом кулисно-рычажный механизм и отдельный рычаг снабжены тремя парами гидроцилиндров, соединенных попарно между собой по безнасосной схеме и установленных геометрически подобно гидроцилиндрам управления рабочим оборудованием, причем одни из цилиндров каждой пары установлены на рычагах кулис- но-рычажного механизма, а другие на рабочем оборудовании.
5, Устройст во по пп ij-i 4, о т л и ч а ю - щ е е с я тем, что один пз рычагов кулисно- рычажного механизма совмещен со стрелой, при этом кулисно-рычажный механизм шарнмрно соединен со стрелой и рукоятью посредством системы продольных и поперечных тяг, образующих три связанных между собой параллелограмма для передачи угловых перемещений рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рабочим оборудованием экскаватора | 1978 |
|
SU885458A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1652446A1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Устройство для моделирования рабочего процесса гидравлического экскаватора | 1985 |
|
SU1305765A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |

Изобретение относится к экскаваторо- строению, точнее к гидравлическим экскаваторам. Цель - упрощение управления экскаватором, повышение качества работ и производительности при производстве за- чистных и планировочных операций при обеспечении движения ковша по прямолинейным траекториям, пересекающимся в фиксированной точке в зоне опорного контура механизма передвижения и положения касательной силы сопротивления грунта копанию, направленной в эту же зону. Экскаватор включает ходовое устройство 1, поворотную платформу 2, стрелу 3, рукоять 4, ковш 5 и следящий привод (СП), который снабжен стабилизаторами траектории и углов копания, выполненных в виде гидрораспределителей (ГР) с запорно-регулирую- щими золотниками с приводом В систему трубопроводов установлены ГР с возможностью дозированной подачи рабочей жидкости в полости гидроцилиндров стрелы и ковша. Подвижные элементы приводов обеспечивают осевые перемещения золотников. Неподвижные элементы приводов (гайка) служат для задания сохраняемых параметров копания (угла копания). Геометрически подобный рабочему оборудованию экскаватора СП выполнен из отдельного рычага и КРМ и снабжен тремя парами гидроцилиндров, соединенных между собой попарно и размещенных геометрически подобно цилиндрам управления, причем один из цилиндров каждой пары установлен на рычагах СП а другие - на рабочем оборудовании. При переводе на режим автоматического управления СП позволяет сохранять заданные углы и траектории копания. При необходимости может быть произведена коррекция элементов СП с изменением положения КРМ 4 з.п ф-лы, 12 ил сл с ( ь ю ел ы
г
/
У LcEfe i / -.-v -
Фю.1
/W/y//7////////t/Tv/y/TF
}
,
-
- i
5
/0
///
/5CfW
Oi
6
-/3
Фаг. I
Я-
17W.16,
9i
д
Фиг.З
$
&Q ,L)20(/2 24} WM d
j
/ i6
9( 2{(2Ы5) Фиг. 5
/
У
ФагМ
51 off у
М if иг. 6
Нагнетание
Слив
Риг.9
Риг.8
37
JL
#
А
J9
D
Йи.//7
de(ae)
tf ъидроцилиндру Фиг. 11ковша
it
in
ъ
it
ушрг
w/mm.
PR
| Г. И. Носова | 0 |
|
SU353002A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4059196, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
